一种飞控系统、建模方法及飞行器与流程
本发明涉及飞行器领域,具体而言,涉及一种飞控系统、建模方法及飞行器。
背景技术:
1、飞控系统,也称为飞行控制系统,是无人机或其他飞行器的关键核心系统之一,它的主要作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性,以及减轻驾驶员的工作负担,但飞行器在自动飞行时无法规划出最优的飞行路径,导致自动避障效果不佳。
2、例如:中国发明专利/实用新型专利(申请号:201510676004.6)所公开的“输电线路无人机巡检飞控系统与自动避障装置”,其说明书公开:包括:处理器;gnss模块,所述gnss模块与所述处理器连接;飞行状态侦测单元,所述飞行状态侦测单元与所述处理器连接;接口驱动,所述接口驱动与所述处理器连接。无人机飞控模块包括飞行状态侦测单元,飞行状态侦测单元可以获得诸如过载信息、航姿信息、空速信息以及气流角信息等飞行状态信息,并通过gnss获得导航信息,然后将飞行状态信息与导航信息融合计算后通过接口驱动对无人机进行自主控制,实现超视距控制,提高了无人机的飞行安全,降低了无人机飞行时对操作手的依赖;上述专利可以佐证现有技术存在的缺陷。
3、因此我们对此做出改进,提出一种飞控系统、建模方法及飞行器。
技术实现思路
1、本发明的目的在于:针对目前存在的飞行器在自动飞行时无法规划出最优的飞行路径,导致自动避障效果不佳。
2、为了实现上述发明目的,本发明提供了以下飞控系统、建模方法及飞行器,以改善上述问题。
3、本申请具体是这样的:
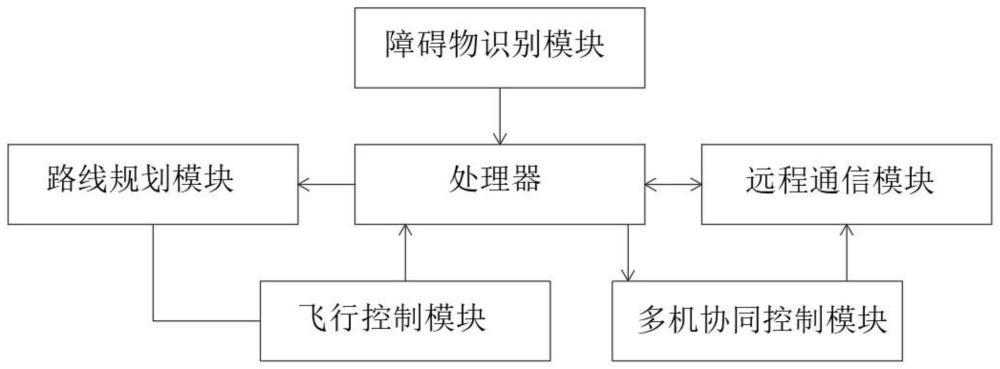
4、一种飞控系统,包括
5、处理器,处理接收到的信息;
6、障碍物识别模块,用于实时识别飞行器飞行路径上的障碍物;
7、路径规划模块,根据障碍物的位置和大小,计算飞行器的最优路径;
8、飞行控制模块,根据最优飞行路径,控制飞行器进行自动飞行;
9、远程通信模块,用于接收远程控制指令,并传输飞行器的飞行状态和扫描数据;
10、多机协同控制模块,用于管理多架飞行器的飞行,确保各飞行器之间的通信和控制不相互干扰。
11、作为本申请优选的技术方案,所述障碍物识别模块采用雷达、激光雷达、红外传感器或图像识别技术中的至少两种,以实现对障碍物的精准识别。
12、作为本申请优选的技术方案,所述路径规划模块采用dijkstra算法、ai算法或遗传算法,计算飞行器避开障碍物的最优飞行路径。
13、作为本申请优选的技术方案,所述飞行控制模块通过pid控制器,根据最优飞行路径,控制飞行器的飞行高度、速度和方向。
14、作为本申请优选的技术方案,所述多机协同控制模块采用时分复用、频分复用或码分复用的方式,确保多架飞行器之间的通信和控制不相互干扰。
15、一种建模方法,包括如下步骤:
16、s1、通过飞行控制模块控制飞行器自动在指定区域上空飞行,通过扫描模块对地面场景进行扫描;
17、s2、采用不同高度的飞行路径,由高度由高中低的顺序对地面建筑进行多次扫描,每次扫描对上一次扫描数据进行验证、纠正和补充;
18、s3、每次扫描采用多种不同的扫描技术,集合多种扫描方法的优点;
19、s4、通过不同的扫描方式识别建筑、树木和车辆等物品;
20、s5、通过扫描信息的前后帧的光流信息判断各物品之间的位置关系,通过蒸馏算法对ai进行训练,减少ai的模型的生成时间。
21、作为本申请优选的技术方案,所述扫描模块包括多种扫描技术,扫描技术包括但不限于雷达、激光雷达、红外传感器和图像识别技术。
22、作为本申请优选的技术方案,所述建模方法,通过反射不同频率或波长的方式,提高对建筑、树木和车辆等物品的识别精度。
23、一种飞行器,包括机盒,所述机盒的周侧设有若干个支撑架,所述支撑架的外部设有保护组件,所述保护组件的外部周侧设有多个动力组件,所述机盒的内部设有控制组件,所述控制组件的顶部设有顶盖,所述控制组件的圆周侧设有若干个传动组件,所述传动组件穿过机盒与支撑架连接,所述机盒的内部设有主板,机盒的底端安装设有扫描组件,扫描组件具体为扫描模块。
24、作为本申请优选的技术方案,所述保护组件包括一号c形套管,所述一号c形套管的外侧设有二号c形套管,所述二号c形套管的内部设有伸缩杆,所述二号c形套管内设有控制绳,二号c形套管的外侧设有防护布,所述防护布上设有若干个线圈,所述控制绳穿过若干个线圈后的端部与顶盖连接,控制绳的另一端从伸缩杆外侧绕过伸缩杆与控制组件连接,控制绳上设有触发组件。
25、与现有技术相比,本发明的有益效果:
26、在本申请的方案中:
27、1.为了解决现有技术飞行器在自动飞行时无法规划出最优的飞行路径,导致自动避障效果不佳的问题,本申请通过设置的路径规划模块采用dijkstra算法、ai算法或遗传算法,计算飞行器避开障碍物的最优飞行路径,能够降低飞行器出现避障后发生后续碰撞或事故的情况;
28、2.为了解决现有技术中建模不能准确识别物体进而不方便通过算法进行优化的问题,本申请通过设置的建模方法,通过每次扫描采用多种不同的扫描技术,集合多种扫描方法的优点,进而通过不同的扫描方式识别建筑、树木和车辆等物品,并通过扫描信息的前后帧的光流信息判断各物品之间的位置关系,通过蒸馏算法对ai进行训练,减少ai的模型的生成时间;实现了识别不同的物体,通过数据库中的物品特征进行针对性优化模型;
29、3.通过设置的保护组件,防护布展开时包覆在二号c形套管的外侧,保护机盒,当大风天气时防护布折叠收纳,减小大风对飞行器的影响,实现了在大风天气,减小机身受大风的影响;
30、4.通过设置的保护组件,控制绳、防护布和盖板形成降落伞结构,防护布和盖板形成伞面,控制绳作为伞绳,实现了飞行器受到干扰或电量不足时减少飞行器的掉落时间,防止飞行器摔坏;
31、5.通过设置的支撑架和传动组件的配合使用,降落伞展开后,连接杆转动使弧形杆的端部抵住缓冲垫的底部,实现飞行器掉落时进行缓冲,保护内部的结构。
技术特征:
1.一种飞控系统,其特征在于,包括
2.根据权利要求1所述的一种飞控系统,其特征在于,所述障碍物识别模块采用雷达、激光雷达、红外传感器或图像识别技术中的至少两种,以实现对障碍物的精准识别。
3.根据权利要求2所述的一种飞控系统,其特征在于,所述路径规划模块采用dijkstra算法、ai算法或遗传算法,计算飞行器避开障碍物的最优飞行路径。
4.根据权利要求3所述的一种飞控系统,其特征在于,所述飞行控制模块通过pid控制器,根据最优飞行路径,控制飞行器的飞行高度、速度和方向。
5.根据权利要求4所述的一种飞控系统,其特征在于,所述多机协同控制模块采用时分复用、频分复用或码分复用的方式,确保多架飞行器之间的通信和控制不相互干扰。
6.一种建模方法,使用如权利要求5所述的飞控系统,其特征在于,包括如下步骤:
7.根据权利要求6所述的一种建模方法,其特征在于,所述扫描模块包括多种扫描技术,扫描技术包括但不限于雷达、激光雷达、红外传感器和图像识别技术。
8.根据权利要求7所述的一种建模方法,其特征在于,所述建模方法,通过反射不同频率或波长的方式,提高对建筑、树木和车辆等物品的识别精度。
9.一种飞行器,使用如权利要求8所述的建模方法,其特征在于,包括机盒(1),所述机盒(1)的周侧设有若干个支撑架(2),所述支撑架(2)的外部设有保护组件(4),所述保护组件(4)的外部周侧设有多个动力组件(6),所述机盒(1)的内部设有控制组件(3),所述控制组件(3)的顶部设有顶盖(7),所述控制组件(3)的圆周侧设有若干个传动组件(5),所述传动组件(5)穿过机盒(1)与支撑架(2)连接,所述机盒(1)的内部设有主板(9),机盒(1)的底端安装设有扫描组件(8),扫描组件(8)具体为扫描模块。
10.根据权利要求9所述的一种飞行器,其特征在于,所述保护组件(4)包括一号c形套管(41),所述一号c形套管(41)的外侧设有二号c形套管(42),所述二号c形套管(42)的内部设有伸缩杆(43),所述二号c形套管(42)内设有控制绳(44),二号c形套管(42)的外侧设有防护布(45),所述防护布(45)上设有若干个线圈,所述控制绳(44)穿过若干个线圈后的端部与顶盖(7)连接,控制绳(44)的另一端从伸缩杆(43)外侧绕过伸缩杆(43)与控制组件(3)连接,控制绳(44)上设有触发组件(46)。
技术总结
本申请提供了一种飞控系统、建模方法及飞行器,包括处理器,处理接收到的信息;障碍物识别模块,用于实时识别飞行器飞行路径上的障碍物;路径规划模块,根据障碍物的位置和大小,计算飞行器避开障碍物的最优飞行路径;飞行控制模块,根据最优飞行路径,控制飞行器进行自动飞行;远程通信模块,用于接收远程控制指令,并传输飞行器的飞行状态和扫描数据。本申请解决现有技术飞行器在自动飞行时无法规划出最优的飞行路径,导致自动避障效果不佳的问题,本申请通过设置的路径规划模块采用Dijkstra算法、Ai算法或遗传算法,计算飞行器避开障碍物的最优飞行路径,能够降低飞行器出现避障后发生后续碰撞或事故的情况。
技术研发人员:郑幸,曾炜,庞顺顺,严戈
受保护的技术使用者:成都愿景仿视科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!