一种工程机械行驶路径跟踪控制方法及装置与流程
本申请涉及路径规划,具体涉及一种工程机械行驶路径跟踪控制方法及装置。
背景技术:
1、装载机由前、后车体两部分构成,两个车体之间通过铰接点和摆动环相连,利用液压执行机构使前、后车体相对偏转实现整车的转向。这种结构形式,减小轮式装载机的转向半径,提高整车的机动性能,使其对作业环境具有良好的适应能力,然而,这种转向机构引入了高度非线性动力学,目前的动力学模型均是乘用车的运动学模型,而乘用车与装载机运动方式不同,直接采用乘用车的运动学模型预测装载机的行驶轨迹,将导致预测准确率较低,影响装载机的工作效率。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种工程机械行驶路径跟踪控制方法及装置,可以提高装载机的行驶轨迹的预测准确率。
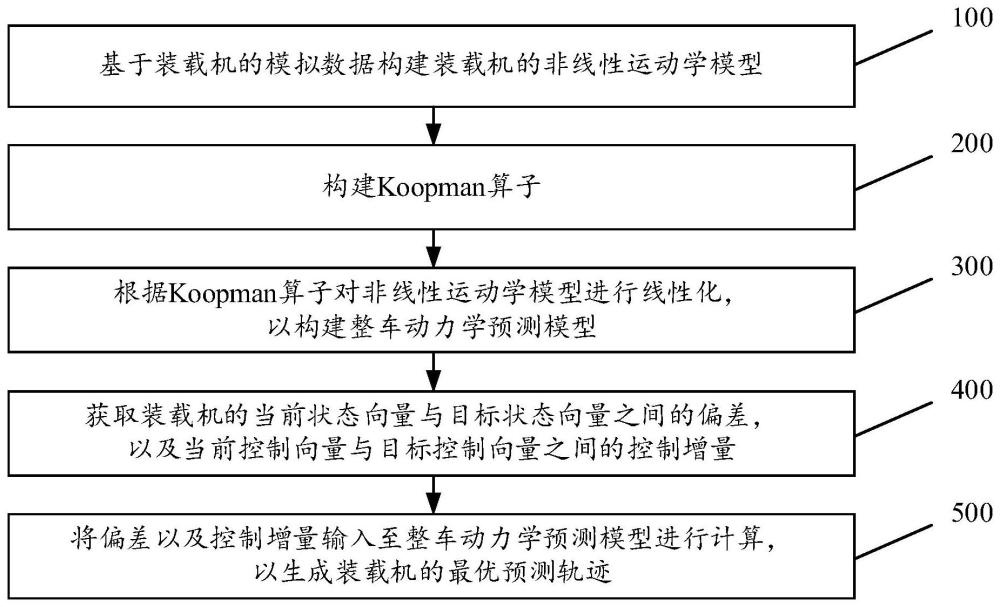
2、根据本申请的一个方面,提供了一种工程机械行驶路径跟踪控制方法,包括:基于装载机的模拟数据构建装载机的非线性运动学模型;构建koopman算子;根据所述koopman算子对所述非线性运动学模型进行线性化,以构建整车动力学预测模型;获取所述装载机的当前状态向量与目标状态向量之间的偏差,以及当前控制向量与目标控制向量之间的控制增量;将所述偏差以及所述控制增量输入至所述整车动力学预测模型进行计算,以生成所述装载机的最优预测轨迹。
3、在一实施例中,所述构建koopman算子,包括:构建koopman算子作用于xk+1=f(xk,uk)所表示的空间如下:其中,xk+1=f(xk,uk)为非线性运动学模型改写的离散时间非线性系统;其中k为koopman算子,ψ为状态向量和控制向量的标量函数,h(xk,uk)是将输入在时间上向前传播的函数;以及用递归最小二乘法计算koopman算子;其中,所述koopman算子用于定义标量函数ψ在时间上的观测函数。
4、在一实施例中,用递归最小二乘法计算koopman算子,包括:获取多个时刻的轨迹数据,所述轨迹数据包括一个时刻时的状态向量和控制向量;根据多个时刻的轨迹数据以及所述观测函数的向量ψ,可确定所述观测函数的过去值和未来值,其中,所述观测函数的未来值与所述观测函数的过去值之间的关系式为:yf=kyp+ξ;其中,yf为观测函数的未来值,k为koopman算子,yp为观测函数的过去值,其中ξ为近似误差;基于所述观测函数的未来值与所述观测函数的过去值之间的关系式,通过最小二乘法确定近似误差值最小时的k为所述koopman算子。
5、在一实施例中,所述koopman算子为:其中,yf为观测函数的未来值,yp为观测函数的过去值,为moore-pensose伪逆。
6、在一实施例中,在构建koopman算子之后,所述工程机械行驶路径跟踪控制方法还包括:基于带遗忘因子的递归最小二乘算法,对所述koopman算子进行更新。
7、在一实施例中,基于带遗忘因子的递归最小二乘算法,对所述koopman算子进行更新,包括:基于所述koopman算子计算当前时刻的算子的近似值,所述当前时刻的算子的近似值为:其中,yf为观测函数的未来值,yp为观测函数的过去值;γk=(ypypt)-1;根据修正向量、遗忘因子λ以及γk计算γk+1;根据当前时刻的轨迹数据以及下一时刻的轨迹数据,编写观测函数的新未来值以及所述观测函数的新过去值;以及基于γk+1、观测函数的新未来值、所述观测函数的新过去值更新所述koopman算子。
8、在一实施例中,所述遗忘因子λ为:0.9<λ<0.995。
9、在一实施例中,根据所述koopman算子对所述非线性运动学模型进行线性化,以构建整车动力学预测模型,包括:基于所述非线性运动学模型以及所述koopman算子,确定观测值向量;基于所述观测值向量以及所述koopman算子计算所述koopman算子对于所述观测值向量的作用关系式;以及根据所述作用关系式构建观测值向量之间的线性关系式;以及以所述线性关系式构建所述整车动力学预测模型。
