基于动态规划的机器人调度路径规划方法及系统与流程
本发明涉及动态路径规划,尤其涉及一种基于动态规划的机器人调度路径规划方法及系统。
背景技术:
1、本发明专利使用的动态规划(dynamic programming,dp),利用了美国数学家贝尔曼(r.bellman)等人在研究多阶段决策过程的优化问题时创立了动态规划原理。
2、医院中通过小车来进行物资的转运,在现有的物质转运过程中,通常是采用人工推动小车移动来实现的。其中,医院各科室就是物流的转运站点,当医院较大转运站点较多时。则需要投入大量的人力物力来完成物资的转运工作。为了减少工作量,医院逐步采用agv小车来完成物资的转运工作。agv小车属于agv物流系统的组成部分。现有的agv物流系统一般由agv小车、智能化站点、通讯单元、服务器(及基本软件包)、充电桩、配电系统、电梯控制系统、门禁控制系统等组成。
3、现有技术中,服务器对agv小车的调度通常采用随机的方法来进行调度,也即是当有转运任务是,服务器通过随机的方法将其中某一空闲agv小车调度来执行转运任务,这样会导致agv小车完成转运任务的过程中所移动的路程远、时间长以及导致整体agv物流系统的运行成本高的问题。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种基于动态规划的机器人调度路径规划方法及系统。
2、一方面,为实现上述目的,根据本发明实施例的基于动态规划的机器人调度路径规划方法包括步骤:
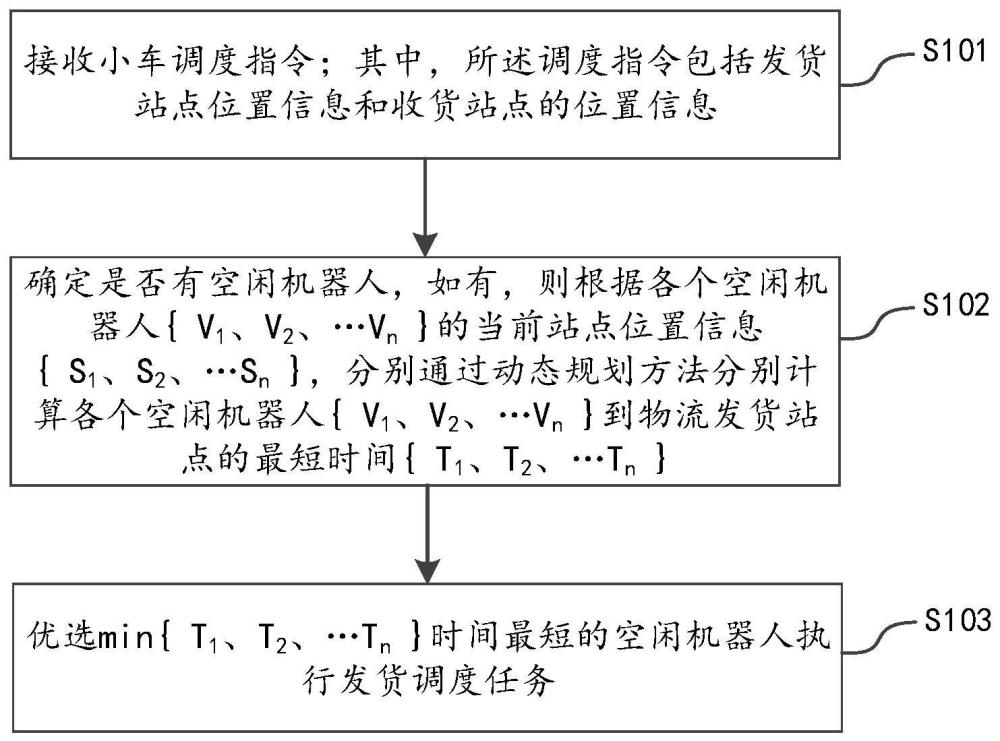
3、接收小车调度指令;其中,所述调度指令包括发货站点位置信息和收货站点的位置信息;
4、确定是否有空闲机器人,如有,则根据各个空闲机器人{v1、v2、…vn}的当前站点位置信息{s1、s2、…sn},分别通过动态规划方法分别计算各个空闲机器人{v1、v2、…vn}到物流发货站点的最短时间{t1、t2、…tn};
5、优选min{t1、t2、…tn}时间最短的空闲机器人执行发货调度任务。
6、进一步地,根据本发明的一个实施例,根据第一空闲机器人v1当前站点位置信息s1,通过动态规划方法计算空闲机器人v1到物流发货站点的最短时间t1的方法包括步骤:
7、根据第一空闲机器人v1当前站点位置信息s1,获取第一空闲机器人v1从当前站点位置s1到达发货站点各可选择途径的所有站点信息;
8、分别获取第一空闲机器人v1到达发货站点途径各个站点的时间{t1、t2、…tn};
9、通过动态规划方法计算所述第一空闲机器人v1到物流发货站点的最短时间t1。
10、进一步地,根据本发明的一个实施例,所述通过动态规划方法计算所述第一空闲机器人v1到物流发货站点的最短时间t1包括步骤:
11、根据各站点距离所述物流发货站点的远近关系分别划分为多个阶段状态k=1,2,3,…n;
12、分别获取第一空闲机器人v1处于各个决策阶段的决策集uk(xk);其中,第一空闲机器人v1处于各个决策阶段的站点状态变量集合为xk;
13、根据站点状态变量集合xk和各个决策阶段的决策集uk(xk),分别通过逆序解法寻优法计算空闲机器人v1到物流发货站点的最短时间t1(最优路线/距离)。
14、进一步地,根据本发明的一个实施例,所述逆序解法寻优法计算公式为:
15、
16、其中,xk+1=tk(xk,uk)为状态转移律,在采取uk)决策后,位置变化的规律;
17、其中,{rk(xk,uk)为阶段指标函数,在选择uk决策后产生的距离/或时间;
18、其中,为表示求优值(最短距离/或时间t1)。
