基于投影控制器的多智能体分布式平面编队控制方法
本发明属于多智能体协同控制领域,更具体地,涉及一种基于投影控制器的多智能体分布式平面编队控制方法。
背景技术:
1、多智能体编队控制是指通过控制多个智能体的行为,使它们能够在空间中形成一定的编队,并在行进过程中始终保持编队队形稳定。相较于集中式编队,分布式编队能够更加灵活、智能、高效地应对外界变化与扰动,更具应用价值。
2、传统的分布式编队控制方法分为以下几种。基于距离控制器与刚性图理论结合的分布式编队方法,这种方法仅能保证局部收敛稳定性,对于随机初始位置的多智能体集群缺少有效的初始编队生成。基于相对位移的一致性分布式编队方法,该方法要求每个智能体坐标系方向是对齐的,在通信约束受限的情况下实施困难。采用基于距离控制器结合避碰控制器的方法,可以解决以上两种方法存在的问题,但是,该方法仅限于正三角形编队,对于其他编队队形并不适用,可能会造成不收敛或队形歧义的情况。在基于距离的刚性编队控制方法中引入角度控制可以避免翻转歧义,或者,通过增加边数量形成全局刚性编队来避免翻转歧义,但由于引入额外的控制变量(角度或者边),使得控制规律复杂且增加了通信代价不易在实际应用中实施。
3、综上,在每个智能体自身坐标系方向不一致情况下,如何在不增加控制器复杂程度的基础上,实现不同多智能体初始位置下的稳定可靠分布式编队以避免翻转歧义,具有重要研究意义。除此之外,目前的二维分布式编队控制方法也极少关注遭到蓄意攻击导致智能体故障时的编队修复问题。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种基于投影控制器的多智能体分布式平面编队控制方法,其目的在于在不增加控制器复杂程度的基础上,实现不同多智能体初始位置下的稳定可靠分布式编队以避免翻转歧义,尤其是每个智能体自身坐标系方向不一致情况。
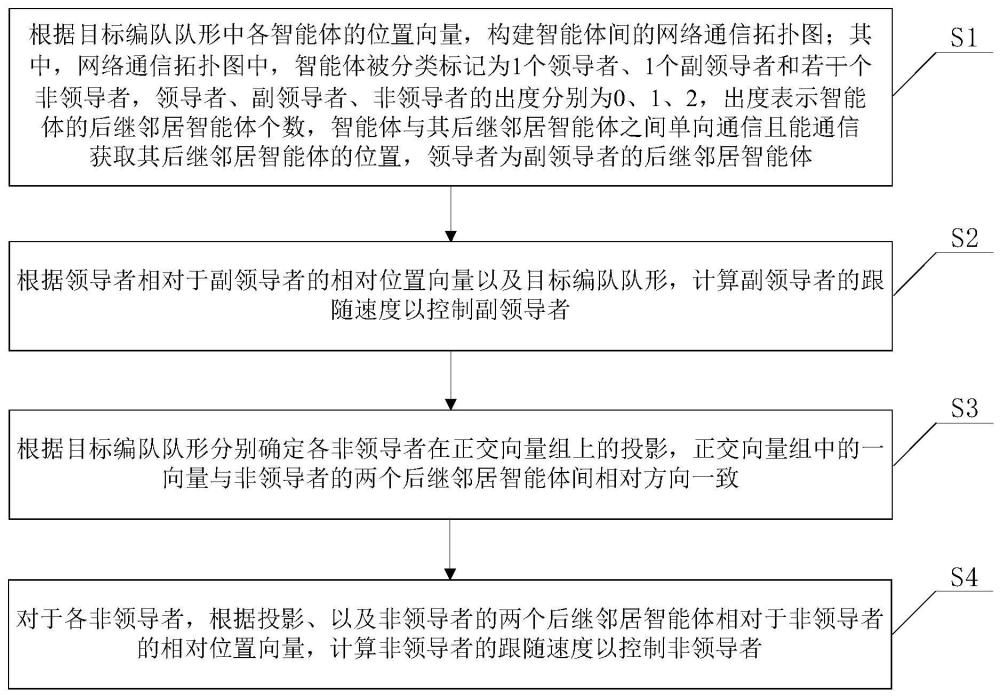
2、为实现上述目的,按照本发明的一个方面,提供了一种基于投影控制器的多智能体分布式平面编队控制方法,包括:根据目标编队队形中各智能体的位置向量,构建智能体间的网络通信拓扑图;其中,所述网络通信拓扑图中,智能体被分类标记为1个领导者、1个副领导者和若干个非领导者,领导者、副领导者、非领导者的出度分别为0、1、2,出度表示智能体的后继邻居智能体个数,智能体与其后继邻居智能体之间单向通信且能通信获取其后继邻居智能体的位置,领导者为副领导者的后继邻居智能体;根据所述领导者相对于所述副领导者的相对位置向量以及所述目标编队队形,计算所述副领导者的跟随速度以控制所述副领导者;根据所述目标编队队形分别确定各所述非领导者在正交向量组上的投影,所述正交向量组中的一向量与所述非领导者的两个后继邻居智能体间相对方向一致;对于各所述非领导者,根据所述投影、以及所述非领导者的两个后继邻居智能体相对于所述非领导者的相对位置向量,计算所述非领导者的跟随速度以控制所述非领导者。
3、更进一步地,所述副领导者的编队位置控制器的形式为:
4、
5、d=||x1*-x2*||
6、其中,为所述副领导者的跟随速度,x1为领导者的当前位置向量,x2为副领导者的当前位置向量,c为设定正实参数,d为目标编队队形中领导者和副领导者之间的期望距离,x1*为领导者在目标编队队形中的位置向量,x2*为副领导者在所述目标编队队形中的位置向量,||•||表示取向量的2-范数。
7、更进一步地,所述非领导者的编队位置控制器的形式为:
8、
9、
10、
11、
12、
13、其中,为非领导者i的跟随速度,xi为非领导者i的当前位置向量,xj、xk分别为非领导者i的两个后继邻居智能体j、k的当前位置向量,为k相对j的单位相对方向向量,xi*为非领导者i在目标编队队形中的位置向量,xj*、xk*分别为j、k在目标编队队形中的位置向量,s1为目标编队队形中非领导者i在第一向量上的投影,所述第一向量与k相对于j的相对位置向量方向一致,s2为目标编队队形中非领导者i在第二向量上的投影,所述第二向量由所述第一向量逆时针旋转90度得到,c为设定正实参数,r为旋转矩阵,||•||表示取向量的2-范数。
