基于无人机追踪昆虫迁飞轨迹的方法及系统与流程
本发明涉及无人机调度,尤其涉及一种基于无人机追踪昆虫迁飞轨迹的方法、电子设备及计算机可读存储介质。
背景技术:
1、在大型农场和果园等广阔领域,手动检测瓜果和蔬菜的健康状况显然不切实际。为了应对这一挑战,采用了高清航拍的方法,通过启动无人机执行飞行任务,可以获得精确而清晰的瓜果和蔬菜的航拍高清图像,从而使农场管理人员能够有效评估植物的健康状况和生长情况。
2、然而,在这些广阔的农田中,自然生态系统中的昆虫群体也是大规模存在的。因此,不仅需要识别这些昆虫的种类,还需要判断它们是否对农作物造成危害。更进一步,了解危害昆虫的迁飞轨迹可以帮助确定它们在农田中的集中分布区域,这对于维护农业种植的顺利进行具有至关重要的意义。
3、因此,整合高清航拍技术和昆虫种类鉴别,以及危害昆虫的迁飞轨迹分析,对于现代农业的可持续发展和有效管理至关重要,有望提高农田的生产效率并最大程度地减少害虫造成的损失。
技术实现思路
1、本发明提供一种基于无人机追踪昆虫迁飞轨迹的方法,系统,电子设备,计算机可读存储介质,其主要目的在于减少害虫对农业种植产业造成的损失。
2、为实现上述目的,本发明提供的一种基于无人机追踪昆虫迁飞轨迹的方法,包括:
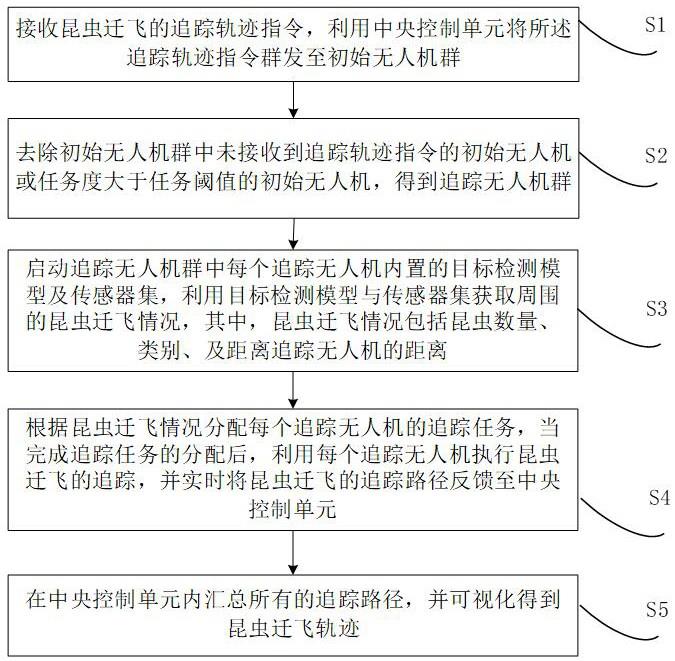
3、接收昆虫迁飞的追踪轨迹指令,利用中央控制单元将所述追踪轨迹指令群发至初始无人机群;
4、去除初始无人机群中未接收到追踪轨迹指令的初始无人机或任务度大于任务阈值的初始无人机,得到追踪无人机群;
5、启动追踪无人机群中每个追踪无人机内置的目标检测模型及传感器集,利用目标检测模型与传感器集获取周围的昆虫迁飞情况,其中,昆虫迁飞情况包括昆虫数量、类别、及距离追踪无人机的距离,所述目标检测模型的结构为:卷积层、归一化层、relu激活层、多级残差层、池化层、线性变化层及目标检测框生成层,且多级残差层先后顺序共有2层结构,第一层结构由两层卷积层组成,第二层结构由池化层、全连接层、relu激活层、全连接层、sigmoid激活层和融合层组成,其中,融合层将第一层结构的输出数据与第二层结构的输出数据执行点乘操作,目标检测框生成层由vgg模型组成;
6、根据昆虫迁飞情况分配每个追踪无人机的追踪任务,当完成追踪任务的分配后,利用每个追踪无人机执行昆虫迁飞的追踪,并实时将昆虫迁飞的追踪路径反馈至中央控制单元;
7、在中央控制单元内汇总所有的追踪路径,并可视化得到昆虫迁飞轨迹。
8、可选地,所述利用中央控制单元将所述追踪轨迹指令群发至初始无人机群,包括:
9、利用中央控制单元接收追踪轨迹指令,当中央控制单元成功接收到追踪轨迹指令后,自动生成无人机工作确认指令;
10、从数据库中调取目前已登记具备飞行能力的无人机的ip地址,并根据ip地址将无人机工作确认指令发送至每个具备飞行能力的无人机;
11、将接收到无人机工作确认指令并回传可工作回传指令的具备飞行能力的无人机确认为初始无人机,得到初始无人机群;
12、将追踪轨迹指令发送至初始无人机群。
13、可选地,所述去除初始无人机群中未接收到追踪轨迹指令的初始无人机或任务度大于任务阈值的初始无人机,得到追踪无人机群,包括:
14、接收预设的等待时间阈值,当中央控制单元将所述追踪轨迹指令群发至初始无人机群时,记录群发起始时间;
15、根据群发起始时间和等待时间阈值计算得到群发终止时间;
16、在群发终止时间到达后,去除未根据追踪轨迹指令回复追踪响应指令的初始无人机,并计算已根据追踪轨迹指令回复追踪响应指令的初始无人机的任务度;
17、去除任务度大于任务阈值的初始无人机,得到追踪无人机群。
18、可选地,所述计算已根据追踪轨迹指令回复追踪响应指令的初始无人机的任务度,包括:
19、获取初始无人机在当前时刻下的所有飞行任务集,对飞行任务集中每个飞行任务均执行如下操作:
20、判断飞行任务中是否明确有飞行结束时间,若飞行任务中没有明确的飞行结束时间,启动中央控制单元的任务时间分析模型;
21、确认没有明确的飞行结束时间的飞行任务的任务类型,在历史记录中寻找飞行任务的历史飞行数据,其中,历史飞行数据有完成该飞行任务的飞行起始时间和飞行结束时间;
22、根据所述任务类型、历史飞行数据利用任务时间分析模型分析得到初始无人机在当前时刻下的飞行结束时间;
23、根据初始无人机在当前时刻下的所有飞行任务集、每个飞行任务的飞行结束时间计算得到初始无人机的任务度。
24、可选地,所述根据初始无人机在当前时刻下的所有飞行任务集、每个飞行任务的飞行结束时间计算得到初始无人机的任务度,包括:
25、根据下式计算得到初始无人机的任务度:;
26、其中,表示第m个初始无人机的任务度,表示第m个初始无人机的飞行任务集中第n个飞行任务所需要的飞行时间,其中,飞行时间由飞行结束时间和飞行开始时间计算得到,表示第n个飞行任务的任务类型对应的任务度的计算权重,n表示飞行任务的数量。
27、可选地,所述任务类型包括拍照任务、摄像任务、追踪任务、自由巡查任务、货物运送任务及农药喷洒任务,且拍照任务、摄像任务的计算权重小于自由巡查任务,自由巡查任务的计算权重小于追踪任务、货物运送任务及农药喷洒任务。
28、可选地,所述利用目标检测模型与传感器集获取周围的昆虫迁飞情况,包括:
29、启动追踪无人机内置的监控设备,并利用监控设备捕捉到监控画面;
30、将监控画面作为输入数据传入至目标检测模型,得到目标检测结果,其中,目标检测结果包括有昆虫检测物和无昆虫检测物,若是有昆虫检测物,则目标检测模型会同时识别出昆虫类别及数量;
31、所述将监控画面作为输入数据传入至目标检测模型,得到目标检测结果,包括:
32、将监控画面作为输入数据传入至卷积层,在卷积层中对监控画面执行卷积操作,得到特征画面,其中,卷积操作由卷积核完成,卷积核的大小为3×3和5×5,且卷积操作的步长为2;
33、将特征画面中的所有特征数值在归一化层中执行归一化操作,得到多个特征归一值;
34、利用relu激活层中的relu函数计算每个特征归一值的relu值,得到多个relu值;
35、将多个relu值和所述监控画面输入至多级残差层中执行残差连接,重构画面;
36、对所述重构画面在池化层中执行池化操作,得到池化画面;
37、在线性变化层中,对所述池化画面中的每个像素值执行线性变化,得到多个线性变化像素;
38、将线性变化像素输入至目标检测框生成层,利用目标检测框生成层中的vgg16模型生成目标检测结果,其中,监控画面中若有昆虫检测物,则目标检测结果为昆虫检测物的昆虫检测物的检测框;
39、所述将多个relu值和所述监控画面输入至多级残差层中执行残差连接,重构画面,包括:
40、将监控画面输入至多级残差层的第一层结构中,按照顺序在第一层结构中的两层卷积层中执行卷积操作,得到残差卷积画面;
41、将残差卷积画面输入至多级残差层的第二层结构中,并在第二层的池化层中对残差卷积画面执行池化操作,得到残差池化画面;
42、将残差池化画面和多个relu值在全连接层中执行对应像素的连接后,利用relu激活层执行再次激活,得到残差激活画面;
43、利用全连接层将残差激活画面转为残差池化向量,并利用sigmoid激活层对残差池化向量执行激活操作,得到残差激活向量;
44、将残差激活向量与监控画面在融合层中执行融合操作,得到所述重构画面;
45、若目标检测结果为有昆虫检测物时,同时启动追踪无人机内置的传感器集,且传感器集包括距离传感器和高度传感器;
46、利用距离传感器和高度传感器测量追踪无人机距离昆虫检测物的距离,及追踪无人机距离地面的距离,分别得到昆虫-无人机距离和地面-无人机距离;
47、将昆虫类别、数量、昆虫-无人机距离和地面-无人机距离汇总得到昆虫迁飞情况。
48、可选地,所述根据昆虫迁飞情况分配每个追踪无人机的追踪任务,包括:
49、利用所述昆虫类别识别昆虫为有益昆虫还是有害昆虫,其中,昆虫有益或有害需要根据具体的使用场景确认;
50、去除有益昆虫的昆虫迁飞情况,得到待追踪迁飞行任务集;
51、按照昆虫-无人机距离依次对待追踪迁飞行任务集中每个待追踪迁飞行任务执行任务分配,选择昆虫-无人机距离最小的追踪无人机追踪对应的有害昆虫,得到追踪任务。
52、为实现上述目的,本发明还提供一种基于无人机追踪昆虫迁飞轨迹的系统,包括:
53、追踪轨迹指令群发模块,用于接收昆虫迁飞的追踪轨迹指令,利用中央控制单元将所述追踪轨迹指令群发至初始无人机群;
54、无人机筛选模块,用于去除初始无人机群中未接收到追踪轨迹指令的初始无人机或任务度大于任务阈值的初始无人机,得到追踪无人机群;
55、昆虫迁飞识别模块,用于启动追踪无人机群中每个追踪无人机内置的目标检测模型及传感器集,利用目标检测模型与传感器集获取周围的昆虫迁飞情况,其中,昆虫迁飞情况包括昆虫数量、类别、及距离追踪无人机的距离,所述目标检测模型的结构为:卷积层、归一化层、relu激活层、多级残差层、池化层、线性变化层及目标检测框生成层,且多级残差层先后顺序共有2层结构,第一层结构由两层卷积层组成,第二层结构由池化层、全连接层、relu激活层、全连接层、sigmoid激活层和融合层组成,其中,融合层将第一层结构的输出数据与第二层结构的输出数据执行点乘操作,目标检测框生成层由vgg模型组成;
56、昆虫迁飞可视化模块,用于根据昆虫迁飞情况分配每个追踪无人机的追踪任务,当完成追踪任务的分配后,利用每个追踪无人机执行昆虫迁飞的追踪,并实时将昆虫迁飞的追踪路径反馈至中央控制单元,在中央控制单元内汇总所有的追踪路径,并可视化得到昆虫迁飞轨迹。
57、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
58、存储器,存储至少一个指令;及
59、处理器,执行所述存储器中存储的指令以实现上述所述的基于无人机追踪昆虫迁飞轨迹的方法。
60、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的基于无人机追踪昆虫迁飞轨迹的方法。
61、本发明为解决背景技术所述问题,先接收昆虫迁飞的追踪轨迹指令,利用中央控制单元将所述追踪轨迹指令群发至初始无人机群,去除初始无人机群中未接收到追踪轨迹指令的初始无人机或任务度大于任务阈值的初始无人机,得到追踪无人机群,启动追踪无人机群中每个追踪无人机内置的目标检测模型及传感器集,利用目标检测模型与传感器集获取周围的昆虫迁飞情况,其中,昆虫迁飞情况包括昆虫数量、类别、及距离追踪无人机的距离,由于使用目标检测模型和传感器集,系统能够精确地识别周围昆虫的数量、类别以及与追踪无人机的距离,这有助于确定哪些昆虫可能对农作物造成危害,此外,进一步地,根据昆虫迁飞情况分配每个追踪无人机的追踪任务,当完成追踪任务的分配后,利用每个追踪无人机执行昆虫迁飞的追踪,并实时将昆虫迁飞的追踪路径反馈至中央控制单元,根据昆虫迁飞情况,中央控制单元可以智能地分配每个追踪无人机的任务。这意味着只有在需要时才会启动追踪,避免不必要的资源浪费。只有那些被认为可能对农作物有害的昆虫会被选择进行跟踪,追踪无人机执行实时昆虫追踪任务,同时将追踪路径实时反馈到中央控制单元。这允许农场管理人员及时了解害虫的位置和活动,以便采取必要的控制措施,最后,中央控制单元内汇总所有的追踪路径,并可视化得到昆虫迁飞轨迹,中央控制单元汇总和可视化所有的追踪路径,这使农场管理人员能够更容易地分析和理解昆虫迁飞的轨迹。这些数据可以用于优化害虫管理策略和采取定向的农药喷洒行动,从而减少农作物受害的可能性。因此本发明提出的基于无人机追踪昆虫迁飞轨迹的方法、电子设备及计算机可读存储介质,其可以减少害虫对农业种植产业造成的损失。
- 还没有人留言评论。精彩留言会获得点赞!