10、在一实施例中,基于装载机的模拟数据构建装载机的非线性运动学模型,包括:建立所述装载机的行驶运动学方程;确定所述装载机在模拟任务时的模拟状态向量以及模拟控制向量;根据所述装载机的移动方向选择状态表示,并根据所述模拟状态向量、所述模拟控制向量以及所述行驶运动学方程,确定非线性运动学模型。
11、根据本申请的另一个方面,提供了一种工程机械行驶路径跟踪控制装置,包括:第一构建模块,用于基于装载机的模拟数据构建装载机的非线性运动学模型;第二构建模块,用于构建koopman算子;线性化模块,用于根据所述koopman算子对所述非线性运动学模型进行线性化,以构建整车动力学预测模型;获取模块,用于获取所述装载机的当前状态向量与目标状态向量之间的偏差,以及当前控制向量与目标控制向量之间的控制增量;计算模块,用于将所述偏差以及所述控制增量输入至所述整车动力学预测模型进行计算,以生成所述装载机的最优预测轨迹。
12、本申请提供的工程机械行驶路径跟踪控制方法及装置,基于koopman理论将非线性运动学模型进行线性化,以构建整车动力学预测模型。非线性运动学模型可以适应装载机的结构,而将非线性运动学模型线性化可以解决非线性系统的控制问题,线性化模型可通过模型预测控制获得系统的控制输入,也就是实现系统控制。koopman理论和模型预测控制结合,为非线性系统设计一个线性模型预测控制,从而对装载机的轨迹进行预测,并通过控制增量、偏差提高模型预测控制的准确度,以实现更精确的控制和响应,从而生成装载机的最优预测轨迹。
技术特征:
1.一种工程机械行驶路径跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的工程机械行驶路径跟踪控制方法,其特征在于,所述构建koopman算子,包括:
3.根据权利要求2所述的工程机械行驶路径跟踪控制方法,其特征在于,用递归最小二乘法计算koopman算子,包括:
4.根据权利要求3所述的工程机械行驶路径跟踪控制方法,其特征在于,所述koopman算子为:
5.根据权利要求4所述的工程机械行驶路径跟踪控制方法,其特征在于,在构建koopman算子之后,所述工程机械行驶路径跟踪控制方法还包括:
6.根据权利要求5所述的工程机械行驶路径跟踪控制方法,其特征在于,基于带遗忘因子的递归最小二乘算法,对所述koopman算子进行更新,包括:
7.根据权利要求6所述的工程机械行驶路径跟踪控制方法,其特征在于,所述遗忘因子λ为:0.9<λ<0.995。
8.根据权利要求1所述的工程机械行驶路径跟踪控制方法,其特征在于,根据所述koopman算子对所述非线性运动学模型进行线性化,以构建整车动力学预测模型,包括:
9.根据权利要求1所述的工程机械行驶路径跟踪控制方法,其特征在于,基于装载机的模拟数据构建装载机的非线性运动学模型,包括:
10.一种工程机械行驶路径跟踪控制装置,其特征在于,包括:
技术总结
本申请公开了一种工程机械行驶路径跟踪控制方法及装置,可以提高装载机的行驶轨迹的预测准确率。其中,工程机械行驶路径跟踪控制方法包括:基于装载机的模拟数据构建装载机的非线性运动学模型;构建Koopman算子;根据所述Koopman算子对所述非线性运动学模型进行线性化,以构建整车动力学预测模型;获取所述装载机的当前状态向量与目标状态向量之间的偏差,以及当前控制向量与目标控制向量之间的控制增量;将所述偏差以及所述控制增量输入至所述整车动力学预测模型进行计算,以生成所述装载机的最优预测轨迹。
技术研发人员:高乐,高鹏飞,门凯
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!