一种基于吸引流形的无人机自主导航方法
本发明涉及无人机导航和自动控制,具体涉及一种基于吸引流形的无人机自主导航方法。
背景技术:
1、无人机凭借其实时、高效的数据采集能力和灵活敏捷的机动性能,在环境监测、搜救、侦察等领域得到广泛运用。然而,由于无人机任务需求多样化和工作场景的复杂性,无人机在飞行过程面临来自环境和障碍物的威胁。
2、研究人员已经提出了用于实时感知和决策的局部导航方法,利用无人机自身传感器获取实时环境信息,并基于此进行路径规划,旨在克服全面获取环境信息的难题,以提升无人机应对动态障碍物或环境变化的自适应能力。一般而言,局部导航方法可分为人工势场方法、优化方法、几何方法和人工智能方法。其中,一些典型的代表如引导向量场方法,该方法利用复合制导向量场使飞行器能够沿着任意形状的平滑期望路径移动,即使在静态或移动障碍物遮挡的情况下也能做到。此外,还有最优互向防撞方法,将环境中其他无人机或障碍物转化为速度障碍物,以确定受控无人机的速度允许范围。然后,通过优化准则确定受控对象的最佳速度和速度方向,实现反应式局部导航。该方法基于的算法框架,并使用简单的几何方法确保无人机能够自主解决冲突。该方法已在实践中表现出良好的应用效果。然而,这些研究多采用简化的无人机模型,并未考虑无人机动力学性能约束和系统的闭环稳定性。这可能导致控制策略或参数选择不恰当,进而导致无人机控制系统不稳定,无法实现精确的飞行控制。因此,在无人机导航过程中,有必要考虑导航控制器的运动学、动力学和性能约束,以及执行器引入的惯性因素对实际无人机系统的影响。
3、解决无人机导航任务的方法之一是将其视为一个具有障碍物引起的状态约束的位置控制问题。针对这一问题,研究人员提出了一种基于高斯和高斯混合模型的机会约束线性优化方法,该方法对相对位置和速度误差进行建模,并通过模型预测控制方法有效处理控制输入和系统状态约束。此外,还有研究人员结合控制障碍函数和信息差距理论,提出了一种鲁棒且安全的控制器,用于多架无人机或无人机与障碍物之间的无碰撞轨迹规划。然而,目前大多数基于模型预测控制或控制障碍函数的优化方法在面对无人机参数或数量变化时的扩展性较低,从而限制了其适用性。因此,有必要进一步改进这些方法,提高其可扩展性,并且还需要探索其他解决方案,以便应对无人机参数或模型变化所带来的挑战。
4、综上,现有技术中存在功能不全面、不稳定状态下的飞行控制精度较低、响应速度较慢、实现难度较高、计算量以及信息需求量较多、可扩展性较低、鲁棒性较低和灵活性较低的问题。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于吸引流形的无人机自主导航方法,解决了现有技术中功能不全面、不稳定状态下的飞行控制精度较低、响应速度较慢、实现难度较高、计算量以及信息需求量较多、可扩展性较低、鲁棒性较低和灵活性较低的问题。
2、本发明提供了一种基于吸引流形的无人机自主导航方法,包括如下步骤:
3、步骤s1.设置无人机的期望轨迹,获取期望轨迹参数,结合无人机的运动学和动力学性能约束,构建无人机的吸引流形;
4、步骤s2.获取无人机与障碍物的距离信息,判断无人机与障碍物的碰撞风险并根据碰撞风险,得到期望的无人机控制系统的工作模式;
5、步骤s3.根据吸引流形和期望的无人机控制系统的工作模式,建立无人机自主导航的闭环控制系统,对无人机控制系统的参数进行设置;
6、步骤s4.构建无人机的数学模型,代入无人机自主导航的闭环控制系统求解得到无人机的控制输入,用于控制无人机避障并跟踪期望轨迹,完成自主导航任务。
7、进一步地,步骤s1具体包括:
8、步骤s1-1.设置无人机的期望轨迹,获取期望轨迹参数;其中,无人机的期望轨迹由目标点、直线以及可由方程组表示的二次曲线构成;
9、步骤s1-2.获取无人机的运动学性能约束,包括最大速度、最大加速度、最大俯仰角和最大滚转角;
10、步骤s1-3.根据无人机的期望轨迹参数和运动学性能约束构建无人机的吸引流形,包括位置流形ψtr和速度流形ψsp。
11、进一步地,步骤s1-3,位置流形ψtr和速度流形ψsp分别表示为:
12、
13、
14、其中,p是无人机的位置,φ(p,ψ,t)是无人机航向角ψ的约束函数,v是无人机的实际运动速度,a1、a2、a3、js和jt是与期望轨迹参数有关的系数矩阵,t是时间;是无人机的实际运动速度与期望运动速度的差。
15、进一步地,步骤s2具体包括:
16、步骤s2-1.获取无人机的位置信息,再通过无人机视觉传感器对障碍物进行测距处理,得到无人机与障碍物之间的距离rc,将rc与最小安全距离r进行比较,获取比较结果;
