机器人跟随巡逻方法、装置及系统与流程
本发明涉及机器人领域,尤其涉及一种机器人跟随巡逻方法、装置及系统。
背景技术:
1、机器人跟随巡逻的核心问题是目标定位和导航,目标定位是为了让机器人知道需要跟随的目标的位置信息。
2、现有的视觉定位技术借助视觉传感器完成,机器人借助单目、双目摄像头、深度摄像机、视频信号数字化设备或基于数字信号处理(digital signal processing,dsp)的快速信号处理器等其他外部设备获取图像,进而完成定位;现有的超带宽(ultra wide band,uwb)定位技术不使用载波,使用较短的能量脉冲序列,并通过正交频分调制或直接排序将脉冲扩展到一个频率范围内,进而完成定位。
3、现有的视觉定位技术图像处理量巨大,一般计算机无法完成运算,实时性较差。现有的uwb定位技术的角度信息误差较大。
技术实现思路
1、本发明提供一种机器人跟随巡逻方法、装置及系统,用以解决现有技术中视觉定位技术图像处理量巨大,uwb定位技术的角度信息误差较大的缺陷,实现图像处理量的降低,对跟随目标的精准定位,并且让机器人能够自动适应跟随目标。
2、本发明提供一种机器人跟随巡逻方法,应用于所述机器人,所述方法包括:
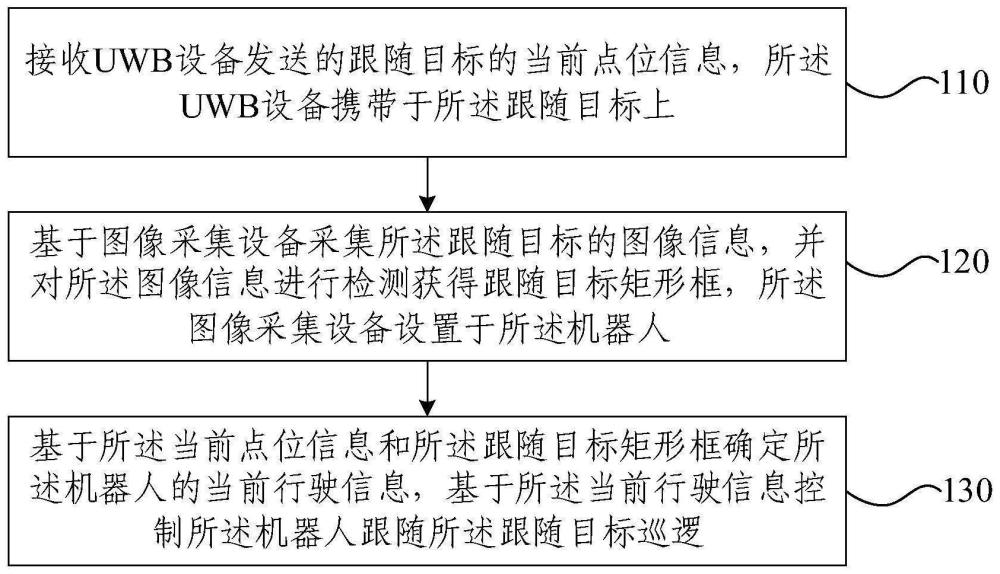
3、接收uwb设备发送的跟随目标的当前点位信息,所述uwb设备携带于所述跟随目标上,所述当前点位信息包括所述跟随目标的当前距离信息和所述跟随目标的第一角度信息;
4、基于图像采集设备采集所述跟随目标的图像信息,并对所述图像信息进行检测获得跟随目标矩形框,所述图像采集设备设置于所述机器人;
5、基于所述当前点位信息和所述跟随目标矩形框确定所述机器人的当前行驶信息,基于所述当前行驶信息控制所述机器人跟随所述跟随目标巡逻。
6、根据本发明提供的一种机器人跟随巡逻方法,所述基于所述当前点位信息和所述跟随目标矩形框确定所述机器人的当前行驶信息,包括:
7、基于所述当前点位信息和所述跟随目标矩形框确定所述跟随目标的当前第二角度信息;
8、基于所述跟随目标的当前距离信息和当前第二角度信息以及历史预设时长内的历史距离信息和历史第二角度信息确定所述跟随目标的当前速度信息;
9、基于所述跟随目标的当前距离信息、所述跟随目标的当前第二角度信息和所述跟随目标的当前速度信息更新所述跟随目标的轨迹信息;
10、基于更新的所述跟随目标的轨迹信息,以及所述机器人的当前位置信息和当前状态信息确定所述机器人的当前行驶信息。
11、根据本发明提供的一种机器人跟随巡逻方法,所述基于所述跟随目标的当前距离信息、所述跟随目标的当前第二角度信息和所述跟随目标的当前速度信息更新所述跟随目标的轨迹信息,包括:
12、基于所述跟随目标的当前距离信息、所述跟随目标的当前第二角度信息和所述跟随目标的当前速度信息更新所述跟随目标的轨迹信息,获得初始轨迹信息;
13、对所述初始轨迹信息中的感知点进行抽稀处理获得第二轨迹信息;
14、对所述第二轨迹信息进行平滑处理获得第三轨迹信息;
15、对所述第三轨迹信息中的感知点的速度信息进行滤波处理,获得更新的所述跟随目标的轨迹信息。
16、根据本发明提供的一种机器人跟随巡逻方法,所述机器人的当前行驶信息包括所述机器人的曲率信息和线速度信息;
17、所述基于更新的所述跟随目标的轨迹信息,以及所述机器人的当前位置信息和当前状态信息确定所述机器人的当前行驶信息,包括:
18、基于更新的所述跟随目标的轨迹信息,以及所述机器人的当前位置信息和当前状态信息,通过跟踪算法确定所述机器人的曲率信息;
19、基于更新的所述跟随目标的轨迹信息,以及所述机器人的当前位置信息和当前状态信息,通过自适应巡航算法确定所述机器人的线速度信息。
20、根据本发明提供的一种机器人跟随巡逻方法,所述基于所述当前行驶信息控制所述机器人跟随所述跟随目标巡逻,包括:
21、基于所述机器人的曲率信息确定所述机器人的角速度信息;
22、基于所述机器人的线速度信息和所述角速度信息控制所述机器人跟随所述跟随目标巡逻。
23、本发明还提供一种机器人跟随巡逻装置,包括:
24、接收模块,用于接收uwb设备发送的跟随目标的当前点位信息,所述uwb设备携带于所述跟随目标上,所述当前点位信息包括所述跟随目标的当前距离信息和所述跟随目标的第一角度信息;
25、采集模块,用于基于图像采集设备采集所述跟随目标的图像信息,并对所述图像信息进行检测获得跟随目标矩形框,所述图像采集设备设置于所述机器人;
26、控制模块,用于基于所述当前点位信息和所述跟随目标矩形框确定所述机器人的当前行驶信息,基于所述当前行驶信息控制所述机器人跟随所述跟随目标巡逻。
27、本发明还提供一种机器人,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述机器人跟随巡逻方法。
28、本发明还一种机器人跟随巡逻系统,包括uwb设备和所述机器人,所述uwb设备携带于跟随目标上。
29、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述机器人跟随巡逻方法。
30、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述机器人跟随巡逻方法。
31、本发明提供的一种机器人跟随巡逻方法、装置及系统,通过接收uwb设备发送的跟随目标的当前点位信息,基于图像采集设备采集跟随目标的图像信息,并对图像信息进行检测获得跟随目标矩形框;基于当前点位信息和跟随目标矩形框确定机器人的当前行驶信息,基于当前行驶信息控制机器人跟随着跟随目标巡逻,实现了uwb技术和视觉定位技术的融合,降低了图像处理量,能够对跟随目标进行精准定位,机器人在目标加速、减速或转弯等情况下都能实现跟随,并且能够自动适应速度和步伐。
技术特征:
1.一种机器人跟随巡逻方法,其特征在于,应用于所述机器人,所述方法包括:
2.根据权利要求1所述的机器人跟随巡逻方法,其特征在于,所述基于所述当前点位信息和所述跟随目标矩形框确定所述机器人的当前行驶信息,包括:
3.根据权利要求2所述的机器人跟随巡逻方法,其特征在于,所述基于所述跟随目标的当前距离信息、所述跟随目标的当前第二角度信息和所述跟随目标的当前速度信息更新所述跟随目标的轨迹信息,包括:
4.根据权利要求2所述的机器人跟随巡逻方法,其特征在于,所述机器人的当前行驶信息包括所述机器人的曲率信息和线速度信息;
5.根据权利要求4所述的机器人跟随巡逻方法,其特征在于,所述基于所述当前行驶信息控制所述机器人跟随所述跟随目标巡逻,包括:
6.一种机器人跟随巡逻装置,其特征在于,应用于所述机器人,所述装置包括:
7.一种机器人,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至5任一项所述机器人跟随巡逻方法。
8.一种机器人跟随巡逻系统,其特征在于,包括uwb设备和权利要求7所述的机器人,所述uwb设备携带于跟随目标上。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述机器人跟随巡逻方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述机器人跟随巡逻方法。
技术总结
本发明提供一种机器人跟随巡逻方法、装置及系统。该方法包括:接收UWB设备发送的跟随目标的当前点位信息,UWB设备携带于跟随目标上,当前点位信息包括跟随目标的当前距离信息和跟随目标的第一角度信息;基于图像采集设备采集跟随目标的图像信息,并对图像信息进行检测获得跟随目标矩形框,图像采集设备设置于机器人;基于当前点位信息和跟随目标矩形框确定机器人的当前行驶信息,基于当前行驶信息控制机器人跟随该跟随目标巡逻。本发明实现了UWB技术和视觉定位技术的融合,能够对跟随目标进行精准定位,机器人在目标加速、减速或转弯等情况下都能实现跟随,并且能够自动适应速度和步伐。
技术研发人员:许楠,刘成,郑利
受保护的技术使用者:中国人民解放军32398部队
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!