基于感知地理位置的巡检机器人任务自动切换方法与系统与流程
本发明涉及电力巡检,更具体的,涉及一种基于感知地理位置的巡检机器人任务自动切换方法与系统。
背景技术:
1、随着两个一流建设的不断发展,以“信息化、数字化、自动化、互动化”为特征的智能电网建设逐渐深入,变电站智能巡检机器人进入了推广应用阶段。
2、其中,巡检机器人的表计读取对比分析、恶劣天气巡视等功能,有效地提升了变电站巡检效率和效益,减轻了基层班组一线员工的工作负担,但是巡检机器人在工作是仍然缺少合理的时间、空间控制,不能够自动切换白天与黑夜的巡检任务,需要改进。
技术实现思路
1、本发明的目的是提供一种基于感知地理位置的巡检机器人任务自动切换方法与系统,无需外部网络,无需人工干预,即可实现巡检机器人特定任务的自动切换,对于执行跨地域长距离的巡检任务,仍可精确感知当前位置的日出/日落时刻以及天黑/天亮时刻,有益于合理控制巡检机器人的巡检任务。
2、本发明第一方面提供了一种基于感知地理位置的巡检机器人任务自动切换方法,包括以下步骤:
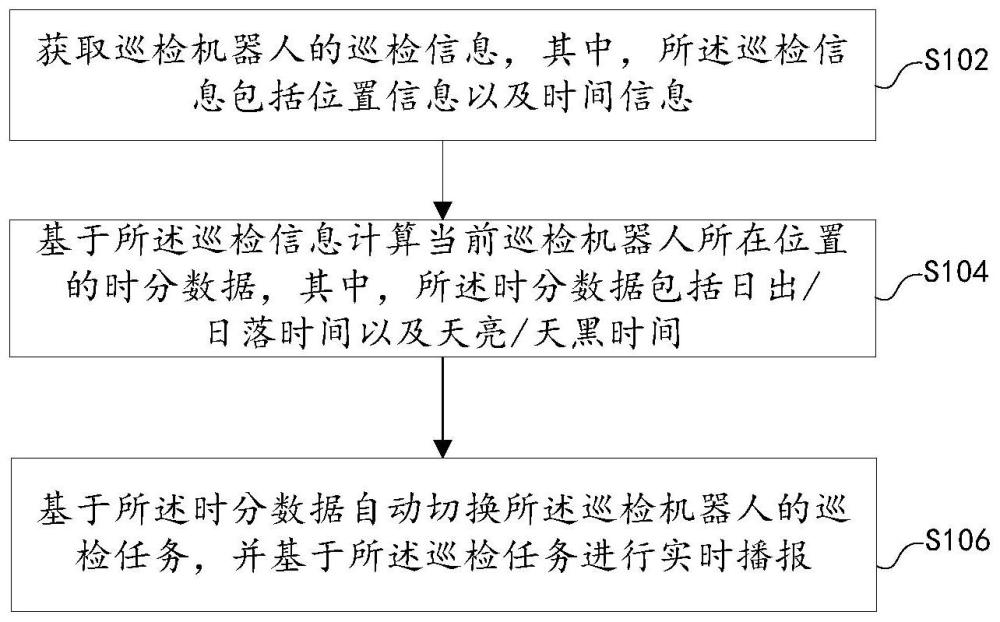
3、获取巡检机器人的巡检信息,其中,所述巡检信息包括位置信息以及时间信息;
4、基于所述巡检信息计算当前巡检机器人所在位置的时分数据,其中,所述时分数据包括日出/日落时间以及天亮/天黑时间;
5、基于所述时分数据自动切换所述巡检机器人的巡检任务,并基于所述巡检任务进行实时播报。
6、本方案中,所述获取巡检机器人的巡检信息,具体包括:
7、获取所述巡检机器人的定位信号,其中,所述定位信号包括gps信号和/或北斗定位信号;
8、基于所述定位信息获取所述巡检机器人所在位置的经纬度信息,基于所述经纬度信息得到所述位置信息;
9、基于所述定位信息获取所述巡检机器人当前的时间值,所述时间值包括具体时间以及具体日期;
10、基于所述时间值得到所述时间信息,其中,所述巡检机器人上装配有卫星授时设备。
11、本方案中,所述基于所述巡检信息计算当前巡检机器人所在位置的时分数据,具体包括:
12、基于所述经纬度信息以及所述时间信息计算当前所述巡检机器人所在位置的太阳与地球的角度参数;
13、基于所述角度参数结合所述位置信息得到所述时分数据,其中,基于所述时分数据获取当前所述巡检机器人所在的时分区域。
14、本方案中,所述基于所述时分数据自动切换所述巡检机器人的巡检任务,具体包括:
15、获取当前所述巡检机器人的配置任务清单;
16、基于所述配置任务清单结合所述时分数据计算不同时刻的切换信息;
17、基于所述切换信息自动切换所述巡检机器人的巡检任务。
18、本方案中,所述方法还包括:
19、基于所述时分区域进行数据共享,其中,
20、若其他巡检机器人进入所述时分区域时,基于共享的所述时分数据自动切换所述其他巡检机器人的巡检任务。
21、本方案中,所述方法还包括:
22、获取所述巡检机器人的当前执行任务;
23、基于所述当前执行任务与实时播报任务进行比对,其中,
24、若所述当前执行任务与所述实时播报任务不一致,则输出告警提醒;
25、若所述当前执行任务与所述实时播报任务一致,则输出匹配提醒。
26、本发明第二方面还提供一种基于感知地理位置的巡检机器人任务自动切换系统,包括存储器和处理器,所述存储器中包括基于感知地理位置的巡检机器人任务自动切换方法程序,所述基于感知地理位置的巡检机器人任务自动切换方法程序被所述处理器执行时实现如下步骤:
27、获取巡检机器人的巡检信息,其中,所述巡检信息包括位置信息以及时间信息;
28、基于所述巡检信息计算当前巡检机器人所在位置的时分数据,其中,所述时分数据包括日出/日落时间以及天亮/天黑时间;
29、基于所述时分数据自动切换所述巡检机器人的巡检任务,并基于所述巡检任务进行实时播报。
30、本方案中,所述获取巡检机器人的巡检信息,具体包括:
31、获取所述巡检机器人的定位信号,其中,所述定位信号包括gps信号和/或北斗定位信号;
32、基于所述定位信息获取所述巡检机器人所在位置的经纬度信息,基于所述经纬度信息得到所述位置信息;
33、基于所述定位信息获取所述巡检机器人当前的时间值,所述时间值包括具体时间以及具体日期;
34、基于所述时间值得到所述时间信息,其中,所述巡检机器人上装配有卫星授时设备。
35、本方案中,所述基于所述巡检信息计算当前巡检机器人所在位置的时分数据,具体包括:
36、基于所述经纬度信息以及所述时间信息计算当前所述巡检机器人所在位置的太阳与地球的角度参数;
37、基于所述角度参数结合所述位置信息得到所述时分数据,其中,基于所述时分数据获取当前所述巡检机器人所在的时分区域。
38、本方案中,所述基于所述时分数据自动切换所述巡检机器人的巡检任务,具体包括:
39、获取当前所述巡检机器人的配置任务清单;
40、基于所述配置任务清单结合所述时分数据计算不同时刻的切换信息;
41、基于所述切换信息自动切换所述巡检机器人的巡检任务。
42、本方案中,所述方法还包括:
43、基于所述时分区域进行数据共享,其中,
44、若其他巡检机器人进入所述时分区域时,基于共享的所述时分数据自动切换所述其他巡检机器人的巡检任务。
45、本方案中,所述方法还包括:
46、获取所述巡检机器人的当前执行任务;
47、基于所述当前执行任务与实时播报任务进行比对,其中,
48、若所述当前执行任务与所述实时播报任务不一致,则输出告警提醒;
49、若所述当前执行任务与所述实时播报任务一致,则输出匹配提醒。
50、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括机器的一种基于感知地理位置的巡检机器人任务自动切换方法程序,所述基于感知地理位置的巡检机器人任务自动切换方法程序被处理器执行时,实现如上述任一项所述的一种基于感知地理位置的巡检机器人任务自动切换方法的步骤。
51、本发明公开的一种基于感知地理位置的巡检机器人任务自动切换方法与系统,无需外部网络,无需人工干预,即可实现巡检机器人特定任务的自动切换,对于执行跨地域长距离的巡检任务,仍可精确感知当前位置的日出/日落时刻以及天黑/天亮时刻,有益于合理控制巡检机器人的巡检任务。
技术特征:
1.一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,所述获取巡检机器人的巡检信息,具体包括:
3.根据权利要求2所述的一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,所述基于所述巡检信息计算当前巡检机器人所在位置的时分数据,具体包括:
4.根据权利要求3所述的一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,所述基于所述时分数据自动切换所述巡检机器人的巡检任务,具体包括:
5.根据权利要求4所述的一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的一种基于感知地理位置的巡检机器人任务自动切换方法,其特征在于,所述方法还包括:
7.一种基于感知地理位置的巡检机器人任务自动切换系统,其特征在于,包括存储器和处理器,所述存储器中包括基于感知地理位置的巡检机器人任务自动切换方法程序,所述基于感知地理位置的巡检机器人任务自动切换方法程序被所述处理器执行时实现如下步骤:
8.根据权利要求7所述的一种基于感知地理位置的巡检机器人任务自动切换系统,其特征在于,所述获取巡检机器人的巡检信息,具体包括:
9.根据权利要求8所述的一种基于感知地理位置的巡检机器人任务自动切换系统,其特征在于,所述基于所述巡检信息计算当前巡检机器人所在位置的时分数据,具体包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括一种基于感知地理位置的巡检机器人任务自动切换方法程序,所述基于感知地理位置的巡检机器人任务自动切换方法程序被处理器执行时,实现如权利要求1至6中任一项所述的一种基于感知地理位置的巡检机器人任务自动切换方法的步骤。
技术总结
本发明公开的一种基于感知地理位置的巡检机器人任务自动切换方法与系统,其中方法包括:获取巡检机器人的巡检信息,其中,所述巡检信息包括位置信息以及时间信息;基于所述巡检信息计算当前巡检机器人所在位置的时分数据,其中,所述时分数据包括日出/日落时间以及天亮/天黑时间;基于所述时分数据自动切换所述巡检机器人的巡检任务,并基于所述巡检任务进行实时播报。本发明无需外部网络,无需人工干预,即可实现巡检机器人特定任务的自动切换,对于执行跨地域长距离的巡检任务,仍可精确感知当前位置的日出/日落时刻以及天黑/天亮时刻,有益于合理控制巡检机器人的巡检任务。
技术研发人员:骆培笙,柏林,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!