一种无人集群对可移动目标的搜索方法
本发明涉及无人集群自动控制领域,具体涉及一种无人集群对可移动目标的搜索方法。
背景技术:
1、海上搜救任务面临搜索面积大、气象环境复杂等多种挑战,因此存在搜救效率低、响应时间长等诸多缺点。无人装置因其敏捷性,便携性和空中可达性等优点而非常适合海上巡航、搜索工作。
2、关于可移动目标无人集群搜索路线规划的研究主要包括两个方面:一是对可移动目标运动轨迹的预测和模拟,二是对搜索路径的规划算法。其中,对于目标非固定的移动特性描述一直都是相关问题研究的重点和难点,目前对于无人集群在移动目标搜索中的相关研究较为少见,还没有形成一套有效的可移动目标运动特性计算方案和路径规划方法用于解决该问题。并且对移动目标的搜索大多通过覆盖所有区域的方法进行路径规划,这使得搜索路径的规划没有考虑到目标的移动特征,使得移动目标的搜索效率过低,也没有形成一套准确、可靠的数学模型和仿真平台用于解决该问题。
技术实现思路
1、本发明提出了一种无人集群对可移动目标的搜索方法,解决了现有技术对于移动目标的搜索效率较低、没有形成一套有效的可移动目标运动特性计算方案和搜索区域分配方法的问题。
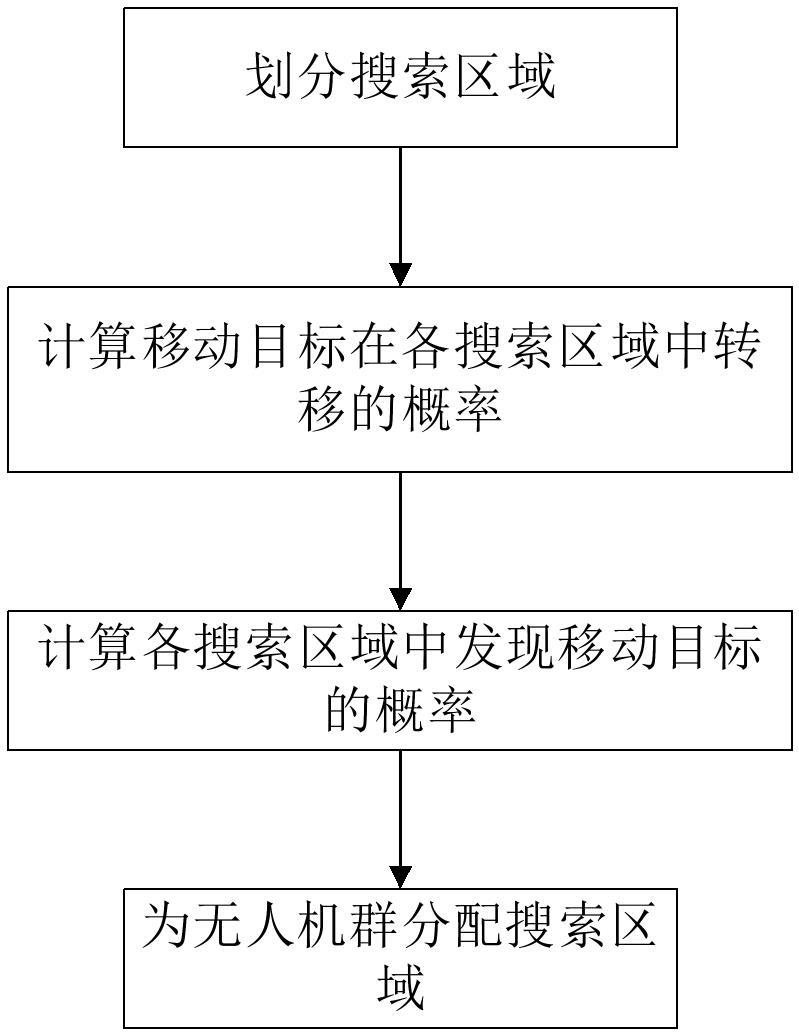
2、为解决上述技术问题,本发明提供了一种无人集群对可移动目标的搜索方法,包括以下步骤:
3、步骤s1:将搜索目标区域划分为若干个搜索区域;
4、步骤s2:获取移动目标的移动向量,采用面积法对所述移动向量进行计算,获得移动目标在各搜索区域中转移的转移概率;
5、步骤s3:对所述转移概率进行卷积计算,获取各搜索区域中发现移动目标的目标概率;
6、步骤s4:对每一个需要分配任务的无人设备,计算所述目标概率与该无人设备预计到达时间的比值,为所述无人设备指派没有被服务且所述比值最大的搜索区域。
7、优选地,步骤s2中所述移动向量包括固定移动向量y与随机移动向量s。
8、优选地,获取所述随机移动向量s的方法包括:
9、步骤s21:随机生成一个在区间内均匀分布的角度;
10、步骤s22:将所述角度应用于圆的极坐标方程,得到随机移动向量的极坐标形式;
11、步骤s23:获取移动目标在单位时间内的最大移动距离r,随机生成一个在区间内均匀分布的半径,将极坐标转换为直角坐标,得到随机移动向量的直角坐标形式。
12、优选地,步骤s23中所述随机移动向量的直角坐标形式为:
13、;
14、式中,分别为随机移动向量的横、纵坐标,。
15、优选地,步骤s2中所述移动向量的表达式为:
16、;
17、式中,分别为固定移动向量的横、纵坐标。
18、优选地,步骤s2中所述转移概率的表达式为:
19、;
20、式中,为单个搜索区域的边长,分别为搜索区域相对中心区域的横纵坐标。
21、优选地,步骤s3中所述目标概率的表达式为:
22、;
23、式中,为t时刻坐标为的搜索区域发现目标的概率。
24、优选地,步骤s3还包括概率更新部分:当t时刻有无人设备经过某搜索区域时,时刻该搜索区域中发现移动目标的概率更新为:
25、;
26、式中,为无人设备经过搜索区域时发现目标的概率系数。
