闭环仿真测试方法及终端与流程
本发明涉及车辆自动驾驶控制,特别涉及一种闭环仿真测试方法及终端。
背景技术:
1、随着智能驾驶技术的不断发展,越来越多的辅助驾驶功能甚至自动驾驶功能问世。但是由于智能驾驶的复杂性,智能驾驶相关算法及功能的开发及测试就成为其中极为重要的一环。
2、目前,对智能驾驶相关算法的测试主要包括:实车测试和仿真模拟测试。实车测试,其测试过程相对繁琐耗时,导致只有一部分比较突出的问题场景会被验证,路测过程中发现的各种多样化的问题场景无法全部覆盖;仿真模拟测试,只能验证新版算法在历史场景中出现问题的时间点的表现。
3、因此,亟需一种闭环仿真测试方法及终端来解决上述问题。
技术实现思路
1、本发明解决的技术问题在于,提供了一种闭环仿真测试方法及终端,能够验证新版算法在历史场景中连续的表现。
2、本发明解决其技术问题是采用以下的技术方案来实现的:
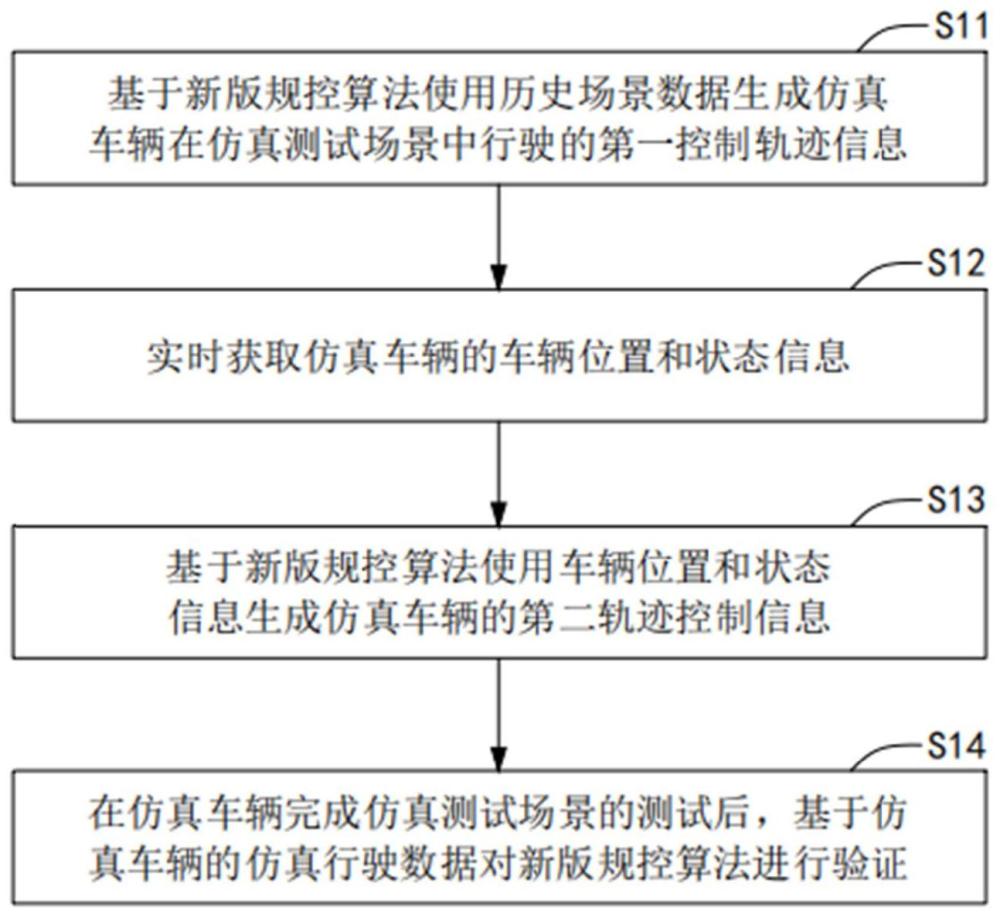
3、一种闭环仿真测试方法,包括:基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息;实时获取所述仿真车辆的车辆位置和状态信息;基于所述新版规控算法使用所述车辆位置和状态信息生成所述仿真车辆的第二轨迹控制信息;在所述仿真车辆完成所述仿真测试场景的测试后,基于所述仿真车辆的仿真行驶数据对所述新版规控算法进行验证。
4、在本发明的较佳实施例中,上述基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息的步骤之前,包括:获取历史场景数据,并根据所述历史场景数据生成仿真测试场景。
5、在本发明的较佳实施例中,上述历史场景数据包括:静态数据和动态数据,所述静态数据包括障碍物、车道线和障碍物轨迹预测消息,所述动态数据包括车辆位置和车辆状态。
6、在本发明的较佳实施例中,上述获取历史场景数据,并根据所述历史场景数据生成仿真测试场景的步骤之后,还包括:根据仿真车辆坐标系、原始车辆坐标系对所述静态数据的全局坐标进行坐标转换。
7、在本发明的较佳实施例中,上述根据仿真车辆坐标系、原始车辆坐标系对所述静态数据的全局坐标进行坐标转换的步骤之后,还包括:获取所述静态数据更新后的全局坐标;根据所述全局坐标和所述仿真车辆的全局坐标,获取所述静态数据的相对坐标。
8、在本发明的较佳实施例中,上述获取历史场景数据,并根据所述历史场景数据生成仿真测试场景的步骤之后,还包括:获取实时仿真时长;根据所述实时仿真时长从所述历史场景数据获取相应的静态数据,并基于所述静态数据实时更新所述仿真测试场景。
9、在本发明的较佳实施例中,上述基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息的步骤之前,还包括:获取实时仿真时长;根据所述实时仿真时长获取对应帧的静态数据以及未来多帧的静态数据,对障碍物的障碍物轨迹进行预测。
10、在本发明的较佳实施例中,上述实时获取所述仿真车辆的车辆位置和状态信息的步骤,包括:根据所述实时仿真时长和所述第一控制轨迹信息获取所述仿真车辆的车辆位置;根据所述第一控制轨迹信息和所述仿真测试场景获取所述仿真车辆的状态信息。