19、进一步地,根据本发明的一个实施例,当k=n时,公式的边界条件为:fn+1(xn+1)≡0。
20、进一步地,根据本发明的一个实施例,所述基于动态规划的机器人调度路径规划方法还包括步骤:
21、当第一空闲机器人v1为min{t1、t2、…tn}时间最短的空闲机器人时,获取第一空闲机器人v1从当位置到物流发货站点的过程中,各个决策阶段的最优决策
22、控制所述第一空闲机器人v1按照各个决策阶段的最优决策集所确定的最优路线从当前位置移动至物流发货站点。
23、进一步地,根据本发明的一个实施例,所述基于动态规划的机器人调度路径规划方法还包括步骤:
24、根据第一空闲机器人v1的物流发货站点位置信息,通过动态规划方法计算第一空闲机器人v1到物流发货站点到收货站点的最短时间t1sd;
25、获取第一空闲机器人v1从物流发货站点到收货站点的过程中,各个决策阶段的最优决策
26、控制所述第一空闲机器人v1按照各个决策阶段的最优决策集所确定的最优路线从物流发货站点到收货站点。
27、另一方面,本发明还提供一种基于动态规划的机器人调度路径规划系统,包括:空闲机器人、客户端和服务器,所述空闲机器人设有多个,所述服务器分别与所述空闲机器人、客户端之间通信连接;
28、所述服务器包括:
29、命令接收模块,所述命令接收模块用于接收所述客户端发送的小车调度指令;其中,所述调度指令包括发货站点位置信息和收货站点的位置信息;
30、空闲机器人调动模块,所述空闲机器人调动模块用于确定是否有空闲机器人,如有,则根据各个空闲机器人{v1、v2、…vn}的当前站点位置信息{s1、s2、…sn},分别通过动态规划方法分别计算各个空闲机器人{v1、v2、…vn}到物流发货站点的最短时间{t1、t2、…tn};
31、发货调动执行模块,所述发货调度模块用于优选min{t1、t2、…tn}时间最短的空闲机器人执行发货调度任务。
32、进一步地,根据本发明的一个实施例,所述空闲机器人调动模块包括:
33、第一空闲机器人途径站点获取模块,所述第一空闲机器人途径站点获取模块用于根据第一空闲机器人v1当前站点位置信息s1,获取第一空闲机器人v1从当前站点位置s1到达发货站点各可选择途径的所有站点信息;
34、第一空闲机器人途径站点时间获取模块,所述第一空闲机器人途径时间站点获取模块分别获取第一空闲机器人v1到达发货站点途径各个站点的时间{t1、t2、…tn};
35、第一空闲机器人最短时间获取模块,所述第一空闲机器人最短时间获取模块通过动态规划方法计算所述第一空闲机器人v1到物流发货站点的最短时间t1。
36、进一步地,根据本发明的一个实施例,所述空闲机器人为医用agv小车。
37、本发明实施例提供基于动态规划的机器人调度路径规划方法及系统中,通过接收小车调度指令;确定是否有空闲机器人,如有,则根据各个空闲机器人{v1、v2、…vn}的当前站点位置信息{s1、s2、…sn},分别通过动态规划方法分别计算各个空闲机器人{v1、v2、…vn}到物流发货站点的最短时间{t1、t2、…tn};优选min{t1、t2、…tn}时间最短的空闲机器人执行发货调度任务。如此,可精确计算确认其中以空闲机器人到达发货站点路径最短或时间最短,并调用最短实际的空闲机器人执行转运任务,可使得致整体agv物流系统运行成本最低。
38、通过医院各科室就是物流的智能化站点,某科室下达物流指令,调度空闲小车进行运输,空小车有的在基站待命,有的在回基站的路上某智能化站点,需要经过精确计算确认哪辆小车到达发货站点路径最短或时间最短,使得运行成本最低。
- 还没有人留言评论。精彩留言会获得点赞!