重载机器人自适应阻抗控制器的建模方法及控制方法
本发明属于重载机器人,尤其涉及一种重载机器人自适应阻抗控制器的建模方法及控制方法。
背景技术:
1、渗透,随着其使用时间的增加,拉索表面pe层容易老化和外力作用而出现严重损伤,使内部钢丝束腐蚀,甚至出现断丝。定期检测桥梁拉索的覆盖层机械损伤、内部钢丝绳腐蚀和断裂对桥梁维护至关重要。近几十年来,对研究斜拉索检查和维护攀爬机器人的开发受到广泛的关注。攀爬机器人的运动方式有轮式、腿式和蠕动式等。湖北工业大学研制的了一种可径向平衡调整的履带式斜拉索机器人,解决了目前斜拉桥采取人工检测与修复的搭载机器笨重、效率低下的问题,降低了检测人员的劳动强度与危险性,加强了可靠性。其技术方案申请号为申请号202210410026.8公布了一种可径向平衡调整的履带式斜拉索机器人。但是,该缆索检测维护机器人可携带负载较小且越障能力差。
2、传统缆索检测机器人可携带最大负载为20kg左右,当所需要携带的设备较重时,需要与斜拉索之间的摩擦力也更大,过大的摩擦力会导致缆索表面pe层的磨损。然而,现有的检测设备,如能对缆索内部裂纹损伤进行检测的漏磁(mfl)传感器,其远远超出了现有技术中的缆索检测机器人的负载能力范围。即使通过增加电机数量的方式去增加机器人的驱动力,使其达到超过可携带的负载,但是,机器人与缆索间的摩擦力也会增大,会导致缆索表面pe层的磨损的问题,而不便使用与推广。另外,在大负载牵引时,由于机器人与缆索间的摩擦力较大,其越障能力也会变得很差,导致机器人运行不稳定且对于高空斜拉索的检测变得更加困难以及检测耗费的时间变长。
技术实现思路
1、本发明的目的在于提供一种载机器人自适应阻抗控制器的建模方法及控制方法,提供了一种爬升速度快、负载能力大且稳定爬升的重载检测机器人,该重载机器人可用于携带90kg及以上的检测装置,提供的控制方法实现对机器人的运动轨迹的稳定控制。采用的技术方案如下:
2、一种重载机器人自适应阻抗控制器的建模方法,包括以下步骤:
3、步骤1、引入坐标系,建立重载机器人的参数化模型m0,其中:
4、m0中,将重载机器人建模为一个在二维平面运动的刚体;在机器人攀爬过程中,具有两个独立的电机来驱动两个绞盘,两个绞盘驱动转动角速度分别设定为w1和w2;
5、xoay为局部坐标系,xoey为全局坐标系;
6、在全局坐标系下,定义机器人质心位置坐标[xb yb βb]t作为机器人实际的位置;
7、定义[xa ya βa]t作为机器人绞盘轴中心坐标;
8、e-机器人质心p到绞盘轴中心q的距离,l-绞盘的轴距,p-机器人的质心,q-绞盘轴中心;-从坐标系oe到坐标系oa的旋转矩阵;
9、步骤2、基于m0,建立重载机器人的运动学和速度力学模型m1,具体包括以步骤:
10、其中,m1为:
11、
12、
13、
14、
15、
16、步骤2a、求解t时刻的机器人绞盘轴中心q运动方程,具体包括:
17、机器人可视为在局部坐标系的平面上移动,描述机器人笛卡尔坐标系,即全局坐标系下位置和偏角的方程组为:
18、
19、
20、
21、
22、其中,v-机器人的线速度,w-机器人的角速度;
23、步骤2b、求解机器人的线速度和角速度、分别与驱动绞盘的关系式:
24、
25、
