车辆控制模式切换方法、装置、云端以及存储介质与流程
本技术涉及车辆控制,尤其涉及一种车辆控制模式切换方法、装置、云端以及存储介质。
背景技术:
1、相关技术中,对于自卸车、装载机、挖掘机等类型的车辆,驾驶员可以通过远程控制平台对其运行状态进行监控,以便于车辆在执行将炉渣转运到自卸车、破碎或者分拣等车辆任务时,驾驶员可以将车辆的控制模式切换为人为控制,并通过远程控制平台控制车辆执行上述车辆任务,当车辆完成上述车辆任务时,执行倒渣等车辆任务时,此时驾驶员可以将车辆的控制模式切换为自主控制,由车辆的车载主机利用循迹行驶技术控制车辆自动运行。
2、由于需要监管人员时刻关注车辆的运行状况,以便于及时切换车辆的控制模式,因此当监管人力有限时,则无法及时切换车辆的控制模式,从而影响车辆作业的连续性。
技术实现思路
1、本技术的主要目的在于提供一种车辆控制模式切换方法、装置、云端以及存储介质,旨在解决人为切换车辆的控制模式会影响车辆作业的连续性的技术问题。
2、为实现上述目的,本技术提供一种车辆控制模式切换方法,包括:
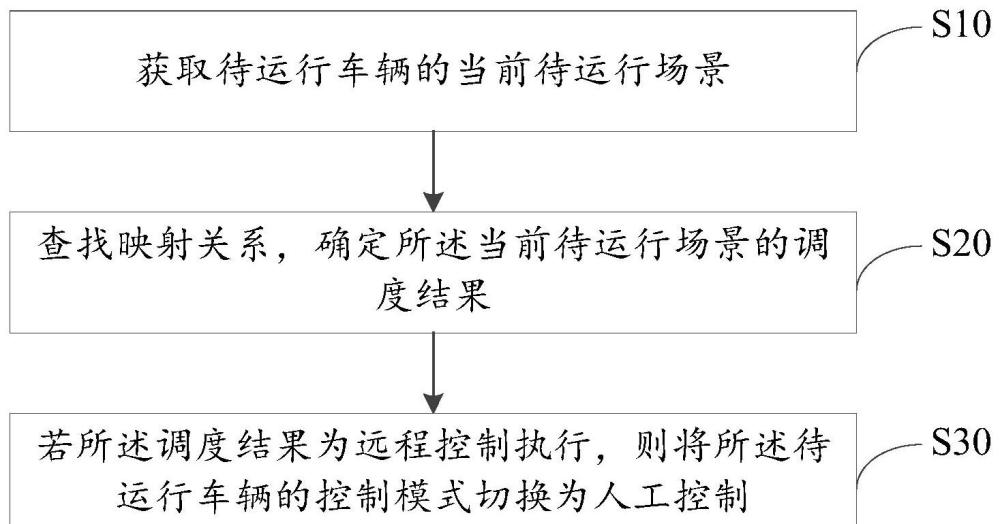
3、获取待运行车辆的当前待运行场景;
4、查找映射关系,确定所述当前待运行场景的调度结果;其中,所述映射关系包括运行场景以及调度结果之间的对应关系,所述调度结果为可自动执行或者远程控制执行;
5、若所述调度结果为远程控制执行,则将所述待运行车辆的控制模式切换为人工控制。
6、可选地,所述若所述调度结果为远程控制执行,则将所述待运行车辆的控制模式切换为人工控制之后,所述方法还包括:
7、获取待运行车辆的车辆信息以及当前车辆任务;其中,所述车辆信息包括车辆识别号和车辆类型;
8、基于所述车辆信息,从至少一个空闲状态的空闲远程控制平台中确定出目标远程控制平台;
9、发送所述车辆信息以及所述当前车辆任务至所述目标远程控制平台,以使所述目标远程控制平台基于所述车辆信息连接所述待运行车辆,展示所述当前车辆任务,驾驶员基于所述当前车辆任务通过目标远程控制平台控制所述待运行车辆执行所述当前车辆任务。
10、可选地,所述云端存储有驾驶员与远程控制平台之间的对应关系以及驾驶员信息,驾驶员信息包括驾驶员擅长车型、驾驶员控制所述待运行车辆次数或者驾驶员连续工作时长中至少一者;
11、所述基于所述车辆信息,从至少一个空闲状态的远程控制平台中确定出目标远程控制平台,包括:
12、从多个远程控制平台中,确定出当前状态为空闲状态的至少一个空闲远程控制平台;
13、基于所述车辆信息以及与各所述空闲远程控制平台对应的驾驶员信息,计算待运行车辆与所述驾驶员之间的匹配度;
14、将多个匹配度中的最大值对应的驾驶员作为目标驾驶员;
15、基于所述目标驾驶员,确定所述目标远程控制平台。
16、可选地,所述发送所述车辆信息以及所述当前车辆任务至所述目标远程控制平台,以使所述目标远程控制平台基于所述车辆信息连接所述待运行车辆,展示所述当前车辆任务,驾驶员基于所述当前车辆任务通过目标远程控制平台控制所述待运行车辆执行所述当前车辆任务之后,所述方法还包括:
17、发送所述车辆信息以及所述当前车辆任务至所述目标远程控制平台,以使所述目标远程控制平台基于所述车辆信息连接所述待运行车辆,展示所述当前车辆任务,驾驶员基于所述当前车辆任务通过目标远程控制平台控制所述待运行车辆执行所述当前车辆任务,并在执行完所述当前车辆任务后,发送任务完成信息至所述云端;
