一种基于数字孪生技术的机械系统模型自更新方法及系统
本发明涉及机械系统控制领域,特别涉及一种基于数字孪生技术的机械系统模型自更新方法及系统。
背景技术:
1、随着航空航天、数字孪生、先进制造等领域的发展,对机械系统的控制精度、响应速度以及实时性能提出了更高标准的要求,机械系统的结构也发展得更为多样。然而机械系统结构复杂性的提升,也带来了更为复杂的动力学模型,对其控制系统的设计提出了更高的挑战。
2、在动力学建模或控制系统设计过程中,考虑到建模的不确定性或参数的时变特性,如假设不合理引发的参数误差、伺服电机长时间工作时系统特性的缓慢变化、形状记忆合金重复使用后性能的退化等,均会引发相应机械系统动力学特性的改变,增大数字数字孪生系统的误差,这对系统的跟踪、预测与控制具有负面影响。因此,可引入观测算法,根据机械系统状态的输入,捕捉系统不确定性,反馈学习至数字数字孪生系统中,降低系统误差。
3、在控制领域,机械系统的变化期望得到实时在线的观测,并更新至相对应的数字数字孪生系统中,同时,不同于上位机,硬件系统的计算性能通常相对受限。因此,控制系统的设计过程需要考虑到算法实时性,以及硬件可行性,需要算法在较低的时间成本与计算成本下,实现较快速的更新迭代。故可采用伪逆算法等非迭代更新的方式,在捕获到系统不确定性后,快速建立超定线性方程组,逼近机械系统的内部系数,保证控制系统的快速反应能力与鲁棒性。
4、如何自适应计算机械模型与其数字孪生系统之间的误差并更新数字孪生系统的参数,是本领域亟需解决的问题。
技术实现思路
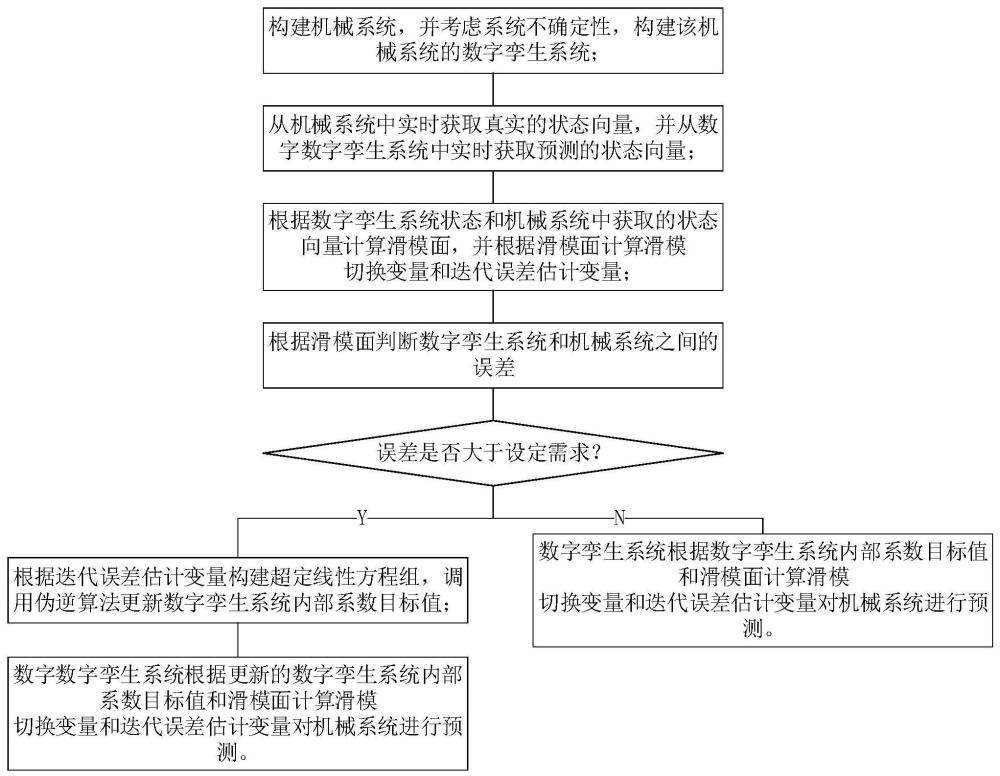
1、为了降低在无人机、机械臂、航天器等机械系统中,降低数字孪生系统观测、控制与预测性能的误差,本发明提出一种基于数字孪生技术的机械系统模型自更新方法,构建机械系统,并考虑系统不确定性,构建该机械系统的数字孪生系统,利用数字孪生系统预测机械系统的状态变化,并根据预测值对机械系统进行跟踪、观测以及预测,并根据预测结果对机械系统进行控制,同步机械系统和数字孪生系统具体包括以下步骤:
2、构建机械系统,并考虑系统不确定性,构建该机械系统的数字孪生系统;
3、从机械系统中实时获取真实的状态向量,并从数字数字孪生系统中实时获取预测的状态向量;
4、根据数字孪生系统状态和机械系统中获取的状态向量计算滑模面,并根据滑模面计算滑模切换变量和迭代误差估计变量;
5、根据滑模面判断数字孪生系统和机械系统之间的误差是否大于设定需求;
6、若误差大于设定需求,则根据迭代误差估计变量构建超定线性方程组,并调用伪逆算法更新数字孪生系统内部系数目标值;
7、数字数字孪生系统根据更新的数字孪生系统内部系数目标值和滑模面计算滑模切换变量和迭代误差估计变量对机械系统进行预测;
8、若误差满足设定需求,则数字数字孪生系统根据数字孪生系统内部系数目标值和滑模面计算滑模切换变量和迭代误差估计变量对机械系统进行预测。