14、更进一步地,所述构建智能体间的网络通信拓扑图,具体包括:根据目标编队队形中各智能体的位置向量,生成以所述智能体为节点的初始三角剖分图;选择一个智能体作为领导者,在所述初始三角剖分图中选择一个包含所述领导者的初始三角形,指定所述初始三角形中的另一智能体为副领导者,有向化所述初始三角形的边,使得领导者、副领导者的出度分别为0、1,并标记所述初始三角形中的节点;遍历所有未标记节点,若未标记节点在所述初始三角剖分图中存在两个及以上的已标记邻居节点,任取两个已标记邻居节点与所述未标记节点的连边进行有向化,已标记节点为未标记节点的后继邻居,标记所述未标记节点,直至所有节点已标记;删除所述初始三角剖分图中未有向化的边,得到所述网络通信拓扑图。
15、更进一步地,当有智能体发生故障时,所述方法还包括:根据发生故障的智能体的分类,删除发生故障的智能体并构建新的网络通信拓扑图;根据新的网络通信拓扑图以及所述目标编队队形,控制无故障的智能体。
16、更进一步地,当发生故障的智能体为领导者时:删除所述领导者及其连接的有向边,将副领导者变为新的领导者,将与删除的领导者以及新的领导者均有向连接的非领导者变为新的副领导者;将与删除的领导者有向连接的非领导者新增一条指向新的领导者或新的副领导者的非重复有向边,得到新的网络通信拓扑图。
17、更进一步地,当发生故障的智能体为副领导者时:删除所述副领导者及其连接的有向边,将与领导者以及删除的副领导者均有向连接的非领导者变为新的副领导者;将与删除的副领导者有向连接的非领导者新增一条指向领导者或新的副领导者的非重复有向边,得到新的网络通信拓扑图。
18、更进一步地,当发生故障的智能体为非领导者时:获取发生故障的智能体的所有前继邻居智能体集合v1和后继邻居智能体集合v2;遍历前继邻居智能体集合v1中的每个智能体v1j,从后继邻居智能体集合v2中搜索v1j的一个非邻居智能体v2j,以v1j为起点、指向v2j的有向边;删除发生故障的智能体及其连接的有向边,得到新的网络通信拓扑图。
19、按照本发明的另一个方面,提供了一种基于投影控制器的多智能体分布式平面编队控制系统,包括:处理器;存储器,其存储有计算机可执行程序,所述程序在被所述处理器执行时,使得所述处理器执行如上所述的基于投影控制器的多智能体分布式平面编队控制方法。
20、按照本发明的另一个方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上所述的基于投影控制器的多智能体分布式平面编队控制方法。
21、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
22、(1)提供了一种基于投影控制器的多智能体分布式平面编队控制方法,设计各智能体的出度均不大于2,构建得到了具有最小有向通信信道数量的持久网络通信拓扑图,且智能体间仅需单向通信以获取相对位置信息,可以保证在各智能体坐标系方向不对齐情况下仍能保持编队队形稳定;
23、对每个智能体,按照领导者、副领导者、非领导者分类设计控制自身运动的分布式控制器,为非领导者设计投影控制器,投影控制器中设计的与特定正交向量组投影,保留了平移旋转不变性的优点,因此,也适用于智能体坐标系方向不对齐的情况,且该控制器未引入额外的控制变量,在不增加控制器复杂程度的基础上,实现不同多智能体初始位置下的稳定可靠分布式编队以避免翻转歧义,实现可靠稳定的控制;
24、(2)当智能体突然发生无法修复故障时,将通信网络中故障智能体对应的顶点以及连边进行删除,并在局部新增尽可能少的有向连边,使得重构后网络通信拓扑依然具有持久性,保证重构后编队稳定性和抗扰性不会因为节点移除而减弱,实现多智能体系统的可靠稳定移动。
- 还没有人留言评论。精彩留言会获得点赞!