一种基于机器人的支架角度的控制方法、系统和机器人与流程
本技术涉及光伏发电领域,具体而言,涉及一种基于机器人的支架角度的控制方法、系统和机器人。
背景技术:
1、光伏跟踪支架的跟踪准确度是评估跟踪性能的一个重要指标。目前常用的光伏跟踪支架跟踪准确度检测方法为使用精密测量仪器,如激光测距仪或角度测量仪或特定装置,来测量光伏跟踪支架的位置和角度,用于评估跟踪支架的跟踪准确度。由于客观原因,人工检测的方法工作量大,检测效率不高。
2、随着光伏发电站规模的不断扩大,传统的手动检测方式效率明显不足。因此,自动化的跟踪支架准确度检测成为一种迫切需要的解决方案。目前市场上已经有一些通过理论计算的方式计算准确度的方法,但存在一些问题,如未考虑实际地势因素导致计算角度不准确等,单个跟踪支架的跟踪角度依然不准确,跟踪系统的发电能力未能充分发挥的问题。
技术实现思路
1、为了解决上述技术问题,本技术提供一种基于机器人的支架角度的控制方法、系统和机器人,借助智能巡检机器人,通过其检测图像和实际倾斜角,计算出当前支架的跟踪角度与最佳跟踪角度的差值,从而评估当前跟踪支架的跟踪性能,并使得跟踪支架实现精准跟踪。
2、具体的,本技术的技术方案以下:
3、第一方面,本技术公开一种基于机器人的支架角度的控制方法,由机器人执行,包括以下步骤:
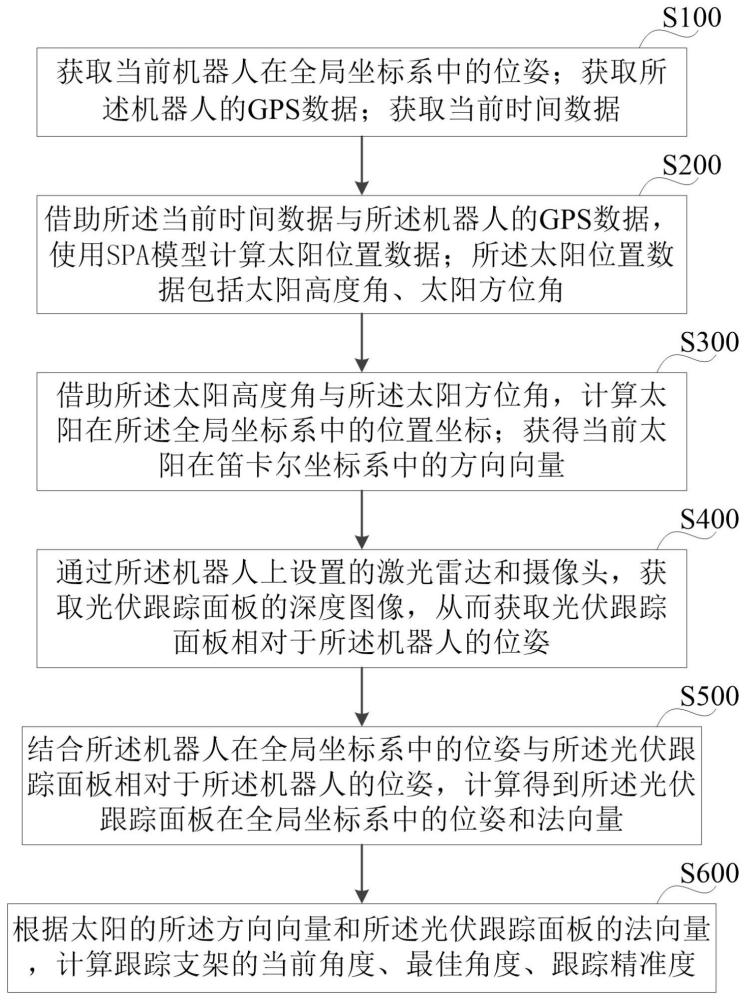
4、获取当前机器人在全局坐标系中的位姿;获取所述机器人的gps数据;获取当前时间数据;借助所述当前时间数据与所述机器人的gps数据,使用spa(spa:solarpositionalgorithm,太阳位置算法)模型计算太阳位置数据;所述太阳位置数据包括太阳高度角、太阳方位角;
5、借助所述太阳高度角与所述太阳方位角,计算太阳在所述全局坐标系中的位置坐标;将太阳在所述全局坐标系中的所述位置坐标转化到以所述机器人为基准的笛卡尔坐标系中,获得当前太阳在所述笛卡尔坐标系中的方向向量;
6、通过所述机器人上设置的激光雷达和摄像头,获取光伏跟踪面板的深度图像,从而获取所述光伏跟踪面板相对于所述机器人的位姿;
7、结合所述机器人在全局坐标系中的位姿与所述光伏跟踪面板相对于所述机器人的位姿,计算得到所述光伏跟踪面板在全局坐标系中的位姿和法向量;所述法向量表示所述光伏跟踪面板表面的朝向,用于确定所述光伏跟踪面板的最佳角度;
8、根据太阳的所述方向向量和所述光伏跟踪面板的最佳角度,所述机器人发送指令控制所述跟踪支架调整至所述最佳角度。
9、在一些实施方式中,使用坐标(x1,y1,z1)表示当前所述机器人在全局坐标系中的位置;使用(roll1,pitch1,yaw1)表示当前所述机器人在全局坐标系中的姿态;
10、使用azi代表太阳的所述方位角;使用alt代表太阳的所述高度角。
11、在一些实施方式中,使用(x,y,z)表示太阳在所述全局坐标系中的位置坐标;
12、x=cos(alt)*sin(azi)
13、y=cos(alt)*cos(azi)
14、z=sin(alt)
15、其中,azi表示太阳的所述方位角;alt表示太阳的所述高度角;
16、使用s=[s1,s2,s3]表示太阳在所述笛卡尔坐标系中的方向向量;
17、s1=x*cos(latitude)*cos(lst)-y*sin(latitude)+z*cos(latitude)*sin(lst)
18、s2=x*sin(lst)+y*cos(lst)
19、s3=-x*sin(latitude)*cos(lst)+y*sin(latitude)*sin(lst)+z*cos(latitude)
