面向区域防御防卫的海上无人船反攻击拦截型制导系统
本发明涉及海上无人船运动控制,具体而言,尤其涉及一种面向区域防御防卫的海上无人船反攻击拦截型制导系统。
背景技术:
1、为了保护海洋区域安全,许多国家已经开始研究如何利用无人船来应对海上的潜在危险。首先海上无人船需要具备自主制动和避障能力,以便在复杂的海况下对外界进攻船只进行有效的拦截和防御。这需要先进的避障技术和海上拦截算法,以便无人船能够快速、准确地识别目标并做出相应的决策。
2、目前,在海上无人船的运动控制领域中,国内外学者已经对海上无人船的攻防问题进行了相关研究,并提出许多攻防对抗控制方法,例如微分对策法,矩阵博弈法和基于强化学习的攻防对抗方法。微分对策法考虑的是攻防双方无人船之间的非合作博弈,每个决策无人船追求自己的最优利益,而不考虑对方的利益,通过调整策略来实现,以满足自己的目标。但它也面临着复杂性和计算开销等挑战,通常涉及到解动态系统的微分方程和变分问题,这可能非常复杂,需要高级数学和计算技巧来解决;矩阵博弈法是进攻型无人船和防御型无人船两者之间伴随有限策略集的零和博弈,涉及到寻找纳什均衡,通过选择最有利于自己的策略来竞争或对抗。但阵博弈法通常适用于具有离散策略的问题,对于那些具有连续策略或大规模策略空间的复杂问题,它的应用受到限制;基于强化学习的攻防对抗方法,攻击型无人船和防御型无人船都被建模为强化学习代理,他们通过与环境交互来学习最优策略。该方法能够在不断的对抗中适应攻击者和防御者的策略变化,同时通常需要大量的计算资源和时间来训练和执行策略,尤其是在复杂的对抗环境中。总之,海上无人船反攻击拦截技术是一个多领域、多技术的复杂系统,并且现有的无人船运动控制依然存在域保护的安全问题。
3、总体而言,现有的无人船运动控制依然存在如下问题:第一、现有的微分对策法、矩阵博弈法中,一般不考虑避碰问题,只考虑攻防双方之间的对抗问题,即考虑防御型无人船拦截攻击性无人船的行为,而当涉及领土区域防卫和复杂海域时,无人船自身的安全性问题便涉及到拦截任务的成功率问题。第二、现有的基于强化学习的对抗方法中,其拦截参数以及避碰参数都需要通过奖励函数不断的训练获得,当更换另一个对抗场景后需要重新训练,不能保证拦截任务的成功率问题。第三、现有的对抗性的拦截方法中,一般默认已知攻击型无人船的真实位置信息,但是在现实的对抗场景中,一般受到外界的干扰信息,无法真实获取攻击型无人船的真实位置。
技术实现思路
1、为解决上述不足,本发明在现有研究的基础上,除了考虑海上复杂环境中的安全问题,还需要考虑海上无人船避碰约束下的反攻击拦截问题。基于李雅普诺夫稳定性理论,提出了一种面向区域防御防卫的海上无人船反攻击拦截型制导系统,实现了海上无人船保护者成功拦截攻击者,以达到保护海上领土的目的。在运动学层面上,通过对海上无人船进攻者的模糊定位,以及对海上无人船攻击者进行进攻点预测,寻找最优拦截点。通过对攻击型无人船位置信息噪声信号的测量来构建一个拦截权重,用于实现最优的拦截策略。并将避碰转换为约束问题,来保证在拦截过程中的安全性问题。
2、本发明采用的技术手段如下:
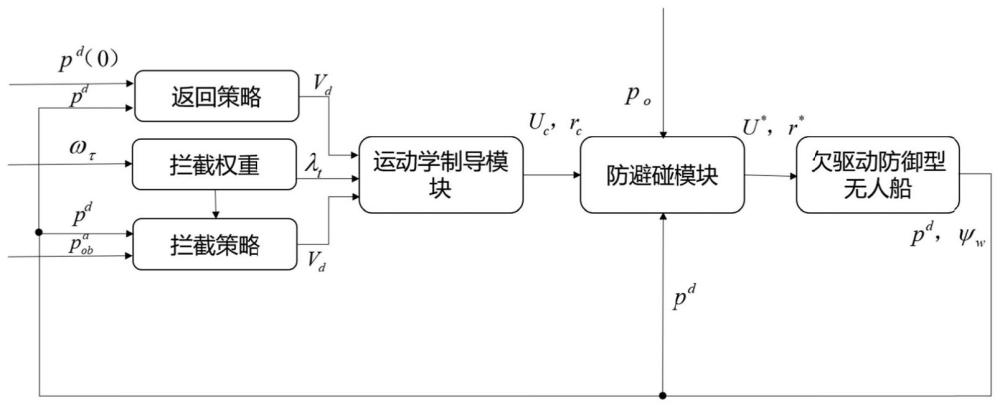
3、一种面向区域防御防卫的海上无人船反攻击拦截型制导系统,包括反攻击拦截权重模块、反攻击拦截制导模块、运动学制导模块和防碰撞模块;
4、所述反攻击拦截权重模块的输入端接收海上环境噪声信息ωτ,所述反攻击拦截权重模块的输出端输出反攻击拦截的权重参数λt至运动学制导模块和拦截策略模块的输入端;
5、所述反攻击拦截制导模块包括返回策略模块和拦截策略模块;所述返回策略模块的输入端接收欠驱动防御型无人船的位置信息pd以及初始位置信息pd(0),所述返回策略模块的输出端输出欠驱动防御型无人船速度误差vd至运动学制导模块的输入端;所述拦截策略模块的输入端分别接收欠驱动防御型无人船的位置信息pd、外部输入的海上进攻型无人船的位置信息以及反攻击拦截的权重参数λt,所述拦截策略模块的输出端输出欠驱动防御型无人船速度误差vd至运动学制导模块的输入端;
6、所述运动学制导模块的输入端接收反攻击拦截的权重参数λt和欠驱动防御型无人船速度误差vd,所述运动学制导模块的输出端输出欠驱动防御型无人船的目标速度信号uc和目标角速度rc至防碰撞模块的输入端;
7、所述防碰撞模块的输入端接收欠驱动防御型无人船的目标速度信号uc、目标角速度rc、欠驱动防御型无人船的位置信息pd和海上静态障碍物的位置信息po,所述防碰撞模块的输出端输出优化后的前向速度信号u*和优化后的角速度信号r*至欠驱动防御型无人船的输入端。
8、进一步地,所述欠驱动防御型无人船模型为:
9、
10、其中,u为合速度,表示为ψw代表的是海上无人船与地球坐标系下的夹角;β代表的是海上无人船航行时受横荡影响产生的侧滑角,表示为β=arctan(v/u);表示侧滑角β的导数值;p=(x,y),ψ分别代表海上防御型无人船在地球坐标系下x、y轴上的位置及艏摇角信息;u,v,r∈r分别代表海上无人船在船体坐标系下纵荡速度、横漂速度和艏摇角速度。
11、进一步地,所述欠驱动防御型无人船的位置信息为:
12、引入一个正参数l来改变防御型无人船的位置pd=p+le,其中表示一个旋转向量,对pd求导,得到:
13、
14、进一步地,所述反攻击拦截权重模块的设计步骤如下:
15、攻击型无人船的真实位置坐标为pa=(xa,ya)t;而由于噪声的干扰,防御型无人船获取攻击性无人船的位置信息为假设海上噪声信息为因此防御型无人船获取攻击性无人船的位置信息具体表示为:
16、
17、其中,海上噪声信息服从高斯分布ωτ~n(0,μ||pa-pd||2i2),并引入一个正参数μ>0和单位二维矩阵i2;并且要使得||ωτ||≤||dap||,dap表示欠驱动海上防御型无人船与海上攻击型无人船之间的距离,即噪声信号小于两者距离;
18、设计一个权重参数λt,用于在当防御型无人船根据噪声信号来确定执行哪种防御策略,权重参数λt表示为:
19、
20、其中,海上噪声信息函数表示攻击型无人船的噪声信号的概率密度,积分区间[-υ,υ]表示单位长度,意义为在单位面积求取攻击者的噪声信号概率。
21、进一步地,所述反攻击拦截制导模块的设计步骤如下:
22、定义集合表示一类点与攻击型无人船比这类点与防御型无人船近的点,定义表示如下:
23、
24、几何意义上,代表最接近安全域的位置坐标;ω代表保护域的位置坐标;根据攻击型无人船的不同行为,设计防御型无人船的制导信号输入,攻击型无人船试图攻击或者入侵保护域时,采用拦截策略;当攻击型无人船试图逃离,并撤退时,采用返回策略,具体表达式为:
25、
26、其中,正参数c表示控制增益;pd(0)表示防御型无人船的初始位置信息;ωi表示防御型无人船的侦测范围,只有攻击型无人船在防御型无人船的侦测范围,防御型无人船才会采取拦截策略。
27、进一步地,所述运动学制导模块的设计步骤如下:
28、基于防御型无人船的制导信号输入表达式,设计防御型无人船最终制导律公式为:
29、
30、其中具体表达式为:
31、
32、进一步地,所述防碰撞模块的设计步骤如下:
33、静态障碍物的坐标为po=(xo,yo)t,静态障碍物的半径为ro;h代表的是防御型无人船被建模的半径;θo代表欠驱动防御型无人船防止与静态障碍物碰撞的角度表示为:
34、
35、其中,向量g=pd-po,用于判断对避碰往左侧避碰还是往右侧避碰;
36、设计与静态障碍物之间的控制避碰函数:
37、hio(pd,po)=||pd-po||2-koθo2-ho2≥0
38、其中,kio表示与静态障碍物避碰角度相关的正参数;避碰距离hio应满足hio>h+rio;do=||pd-po||代表的欠驱动防御型无人船与静态障碍物之间的距离;
39、为了满足避碰约束,进一步得到如下公式:
40、
41、其中,γio为正参数,为ho(pd,po)的导数,根据防御型无人船最终制导律公式,对前向速度和角速度进行约束,并进一步得到优化的速度:
42、
43、
44、其中,u*,r*分别为优化后的前向速度和角速度,uc,rc为之前制导的前向速度和角速度。
45、较现有技术相比,本发明具有以下优点:
46、本发明提供了一种面向区域防御防卫的海上无人船反攻击拦截型制导系统,将保护安全域的过程纳入防御制导方法中,并引入了一种新型的拦截攻击型海上无人船的防御方法,开发了保护安全域范围之外的拦截方法,以优化生成的最佳拦截点,约束防御型海上无人船的安全行驶,从而提高拦截攻击型海上无人船的效率和安全性。
47、本发明提供了一种面向区域防御防卫的海上无人船反攻击拦截型制导系统,针对静态可预见障碍物的位置坐标以及进攻型海上无人船模糊的位置坐标,构建了基于拦截策略的运动学制导模块和防避碰模块,并通过实时检测进攻型海上无人船与防御性海上无人船之间的距离以及静态障碍物的坐标,从而实现精确拦截进攻型海上无人船并避免与静态障碍物碰撞。同时,通过权值设计方式,当攻击型海上无人船试图攻击或入侵保护域时,采用拦截策略,提高了对攻击型海上无人船拦截的容错率,从而显著提高了防御性海上无人船的拦截效率。
48、本发明提供了一种面向区域防御防卫的海上无人船反攻击拦截型制导系统,能够更好地应对复杂多变的障碍物环境,提高了防御性海上无人船的实时有效拦截能力。
- 还没有人留言评论。精彩留言会获得点赞!