一种多足机器人控制系统
本发明涉及多足机器人,特别涉及一种多足机器人控制系统。
背景技术:
1、多足机器人是一种具有多个腿或足部的机器人,通常被设计成模仿动物的行走方式,例如昆虫、爬行动物或四足动物,多足机器人的设计旨在提高其在复杂和不规则环境中的移动能力和稳定性,使其能够穿越不同类型的地形和应对各种挑战。但是确定多足机器人如何移动每一条腿以实现稳定的步态是一个关键问题,即步态规划需要考虑多个因素,以确保机器人不会失去平衡。
技术实现思路
1、为了解决以上问题,本发明提供了一种多足机器人控制系统。
2、为实现上述目的,本发明所采用的技术方案如下:
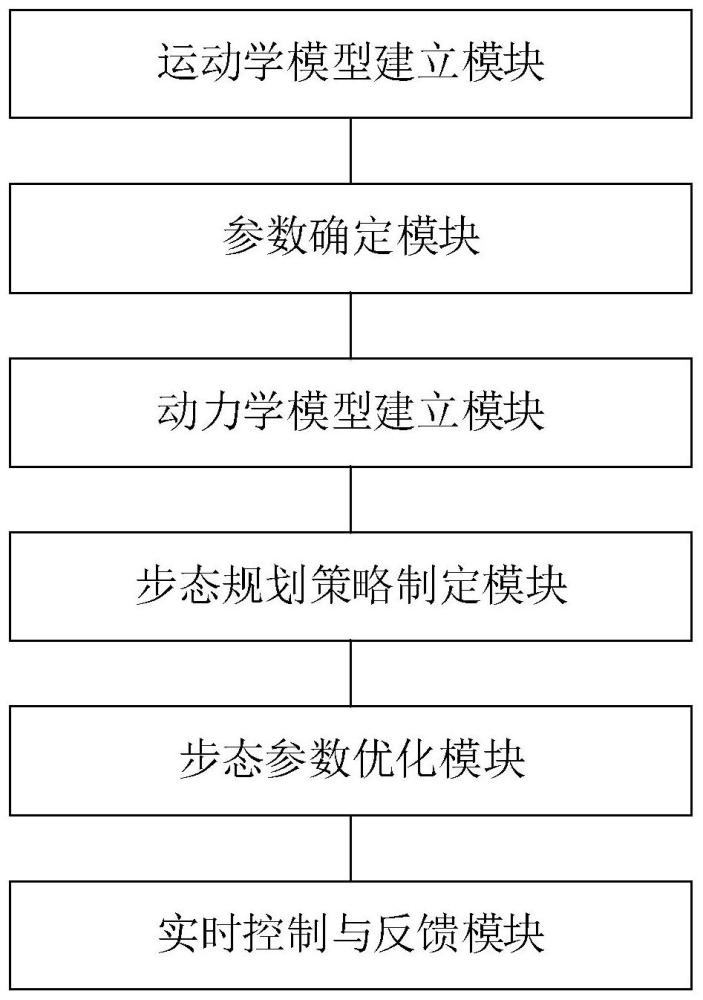
3、一种多足机器人控制系统,包括:
4、运动学模型建立模块:建立多足机器人的运动学模型,确定每个腿的关节和链接长度,以及腿部的初始位置和末端效应器的目标位置;
5、参数确定模块:识别影响步态的参数,包括腿部长度、关节范围、地形特性;
6、动力学模型建立模块:建立多足机器人的动力学模型,包括质量、惯性和关节扭矩参数;
7、步态规划策略制定模块:制定步态规划策略,包括确定步态周期、步态相位、步态参数以及腿部轨迹;
8、步态参数优化模块:调整步态参数以最大化稳定性指标和速度指标;
9、实时控制与反馈模块:实时监测机器人的状态,包括传感器数据和关节位置。
10、进一步的:所述运动学模型建立模块包括:
11、定义多足机器人的结构,包括每个腿的关节数目、关节类型以及每个关节的位置和连接方式;
12、为机器人的每个关节和腿部末端设置坐标系;
13、为每个关节和腿部末端定义运动学参数,包括关节角度、坐标系之间的转换矩阵、关节长度;
14、建立正运动学模型,以用于计算每个腿部末端的位置和姿态,给定关节角度,正运动学模型表示为:
15、ti=ti-1·ai
16、其中,ti是腿部末端的变换矩阵,ti-1是前一个关节的变换矩阵,ai是由关节角度和坐标系之间的转换矩阵构成的矩阵;
17、建立逆运动学模型,以用于确定关节角度,以便机器人的末端效应器到达特定的目标位置和姿态,逆运动学模型表示为:
18、f(q)=x-p
19、其中,f(q)是机器人的正运动学方程,x是目标末端位置和姿态,p是当前末端位置和姿态,q是关节角度。
20、进一步的:所述参数确定模块包括:
21、定义与多足机器人步态的参数范围,包括腿部长度、关节范围、地形特性;
22、确定一个或多个性能指标,以评估步态的质量,指标包括机器人的稳定性、速度、能源效率,性能指标用以下公式表示:
23、性能指标=f(关键参数)
24、其中,f是性能指标的函数,关键参数是运动学模型建立模块中定义的参数;
25、通过数值方法,对每个关键参数进行敏感性分析,以确定参数对性能指标的影响程度,通过以下步骤实现:选择一个初始参数值,确定性能指标的基准值;逐个改变每个关键参数的值,保持其他参数不变,重新计算性能指标;计算每个参数的变化对性能指标的影响;
26、确定参数对于性能指标的影响最为显著;
27、通过分析参数组合的效应,以确定不同参数之间的协同影响;
28、基于关键参数和参数相互作用的分析,寻找最佳的参数组合,以优化步态的性能。
29、进一步的:所述动力学模型建立模块包括:
30、确定多足机器人的物理结构,包括每个腿的关节数目、质量分布、关节的类型以及每个关节的坐标系位置;
31、为每个关节和质点定义坐标系,以便建立运动方程;
32、建立多足机器人的动力学模型,动力学模型通常使用以下方程表示:
33、运动方程:用于描述机器人的运动学和动力学,表示为:
34、