26、步骤2c、在笛卡尔坐标系下机器人质心位置和绞盘轴中心存在如下关系:
27、
28、步骤2d、将步骤2a中的公式带入步骤2c,获取笛卡尔坐标系下重载机器人质心位置的运动学方程:
29、
30、步骤2e、建立包含机器人的实际线速度v、实际角速度w、参考线速度vc和角速度wc的方程,具体包括以下步骤:
31、步骤2e1、建立机器人的力和力矩平衡方程:
32、
33、
34、其中,f1和f2分别是绞盘驱动的驱动力,f=f1+f2为重载机器人前进的驱动力;
35、m为机器人主体框架的重量,m为力矩,i为机器人的转动惯量;
36、步骤2e2、引入驱动绞盘扭矩模型:
37、τ1=ka(v1-kbw1)/ra;
38、τ2=ka(v2-kbw2)/ra;
39、其中,τ1-机器人左电机输出扭矩和传动比的乘积;
40、τ2-机器人右电机输出扭矩和传动比的乘积;
41、v1和v2是施加到左右绞盘的输入电压,ka-电机转矩常数和齿轮转动比的乘积;
42、kb-电压常数和传动比的乘积,ra-电阻常数;
43、步骤2e3、引入驱动绞盘的动力学方程:
44、
45、
46、其中,ie-驱动绞盘的转动惯量,be-驱动绞盘的粘滞摩擦系数;
47、步骤2e4、引入包含机器人实际线速度v、实际角速度w、参考线速度vc和角速度wc的方程:
48、
49、其中:
50、ul=(v1+v2)/2;
51、ur=(v1-v2)//2;
52、其中,kp-比例增益,kd-微分增益;
53、笛卡尔坐标系下,取机器人参考位姿为[xc yc βc]t;
54、步骤2f、结合步骤2b、步骤2d、步骤2e1、步骤2e2、步骤2e3、步骤2e4,获取m1;
55、步骤3、对m1线性化处理,获取重载机器人的运动学和速度力学模型m11,具体包括以下步骤:
56、其中,m11为:
57、uc=c-1[j-1(va-a)-b];
58、步骤3a、为了将m1的输入输出反馈线性化,定义机器人实际位置为s=[xb yb]t,通过重载机器人动力学模型可得到如下:
59、
60、
61、
62、
63、
64、
65、其中,s-位移,q-机器人的角位移,j-机器人的雅克比矩阵;
66、uc=[vc wc]t是机器人的速度参考;
67、是机器人的速度矢量;
68、步骤3b、对线性化:
69、uc=c-1[j-1(va-a)-b];
70、
71、步骤4、建立笛卡尔坐标系下v的控制规律模型m2,具体包括以下步骤:
72、其中,m2为:
73、
74、步骤4a、简化阻抗模型,以获取当机器人末端在接触空间运动时的阻抗模型,其中:
75、阻抗模型为:
76、
77、当机器人末端在接触空间运动时的阻抗模型为:
78、
79、其中,e=fq-f,md,bd,和kd分别表示机器人惯性系数,阻尼系数和刚度系数;
80、r-实际位置;rq-期望位置;f-当前绞盘驱动力;fq-期望绞盘驱动力;
81、步骤4b、设计自适应阻抗控制模型:
82、
83、
84、其中,ε根据fq而改变,rd=rq-r;
85、η为改变系数,为正数,λ为控制系统采样时间;
86、步骤4c、将步骤4b中的第二个公式带入第一个公式,获取自适应控制微分方程:
87、
88、步骤4d、简化步骤4c中的方程,并移项得:
89、
90、f=ke(r-re)=-kerd;