20、其中,latitude表示纬度,lst表示当地的标准时对应的时角。
21、在一些实施方式中,所述的通过所述机器人上设置的激光雷达和摄像头,获取光伏跟踪面板的深度图像,从而获取所述光伏跟踪面板相对于所述机器人的位姿,具体包括以下子步骤:
22、通过所述激光雷达和所述摄像头拍摄所述光伏跟踪面板的深度图像,对所述深度图像进行分割,获得所述深度图像中的面板区域,估计所述面板区域的法向量为(n_x,n_y,n_z);估计所述光伏跟踪面板上的一个点的坐标为(p_x,p_y,p_z);
23、根据所述深度图像的内参矩阵,使用(u,v)代表像素点坐标;将所述深度图像的深度值转换为所述摄像头坐标系下的三维坐标(x_c,y_c,z_c);
24、根据所述摄像头的外参矩阵,将所述摄像头坐标系下的点(x_c,y_c,z_c)转换为所述机器人坐标系下的点(x_g,y_g,z_g);
25、将所述光伏跟踪面板上的所述一个点的坐标(p_x,p_y,p_z)转换为所述机器人坐标系下的点(p_g_x,p_g_y,p_g_z);
26、根据所述机器人坐标系下的平面点坐标(p_g_x,p_g_y,p_g_z)和法向量(n_x,n_y,n_z),使用最小二乘法估计所述光伏跟踪面板在所述机器人坐标系下的位置(x2,y2,z2)和姿态(roll2,pitch2,yaw2)。
27、在一些实施方式中,所述的结合所述机器人在全局坐标系中的位姿与所述光伏跟踪面板相对于所述机器人的位姿,计算得到所述光伏跟踪面板在全局坐标系中的位姿和法向量,包括以下步骤:
28、使用所述机器人在所述全局坐标系中的位置(x1,y1,z1)和姿态(roll1,pitch1,yaw1),构建所述机器人的变换矩阵t_robot_global;
29、将所述光伏跟踪面板在所述机器人坐标系中的位置(x2,y2,z2)和姿态(roll2,pitch2,yaw2)转换到全局坐标系下,得到所述光伏跟踪面板在全局坐标系中的位置和姿态分别为:
30、p_global=t_robot_global*p_robot
31、r_global=t_robot_global*r_robot
32、其中,t_robot_global是所述机器人的变换矩阵;p_robot=[x2,y2,z2,1]是所述光伏跟踪面板在所述机器人坐标系中的位置向量;r_robot是所述光伏跟踪面板在所述机器人坐标系中的旋转矩阵;
33、所述光伏跟踪面板在全局坐标系中的法向量,通过所述旋转矩阵r_global的列向量来表示,选择所述旋转矩阵r_global矩阵的第三列作为所述光伏跟踪面板在全局坐标系中的法向量:n=[r_31,r_32,r_33]。
34、在一些实施方式中,通过以下公式来计算所述机器人的变换矩阵t_robot_global:
35、平移向量:translation(x1,y1,z1)=[[1,0,0,x1]
36、[0,1,0,y1]
37、[0,0,1,z1]
38、[0,0,0,1]]
39、绕x轴旋转向量:r_x=[[1,0,0,0]
40、[0,cos(roll1),-sin(roll1),0]
41、[0,sin(roll1),cos(roll1),0]
42、[0,0,0,1]]
43、绕y轴旋转向量:r_y=[[cos(pitch1),0,sin(pitch1),0]
44、[0,1,0,0]
45、[-sin(pitch1),0,cos(pitch1),0]
46、[0,0,0,1]]
47、绕z轴旋转向量:r_z=[[cos(yaw1),-sin(yaw1),0,0]