17、步骤s2-2.根据步骤s2-1的比较结果判断无人机与障碍物的碰撞风险,得到期望的无人机控制系统的工作模式;
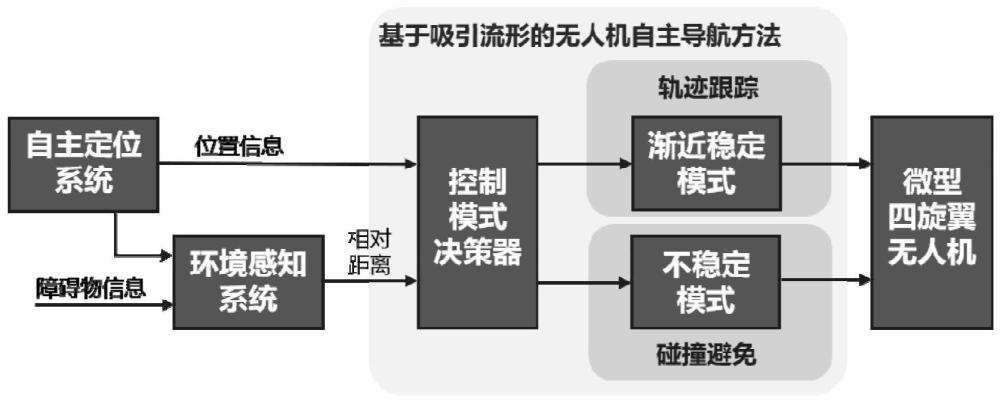
18、步骤s2-2a.若步骤s2-1的比较结果是rc>r,表明无人机与障碍物距离远,无人机与障碍物的碰撞风险低,则期望的无人机控制系统的工作模式为渐近稳定模式,用于控制无人机跟踪期望轨迹;
19、步骤s2-2b.若步骤s2-1的比较结果是rc<r,且k时刻的rc(k)小于k-1时刻的rc(k-1),表明无人机正在接近障碍物,无人机与障碍物的碰撞风险高,则期望的无人机控制系统的工作模式为不稳定模式,用于控制无人机的运动轨迹在障碍物附近向远离障碍物的方向发散,从而避免与障碍物发生碰撞;
20、步骤s2-2c.若步骤s2-1中比较的结果是rc<r,且k时刻的rc(k)大于k-1时刻的rc(k-1),表明无人机正在远离障碍物,无人机与障碍物的碰撞风险低,则期望的无人机控制系统的工作模式为渐近稳定模式,控制无人机对期望轨迹进行跟踪。
21、进一步地,步骤s2-1,无人机的位置信息通过无人机自主定位系统获取;障碍物的位置信息通过无人机环境感知系统获取。
22、进一步地,步骤s3具体包括:
23、步骤s3-1.根据无人机控制系统的工作模式,构建闭环控制系统;
24、若期望的无人机控制系统的工作模式为渐近稳定模式,则构建如下形式的闭环控制系统:
25、
26、
27、其中,t1、t2和t3分别为渐近稳定模式下的参数矩阵;
28、将t1、t2和t3都设置为正定矩阵,闭环控制系统具有渐进稳定性,将无人机控制系统的工作模式设置为渐近稳定模式;
29、若无人机控制系统的工作模式为不稳定模式,则构建如下形式的闭环控制系统:
30、ψ=ψtr+aψsp;
31、
32、其中,a和t分别为不稳定模式下的系数矩阵;将a和t都设置为负定矩阵,闭环控制系统具有不稳定性,将无人机控制系统的工作模式设置为不稳定模式;
33、当闭环控制系统具有不稳定性时,利用参数β对不稳定模式下的参数矩阵a和t进行设置,令t=a=diag(si),i=1,...,v,则有:
34、
35、
36、其中,j为无人机反应区域内的障碍物数量,s0为一个大于零的常数。
37、进一步地,步骤s4具体包括:
38、步骤s4-1.建立无人机的数学模型,用矩阵形式表示为:
39、
40、
41、
42、
43、其中,无人机在空间中的位置为p=[px py pz]t,姿态为θ=[φ θ ψ]t,其中φ、θ和ψ分别为滚转角、俯仰角和偏航角;ge为重力加速度在地球坐标系中的投影,fb是螺旋桨总拉力在机体坐标系中的投影,τ表示作用在机体轴上的力矩,j为无人机的转动惯量,ga为陀螺力矩;
44、步骤s4-2.将无人机的数学模型代入到s3-1构建的闭环控制系统中,求解得到无人机的控制输入,以此实现对无人机的运动控制;
45、步骤s4-3.重复步骤s2-1到步骤s4-2,直至无人机安全、无碰撞地完成自主导航任务。
46、与现有技术相比,本发明至少具有现如下有益效果:
47、(1)本发明的基于吸引流形的无人机自主导航方法,通过无人机根据实时检测到的自身与障碍物之间的相对距离来调整控制系统的工作模式。当无人机与障碍物的距离大于最小安全距离时,控制系统将进入渐近稳定模式,此时无人机的运动轨迹会逐渐收敛到期望路径。然而,当无人机与障碍物的距离小于安全距离时,控制系统将切换至不稳定模式,此时无人机的运动轨迹将朝着障碍物外部发散,以避免碰撞的发生。一旦碰撞风险解除,控制系统将再次切换回渐近稳定模式。本方法具备更加全面的功能,并能够同时考虑路径跟踪任务、避碰任务以及无人机的动力学特性,能够适应各种复杂环境,并提高无人机在实际运用中的安全性和可靠性。
48、(2)本发明的基于吸引流形的无人机自主导航方法,从控制系统设计的角度出发,针对无人机自主导航中的路径跟踪和避碰控制问题进行了解决;相较于基于优化的模型预测控制方法和基于几何特征的引导向量场方法,本发明提出的方法具备更快的响应速度、更低的实现难度、更小的计算量以及更少的信息需求量。
49、(3)本发明的基于吸引流形的无人机自主导航方法,通过将无人机导航中的规划和控制问题融为一体,从而使该方法具备较好的模型参数变化的适应能力,即具有可扩展性、鲁棒性和灵活性;这种一体化的设计不仅提高了系统的整体性能,同时也使得由该方法得到的无人机运动轨迹更加平滑。
- 还没有人留言评论。精彩留言会获得点赞!