9、进一步的,机械系统的动力学方程表示为:
10、
11、其中,x=[x1,x2,…,xn]t为机械系统状态向量,xn表示机械系统中第n个振子的状态,本发明中所述的状态可为机械系统中振子的位移、角度、角速度等,本领域技术人员可根据机械系统的构型进行选取作为系统状态;与分别为机械系统状态向量对时间的一阶导数与二阶导数;表示系统参数对机械系统动力学模型的影响,p为的内部系数;表示控制输入对机械系统动力学模型的影响,表示为gnm表示机械系统中第m个控制器对第n个振子的影响,q为的内部系数,n为系统振子数目,m为系统控制器数目;u为机械系统的控制输入。
12、进一步的,数字孪生系统的动力学模型表示为:
13、
14、其中,为数字孪生系统预测得到的状态向量;表示数字孪生系统中第n个振子的状态;与分别为数字孪生系统状态向量对时间的一阶导数与二阶导数;表示数字孪生系统参数对动力学模型的影响,其内部系数为表示数字孪生系统控制输入对动力学模型的影响,其内部系数为表示为其中表示数字孪生系统中第m个控制器对第n个振子的影响;u为机械系统的控制输入;为滑模切换变量向量,为第n个振子的滑模切换变量向量;为误差估计变量向量,为第n个振子的误差估计变量向量。
15、优选地,本实施例中表示的是机械系统的参数值,表示的是本领域技术人员根据力学理论构建的机械系统模型的参数值,由于机械系统的不确定性等原因,导致两组参数之间存在偏差,本发明中根据超螺旋滑模观测算法估计它们之间的偏差,从而还原机械系统的参数值,提高对机械系统观测、预测的准确性。
16、进一步的,根据数字孪生系统状态和机械系统中获取的状态向量计算滑模面,表示为:
17、
18、其中,为滑模面向量,表示为表示滑模面向量的第i个元素,即机械系统中第i个振子对应的滑模面;λ1与λ2为滑模面参数向量,本领域技术人员可以根据经验选择、调整,也可以根据仿真或者实物试验效果确定、调整;x为机械系统真实的状态向量;为数字孪生系统预测的状态向量;为x的一阶导数;为的一阶导数。
19、进一步的,计算滑模切换变量的过程包括:
20、
21、其中,表示机械系统中第i个振子的滑模切换变量;|·|为绝对值函数,tanh(·)为双曲正切函数,κ1i与κ2i为滑模切换变量参数,本领域技术人员可以根据经验选择、调整,也可以根据仿真或者实物试验效果确定、调整。
22、进一步的,计算迭代误差估计变量的过程包括:
23、
24、其中,表示机械系统中第i个振子的迭代误差估计变量;κ3i与κ4i为误差估计变量参数,本领域技术人员可以根据经验选择、调整,也可以根据仿真或者实物试验效果确定、调整。
25、进一步的,当数字数字孪生系统运动流对机械系统的运动流完成逼近后,选取时间区间t∈[t0,tk],超定线性方程组表示为:
26、