91、步骤4e、由实际接触力公式f=ke(r-re)可得:
92、
93、
94、
95、由rd=re-r则可表示为:
96、
97、
98、
99、对含有不确定性的环境位置可以表示为:
100、r′d=rd+δre;
101、
102、
103、
104、步骤4f、将步骤4e中的公式带入步骤4d,可得:
105、
106、步骤4g、化简步骤4f,可得:
107、
108、令e=fq-f可得到:
109、
110、步骤4h、将4b中的公式变形,并令ε初始值为零:
111、bdε(t-λ)=bdε(t-(k-1)λ)+ηe(t-(k-2)λ)+…+ηe(t-2λ);
112、bdε(t-(k-1)λ)=0;
113、步骤4i、基于步骤4h,简化步骤4g中的第二个公式,可得:
114、
115、步骤4j、简化步骤4i中的公式,可得:
116、
117、令fe=keδre,eq=fq-fe;
118、步骤4k、对步骤4j中的公式进行拉普拉斯变换,可得:
119、mde(s)s2+bde(s)s+kee(s)+keη(e-(k-2)λse(s)+…+e-2λse(s)+e-λse(s))=mdeq(s)s2-bdeq(s)s
120、
121、步骤4l、当传递函数含有延时λ的采样时间时,系统的稳定性方程的特征方程可表示为:
122、mds2+bds+ke+keη(e-(k-2)λs+…+e-2λs+e-λs)=0;
123、步骤4m、因为系统的采样频率不大,在一段时间内,k会变成一个很大的值趋向于无穷,但若当0<λ<1,则步骤4l中分母括号内的级数可表示为:
124、
125、步骤4n、将步骤4m中的公式带入步骤4l,并简化,可得:
126、
127、e-λs=1-λs;
128、
129、λmds3+λbds2+λke(1-η)s+keη=0;
130、
131、步骤5、将m2带入m11,获取自适应阻抗控制器:
132、
133、优选地,步骤2f具体包括以下步骤:
134、步骤2f1、将步骤2b中公式带入步骤2d中公式,可得到:
135、
136、步骤2f2、基于公式步骤2e2、2e3和2e4中公式可得到:
137、
138、
139、步骤2f3、基于步骤2b、2e1、2f1、2f2可推导出m1;
140、其中,2e1中的公式用于表示和步骤2b中的公式用于消去w1和w2。
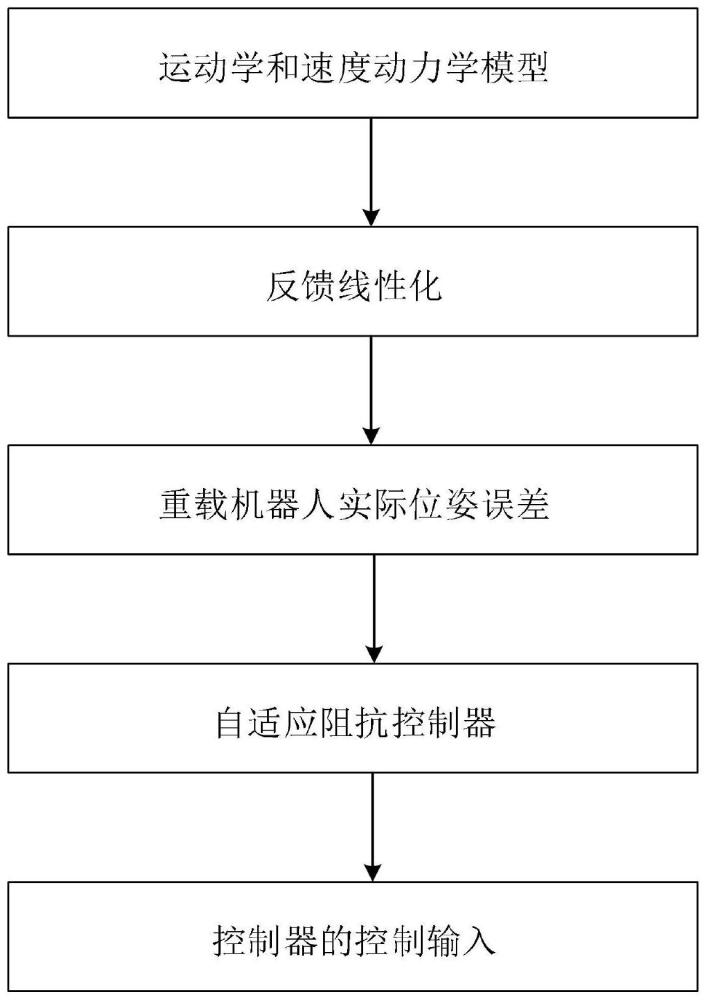
141、一种重载机器人自适应控制方法,包括以下步骤:
142、步骤1、根据机器人建立动力学和运动学模型,然后反馈线性化得到一个公式
143、步骤2、根据设计的自适应阻抗设计控制器,计算系统稳定的参数范围;
144、步骤3、将自适应阻抗的公式和反馈线性化的公式结合得到控制器;
145、步骤4、通过输入机器人位姿和目标位姿,得到两者之间的轨迹误差.通过对机器人运动学模型和动力学模型进行建模分析,然后结合自适应阻抗控制器,从而实现移动机器人在柔顺攀爬过程中的闭环控制。
146、与现有技术相比,本发明的优点为:利用自适应阻抗控制原理,设计控制器,进一步确定控制输入,即可实现期望运动轨迹和实际运动轨迹误差值趋于零,实现对机器人的稳定控制。
- 还没有人留言评论。精彩留言会获得点赞!