18、接收所述任务完成信息,并将所述目标远程控制平台的当前状态修改为空闲状态。
19、可选地,所述发送所述车辆信息以及所述当前车辆任务至所述目标远程控制平台,以使所述目标远程控制平台基于所述车辆信息连接所述待运行车辆,展示所述当前车辆任务,驾驶员基于所述当前车辆任务通过目标远程控制平台控制所述待运行车辆执行所述当前车辆任务,包括:
20、发送所述车辆信息及所述当前车辆任务至所述目标远程控制平台,以使目标远程控制平台基于所述车辆信息连接所述待运行车辆,获取待运行车辆的当前运行环境,展示所述当前运行环境以及所述当前车辆任务,驾驶员基于所述当前运行环境以及所述当前车辆任务通过目标远程控制平台控制所述待运行车辆执行所述当前车辆任务。
21、可选地,所述查找映射关系,确定所述当前待运行场景的调度结果之后,所述方法还包括:
22、若所述待运行车辆的调度结果为可自动执行,则发送当前车辆任务至所述待运行车辆的车载主机,以使所述车载主机控制所述待运行车辆自动执行所述当前车辆任务。
23、可选地,所述若所述待运行车辆的调度结果为可自动执行,则发送所述当前车辆任务至所述待运行车辆的车载主机,以使所述车载主机控制所述待运行车辆自动执行所述当前车辆任务之后,所述方法还包括:
24、若所述待运行车辆的调度结果为可自动执行,则发送当前车辆任务至所述待运行车辆的车载主机,以使所述车载主机控制所述待运行车辆自动执行所述当前车辆任务,并在完成所述当前车辆任务后,发送任务完成信息至所述云端;
25、接收所述任务完成信息;
26、判断所述待运行车辆是否存在未完成的车辆任务;
27、若所述待运行车辆存在未完成的车辆任务,则获取未完成的车辆任务对应的目标运行场景;
28、查找所述映射关系,确定所述目标运行场景的目标调度结果。
29、第二方面,本技术提供一种车辆控制模式切换装置,所述装置包括:
30、获取模块,用于获取待运行车辆的当前待运行场景;
31、确定模块,用于查找映射关系,确定所述当前待运行场景的调度结果;其中,所述映射关系包括运行场景以及调度结果之间的对应关系,所述调度结果为可自动执行或者远程控制执行;
32、切换模块,用于若所述调度结果为远程控制执行,则将所述待运行车辆的控制模式切换为人工控制。
33、第三方面,本技术提供一种云端,包括:处理器,存储器以及存储在所述存储器中的车辆控制程序,所述车辆控制程序被所述处理器运行时实现如上任一项所述车辆控制模式切换方法的步骤
34、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆控制模式切换程序,所述车辆控制模式切换程序被处理器执行时实现如上任一项所述的车辆控制模式切换方法。
35、本技术实施例提出的一种车辆控制模式切换方法,获取待运行车辆的当前待运行场景;查找映射关系,确定所述当前待运行场景的调度结果;其中,所述映射关系包括运行场景以及调度结果之间的对应关系,所述调度结果为可自动执行或者远程控制执行;若所述调度结果为远程控制执行,则将所述待运行车辆的控制模式切换为人工控制。相较于现有技术中,通过人为确定何时切换待运行车辆的控制模式,本实施例通过云端基于待运行车辆的当前待运行场景对应的调度结果,适应性的切换不同的控制模式,通过对控制模式的智能切换,保障了待运行车辆执行车辆任务的连续性,进一步提供了生产效率。
- 还没有人留言评论。精彩留言会获得点赞!