27、其中,表示时刻t,在数字数字孪生系统内部第一系数目标值为情况下数字数字孪生系统参数对动力学模型的影响;表示时刻t,在数字数字孪生系统内部第二系数目标值为情况下数字数字孪生系统控制输入对动力学模型的影响;u为机械系统的控制输入;表示时刻t,在数字数字孪生系统内部第一系数为情况下数字数字孪生系统参数对动力学模型的影响;表示时刻t,在数字数字孪生系统内部第二系数为情况下数字数字孪生系统控制输入对动力学模型的影响;表示时刻t的迭代误差估计变量。
28、进一步的,为了逼近机械系统当前内部系数将数字孪生系统当前内部系数更新为的求取过程包括:
29、
30、
31、
32、其中,表示矩阵a的逆矩阵,当矩阵a不可逆时,为穆尔-彭罗斯广义逆矩阵。
33、本发明提供一种基于数字孪生技术的机械系统模型自更新系统,用于实现一种基于数字孪生技术的机械系统模型自更新方法,包括数字孪生系统、误差判据模块、超螺旋滑模观测模块以及伪逆模块,其中:
34、数字孪生系统,用于对机械系统进行跟踪、观测以及预测,根据跟踪、观测以及预测得到的状态值实现对机械系统的控制;
35、超螺旋滑模观测模块,用于对用于根据机械系统实时的真实状态值和数字孪生系统实时的预测状态值计算滑模面,根据滑模面计算滑模切换变量和迭代误差估计变量;
36、误差判据模块,用于根据滑模面判断是否需要修正数字孪生系统中的参数;
37、伪逆模块,用于当需要修正数字孪生系统中的参数时,构建根据迭代误差估计变量构建超定线性方程组,并调用伪逆算法更新数字孪生系统内部系数目标值,利用目标值更新数字孪生系统的内部参数。
38、本发明提出的基于数字孪生技术的机械系统模型自更新算法,具有以下有益效果:
39、1.本发明的应用不受限于特定的机械系统,具有广泛的普适性。在数字数字孪生系统构建阶段,对于函式f与g无特定要求,具有此普适形式的机械系统均可应用本专利方法,因此,本发明可迁移至无人机、机械臂、物流小车、航天器等多种机械系统,为其控制系统提供理论指导,并辅助机械系统提升控制性能;
40、2.本发明充分考虑了使能算法的实时性,具有硬件可行性。对于超螺旋滑模观测模块,可以在给定合理参数下,实现对机械系统状态的有限时间收敛,同时,伪逆模块并非基于迭代方式更新,而是通过超定线性方程组的构建,直接进行数字数字孪生系统内部系数的求解,进一步保证了算法对机械系统的实时响应能力;
41、3.本发明对机械系统的时变特性与建模不确定性进行了考量,具有一定鲁棒性。本发明基于数字孪生技术的理论框架,将超螺旋滑模观测模块与伪逆模块耦合使用,如使用tanh(·)函数替换传统超螺旋滑模观测算法的sign(·)符号函数,可以使误差估计变量更为平滑,便于伪逆算法高效求解,超螺旋滑模观测模块可对系统不确定性进行在线实时估计,伪逆模块可将误差估计变量的数值学习至数字数字孪生系统的内部系数中,降低系统误差与不确定性,并进一步逼近机械系统。
- 还没有人留言评论。精彩留言会获得点赞!