35、其中m(q)是质量矩阵,是科里奥利力/离心力矩阵,g(q)是重力矩阵,τ是关节扭矩,q是关节角度,是关节角速度,是关节角加速度;
36、动力学方程:使用牛顿-欧拉方程表示:
37、f=ma
38、其中f是总力,m是质点或连杆的质量,a是加速度;
39、确定每个质点的质量、惯性张量以及每个关节的关联参数;
40、将建立的运动方程转化为计算机程序,使用数值方法求解,以获得机器人在不同状态下的运动学和动力学响应;
41、验证建立的动力学模型,通过模拟机器人在不同条件下的运动,以确保模型的准确性。
42、进一步的:所述步态规划策略制定模块包括:
43、确定多足机器人期望的步态周期;
44、将步态周期分成多个相位,每个相位代表步态中的不同阶段,确定每个腿的相位差,以确保其在不同时间执行不同的步态动作;
45、定义关键的步态参数,以决定机器人的行走方式;
46、使用所选的步态参数和步态相位,计算每个腿的轨迹,包括腿部末端的位置和姿态,使用以下公式生成腿部轨迹:
47、对于步态周期t和相位π:
48、位置:
49、高度:
50、旋转:
51、其中,a、b和c是振幅,根据步态参数进行调整,t是时间,t是步态周期,是步态相位;
52、确保每个腿的相位差以便在不同时间执行相应的步态动作,以便腿部在正确的相位进行运动;
53、实时控制机器人的腿部运动,以便根据步态规划策略进行移动。
54、进一步的:所述步态参数优化模块包括:
55、确定优化的目标函数,以评估步态的性能;
56、定义需要进行优化的步态参数作为优化变量
57、将目标函数和约束条件编程实现,以便优化算法能够进行数值优化;
58、运行优化算法以寻找最佳的步态参数组合,在每次迭代中,算法将评估目标函数并更新参数,直到满足终止条件;
59、分析优化的结果,确定哪组步态参数能够最大化机器人的性能指标;
60、将优化后的步态参数应用到多足机器人的实时控制中,以实现稳定的步行行为。
61、进一步的:所述实时控制与反馈模块包括:
62、获取传感器数据;
63、使用比例-积分-微分(pid)控制算法,配置pid控制器的参数,包括比例增益kp、积分增益ki和微分增益kd;
64、在机器人运行时,实时读取传感器数据,包括关节角度、姿态、位置和速度,使用pid控制算法计算每个关节的控制输入,以调整关节扭矩,以维持所需的步态和稳定性,控制输入使用如下公式计算:
65、
66、其中,τi是关节i的控制输入,kp,ki,kd是pid控制器的增益,ei是关节角度的误差,dt是时间间隔;
67、连续监测机器人的状态,并实时调整控制输入,以保持所需的步态和稳定性。
68、本发明与现有技术相比,所取得的技术进步在于:
69、本发明允许用户轻松调整多个步态参数,包括步长、步高、速度等,以适应不同的环境和任务,这种高度可定制性有助于多足机器人更好地适应不同工作场景,例如不平坦地形、障碍物等,通过实时控制和反馈机制,机器人能够调整步态以维持稳定性,降低摔倒的风险。
70、通过对关键参数的敏感性分析,本发明有助于识别哪些参数对机器人性能最为关键,从而降低了设计和维护成本,不必盲目地进行试验和调整,可以更高效地设计机器人,通过优化步态参数,可以最大程度地提高多足机器人的能源效率,这对于延长机器人的续航时间或减小电池消耗至关重要,特别是在长时间运行或离线环境中。
71、总的来说,本发明通过优化步态规划、适应复杂环境、定制性能等方面的优势,可以显著提高多足机器人的实用性和性能,这对于多个应用领域,包括救援、勘探、军事和生产等,都具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!