27、本发明还提供一种电子设备,包括:存储器、处理器和计算机程序,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现上述任一项所述的一种无人集群对可移动目标的搜索方法。
28、本发明另外提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行以实现上述任一项所述的一种无人集群对可移动目标的搜索方法。
29、本发明的有益效果至少包括:与传统搜索路径规划算法相比,本发明中提供的方法充分考虑到移动目标的运动特征,将无人设备群及时有效的送到最需要搜索、搜索目标最有可能出现的区域,能够根据目标的移动特征自适应的调节无人设备群的搜索区域分配方案,且具有较好的搜索效果,能够提高发现目标的概率。
技术特征:
1.一种无人集群对可移动目标的搜索方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人集群对可移动目标的搜索方法,其特征在于:步骤s2中所述移动向量包括固定移动向量y与随机移动向量s。
3.根据权利要求2所述的一种无人集群对可移动目标的搜索方法,其特征在于:获取所述随机移动向量s的方法包括:
4.根据权利要求3所述的一种无人集群对可移动目标的搜索方法,其特征在于:步骤s23中所述随机移动向量的直角坐标形式为:
5.根据权利要求4所述的一种无人集群对可移动目标的搜索方法,其特征在于:步骤s2中所述移动向量的表达式为:
6.根据权利要求5所述的一种无人集群对可移动目标的搜索方法,其特征在于:步骤s2中所述转移概率的表达式为:
7.根据权利要6所述的一种无人集群对可移动目标的搜索方法,其特征在于:步骤s3中所述目标概率的表达式为:
8.根据权利要求6所述的一种无人集群对可移动目标的搜索方法,其特征在于,步骤s3还包括概率更新部分:当t时刻有无人设备经过某搜索区域时,时刻该搜索区域中发现移动目标的概率更新为:
9.一种电子设备,包括:存储器、处理器和计算机程序,其特征在于:所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现权利要求1~8任一项所述的一种无人集群对可移动目标的搜索方法。
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行以实现权利要求1~8任一项所述的一种无人集群对可移动目标的搜索方法。
技术总结
本发明提供了一种无人集群对可移动目标的搜索方法,包括以下步骤:将搜索目标区域划分为若干个搜索区域;获取移动目标的移动向量,采用面积法对所述移动向量进行计算,获得移动目标在各搜索区域中转移的转移概率;对所述转移概率进行卷积计算,获取各搜索区域中发现移动目标的目标概率;对每一个需要分配任务的无人设备,计算所述目标概率与该无人设备预计到达时间的比值,为所述无人设备指派没有被服务且所述比值最大的搜索区域。
技术研发人员:文昊林,狄鹏,陈童,胡斌,苏凯
受保护的技术使用者:中国人民解放军海军工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!