11、一种终端,包括:存储器、处理器,其中,所述存储器上存储有闭环仿真测试程序,所述闭环仿真测试程序被所述处理器执行时实现如上述中任一项所述的闭环仿真测试方法的步骤。
12、一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述中任一项所述的闭环仿真测试方法的步骤。
13、本发明采用上述技术方案达到的技术效果是:通过使用历史场景数据生成仿真测试场景对新版规控算法进行验证,减少了实车路测测试需求,降低测试成本,提高测试效率。
14、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。
技术特征:
1.一种闭环仿真测试方法,其特征在于,包括:
2.如权利要求1所述的闭环仿真测试方法,其特征在于,所述基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息的步骤之前,包括:
3.如权利要求2所述的闭环仿真测试方法,其特征在于,所述历史场景数据包括:静态数据和动态数据,所述静态数据包括障碍物、车道线和障碍物轨迹预测消息,所述动态数据包括车辆位置和车辆状态。
4.如权利要求3所述的闭环仿真测试方法,其特征在于,所述获取历史场景数据,并根据所述历史场景数据生成仿真测试场景的步骤之后,还包括:
5.如权利要求4所述的闭环仿真测试方法,其特征在于,所述根据仿真车辆坐标系、原始车辆坐标系对所述静态数据的全局坐标进行坐标转换的步骤之后,还包括:
6.如权利要求3所述的闭环仿真测试方法,其特征在于,所述获取历史场景数据,并根据所述历史场景数据生成仿真测试场景的步骤之后,还包括:
7.如权利要求1至5中任一项所述的闭环仿真测试方法,其特征在于,所述基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息的步骤之前,还包括:
8.如权利要求6所述的闭环仿真测试方法,其特征在于,所述实时获取所述仿真车辆的车辆位置和状态信息的步骤,包括:
9.一种终端,其特征在于,所述终端包括:存储器、处理器,其中,所述存储器上存储有闭环仿真测试程序,所述闭环仿真测试程序被所述处理器执行时实现如权利要求1至8中任一项所述的闭环仿真测试方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的闭环仿真测试方法的步骤。
技术总结
本发明提供了一种闭环仿真测试方法及终端,所述方法包括:基于新版规控算法使用历史场景数据生成仿真车辆在仿真测试场景中行驶的第一控制轨迹信息;实时获取所述仿真车辆的车辆位置和状态信息;基于所述新版规控算法使用所述车辆位置和状态信息生成所述仿真车辆的第二轨迹控制信息;在所述仿真车辆完成所述仿真测试场景的测试后,基于所述仿真车辆的仿真行驶数据对所述新版规控算法进行验证。本发明通过使用历史场景数据生成仿真测试场景对新版规控算法进行验证,减少了实车路测测试需求,降低测试成本,提高测试效率。
技术研发人员:管登荣,卢晓鹏
受保护的技术使用者:宁波路特斯机器人有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!