驾驶控制方法、系统及计算机可读取存储介质与流程
本技术涉及自动驾驶,具体而言,涉及一种驾驶控制方法、系统及计算机可读取存储介质。
背景技术:
1、无人车的发展已经取得了显著的进展,例如agv小车能做到自动搬运、自动堆垛,自动管理。实现无人化操作,无人叉车设备可以降低劳动强度,提高工作效率,提升安全性。由于其可承载重量大,运输速度快,安全性高等特点。但目前的无人车在遇到困境(例如,运动路径受到阻碍或限制)时仍然依赖于人工干预来解决。现有的脱困方法通常缺乏主动性和自适应性,需要人工为无人车提供指导,导致车辆脱困时的自主性较差、脱困效率较低,无法适用于多种困境场景。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种驾驶控制方法、系统及计算机可读取存储介质,以改善现有技术中存在的车辆脱困效率较低的问题。
2、为了解决上述问题,第一方面,本技术提供了一种驾驶控制方法,所述方法应用于驾驶控制系统,所述系统包括:设置在载体设备上的触边装置、控制器和运动子系统;所述触边装置和所述运动子系统连接所述控制器;所述方法包括:
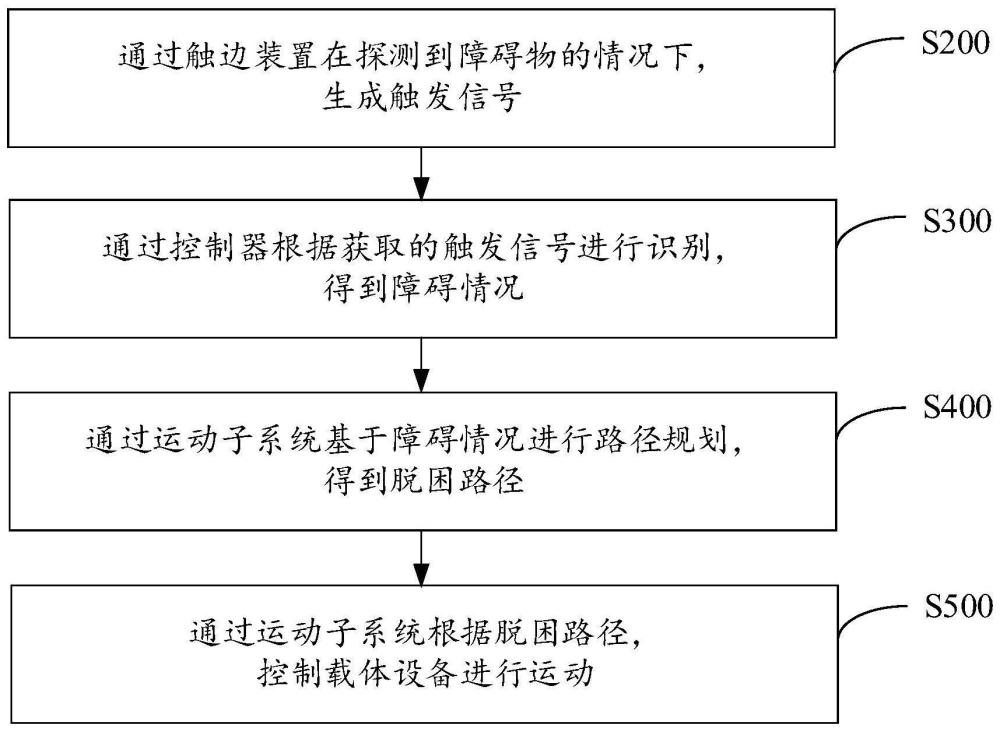
3、通过所述触边装置在探测到障碍物的情况下,生成触发信号;
4、通过所述控制器根据获取的所述触发信号进行识别,得到障碍情况;
5、通过所述运动子系统基于所述障碍情况进行路径规划,得到脱困路径;
6、通过所述运动子系统根据所述脱困路径,控制所述载体设备进行运动。
7、在上述实现过程中,通过设置的触边装置对载体设备周围的障碍物进行探测,并生成相应的触发信号,通过与触边装置连接的控制器对触发信号进行识别,以对车辆受困时的实际障碍情况进行分析,从而通过运动子系统根据障碍情况规划得到脱离的脱困路径,以基于脱困路径控制载体设备进行运动实现自动脱困处理。处理时无需人工干预,设备脱困时的自主性较强且脱困效率较高,满足用户的多种需求,适用于多种不同的驾驶场景。
8、可选地,其中,所述触边装置通过以下方式设置在所述载体设备上:
9、基于所述载体设备设置多个方位信息;
10、基于多个所述方位信息在所述载体设备的边沿区域中确定多个安装位置;
11、在每个所述安装位置上设置对应的所述触边装置。
12、在上述实现过程中,设置触边装置时,可以先根据载体设备的实际情况设置多个方位信息,以根据多个方位信息在载体设备的边沿区域上确定针对多个方位进行探测的安装位置,从而在安装位置上设置相应的触边装置,实现多角度的探测。可以根据载体设备的实际情况设置多个触边装置,以对载体设备周围的障碍物进行全方面检测,从而提高了触发信号的有效性和针对性。
13、可选地,其中,若所述触边装置的预设范围内存在所述障碍物,则压力输入所述触边装置以生成所述触发信号。
14、在上述实现过程中,触边装置能够对预设范围内的物体进行探测,从而在存在障碍物时,通过压力驶入的方式导通触边装置中设置的金属条,以生成相应的触发信号。能够准确地对物体进行探测,并在探测到障碍物时实时地生成相应的触发信号,提高了触发信号的实时性和有效性。
15、可选地,所述通过所述控制器对所述触发信号进行识别,得到障碍情况,包括:
16、通过所述控制器识别所述触发信号,得到所述触发信号对应的所述触边装置的触发方位信息;
17、通过所述控制器基于所述触发方位信息,确定所述载体设备当前的所述障碍情况。
18、在上述实现过程中,由于载体设备中设置有多个不同的触边装置,每个触边装置对应的方位也不相同。因此,为了对障碍物的位置等进行确定,可以通过与所有触边装置连接的控制器对触发信号进行识别,以确定触发信号是从哪个触边装置中发出,从而确定发出信号的触边装置所对应的方位信息作为触发方位信息,能够根据触发方位信息确定载体设备当前所遇到的障碍物的障碍情况。可以根据触发信号对障碍物的方位、位置等实际情况进行解析,以确定载体设备当前所遇困境的障碍情况,无需人工对障碍情况进行查看和分析,能够自动检测障碍情况并针对障碍情况实现自动脱困处理。
19、可选地,所述方法还包括:
20、若所述控制器识别到的所述触发方位信息包含全部所述方位信息,则通过所述运动子系统生成第一报警信息;
21、通过所述运动子系统向监控端发送所述第一报警信息;其中,所述第一报警信息用于指示介入处理。
22、在上述实现过程中,若控制器识别到的触发方位信息包括所有触边装置的方位信息,即载体设备上所有的触边装置都表征检测到了相应的障碍物,则可能存在无法进行自动脱困或检测异常的异常情况。为了对异常情况进行解决,可以由运动子系统生成对这一异常情况进行提示的第一报警信息,并将第一报警信息发送至监控端,以指示监控端对异常情况进行介入处理。能够在检测异常或困境异常的情况下生成相应的报警信息进行处理,从而有效地解决驾驶过程中遇到的多种异常情况,进一步地提高了脱困处理的效率。
23、可选地,所述通过所述运动子系统根据所述脱困路径,控制所述载体设备进行运动,包括:
24、通过所述运动子系统获取所述载体设备的传感信息;
25、通过所述运动子系统根据所述脱困路径和所述传感信息生成运动指令;其中,所述运动指令包括:制动指令、速度指令和转向指令;
26、通过所述运动子系统基于所述运动指令,控制所述载体设备进行运动。
27、在上述实现过程中,运动子系统可以获取载体设备的传感信息,以结合脱困路径和传感信息确定逃离困境区域的运动指令,从而基于运动指令控制载体设备进行运动,以驶离困境区域,实现自动脱困处理。能够结合载体设备的实际情况确定相应的指令,以对载体设备进行控制,有效地提高了脱困处理时的效率和有效性。
28、可选地,所述方法还包括:
29、若超过预设时长后,所述载体设备未驶离所述障碍物,则通过所述运动子系统生成第二报警信息;
30、通过所述运动子系统向监控端发送所述第二报警信息;其中,所述第二报警信息用于指示介入处理。
31、在上述实现过程中,可以设置预设时长作为载体设备是否脱困的限定时长,以对载体设备是否正常脱困进行判定。超过预设时长后,若载体设备仍未驶离障碍物,则表征载体设备没有正常脱困,存在脱困异常情况,可以由运动子系统生成相应的第二报警信息,并将第二报警信息发送至监控端,以指示监控端对脱困异常情况进行介入处理。能够在驶离障碍物异常的情况下生成相应的报警信息进行处理,从而有效地解决脱离过程中遇到的多种异常情况,进一步地提高了脱困处理的有效性。
32、第二方面,本技术实施例还提供了一种驾驶控制系统,所述系统包括:设置在载体设备上的触边装置、控制器和运动子系统;所述触边装置和所述运动子系统连接所述控制器;
33、所述触边装置用于在探测到障碍物的情况下,生成触发信号;
34、所述控制器用于根据获取的所述触发信号进行识别,得到障碍情况;
35、所述运动子系统用于基于所述障碍情况进行路径规划,得到脱困路径;根据所述脱困路径,控制所述载体设备进行运动。
36、在上述实现过程中,通过设置的触边装置对载体设备周围的障碍物进行探测,并生成相应的触发信号,通过与触边装置连接的控制器对触发信号进行识别,以对车辆受困时的实际障碍情况进行分析,从而通过运动子系统根据障碍情况规划得到脱离的脱困路径,以基于脱困路径控制载体设备进行运动实现自动脱困处理。
37、可选地,所述控制器具体用于:识别所述触发信号,得到所述触发信号对应的所述触边装置的触发方位信息;基于所述触发方位信息确定所述载体设备当前的所述障碍情况。
38、在上述实现过程中,通过设置控制器对触发信号进行解析,以确定发出信号的触边装置所对应的方位信息作为触发方位信息,能够根据触发方位信息确定载体设备当前所遇到的障碍物的障碍情况。
39、第四方面,本技术实施例还提供了一种计算机可读取存储介质,所述可读取存储介质中存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行上述驾驶控制方法中任一实现方式中的步骤。
40、综上所述,本技术实施例提供了一种驾驶控制方法、系统及计算机可读取存储介质,通过对触发信号进行识别以对车辆受困时的实际障碍情况进行分析,从而根据障碍情况规划得到脱离的脱困路径,无需人工干预,能够自动实现脱困,脱困时的自主性较强且脱困效率较高,满足用户的多种需求。
- 还没有人留言评论。精彩留言会获得点赞!