48、[sin(yaw1),cos(yaw1),0,0]
49、[0,0,1,0]
50、[0,0,0,1]]
51、旋转矩阵:rotation(roll1,pitch1,yaw1)=r_x*r_y*r_z
52、机器人变换矩阵:t_robot_global=translation(x1,y1,z1)*rotation(roll1,pitch1,yaw1)。
53、在一些实施方式中,通过以下公式来计算所述光伏跟踪面板的最佳角度θ:
54、dot_product(s,n)=s1*r_31+s2*r_32+s3*r_33
55、θ=arccos(dot_product(s,n))
56、其中,dot_product(s,n)表示太阳方向向量s和所述光伏跟踪面板法向量n的点积。
57、在一些实施方式中,所述的根据太阳的所述方向向量和所述光伏跟踪面板的最佳角度,所述机器人发送指令控制所述跟踪支架调整至所述最佳角度,还包括步骤:
58、若所述跟踪支架的当前角度不等于所述最佳角度;则发送控制指令到所述跟踪支架的控制系统从而控制所述跟踪支架的角度,以便所述跟踪支架调整到最佳角度。
59、第二方面,本技术还公开一种基于机器人的支架角度的控制系统,其特征在于,包括:
60、数据获取模块,用于获取当前机器人在全局坐标系中的位姿;获取所述机器人的gps数据;获取当前时间数据;
61、太阳定位模块,用于借助所述当前时间数据与所述机器人的gps数据,使用spa模型计算太阳位置数据;所述太阳位置数据包括太阳高度角、太阳方位角;
62、坐标转换模块,用于借助所述太阳高度角与所述太阳方位角,计算太阳在所述全局坐标系中的位置坐标;将太阳在所述全局坐标系中的所述位置坐标转化到以所述机器人为基准的笛卡尔坐标系中,获得当前太阳在所述笛卡尔坐标系中的方向向量;
63、光伏跟踪面板测量模块,用于通过所述机器人上设置的激光雷达和摄像头,获取光伏跟踪面板的深度图像,从而获取所述光伏跟踪面板相对于所述机器人的位姿;
64、位姿计算模块,用于结合所述机器人在全局坐标系中的位姿与所述光伏跟踪面板相对于所述机器人的位姿,计算得到所述光伏跟踪面板在全局坐标系中的位姿和法向量;所述法向量表示所述光伏跟踪面板表面的朝向,用于确定所述光伏跟踪面板的最佳角度;
65、角度计算模块,用于根据太阳的所述方向向量和所述光伏跟踪面板的最佳角度,所述机器人发送指令控制所述跟踪支架调整至所述最佳角度。
66、信息交互模块,用于发送控制指令到所述跟踪支架的控制系统从而控制所述跟踪支架的角度,以便所述跟踪支架调整到最佳角度。
67、第三方面,本技术还公开一种移动式光伏电站智能巡检机器人,其特征在于,其中至少包括上述实施方式中所述的一种基于机器人的支架角度的控制系统。
68、与现有技术相比,本技术至少具有以下一项有益效果:
69、1、本技术借助模型实时计算太阳的所在位置并实时计算太阳方向向量,通过机器人获得实时的光伏跟踪面板的位姿,再将机器人摄像头所拍摄的面板位置转换到全局坐标系中,不需要跟踪支架或是光伏面板向机器人反馈信息,使跟踪支架的最佳角度计算更加精准。
70、2、本技术通过摄像头坐标系、机器人坐标系和全局坐标系之间的转换,抵消了跟踪支架所在地面与水平面之间的倾角对角度计算结果的影响。在计算跟踪支架最佳角度的计算过程中不受地形影响,可以快速的评估跟踪支架的跟踪性能。
71、3、整个测量、计算、评估、调整的过程中不需要人工参与,降低了人工成本,提高了工作效率。自动化的评估和调整跟踪支架的跟踪角度,还可以实时将跟踪支架调整到最有利于发电的最佳角度,提高光伏电站的发电量。
- 还没有人留言评论。精彩留言会获得点赞!