武器伺服系统运行状态监测及故障识别处理方法及系统与流程
本发明涉及一种武器伺服系统运行状态监测及故障识别处理方法及系统,属于武器伺服控制研究。
背景技术:
1、面对未来跨空域,多任务剖面工作需求,未来武器上伺服系统精度、性能及可靠性要求逐步提升。在长航时大负载机动工作过程中,受长时过载运行影响,系统温升严重,尤其电机内部电磁参数出现非线性时变,在强耦合、多参量系统中一方面易造成系统效率降低,进一步加剧系统发热,出现局部热点,甚至造成系统损毁。另一方面,长时间低效过载运行也会损坏系统使用寿命,降低伺服系统可靠性。目前传统的控制策略尚无较好的办法进行优化改善,通常情况下通过自身固定参数适应恶劣工况影响,因此控制性能优劣取决于内部环路参数鲁棒性,大大增加了系统调试难度,不利于系统稳定性及控制性能设计。
2、此外,长时间过热、过效运行会严重损耗部件寿命,甚至造成系统失效,因此亟需面向武器伺服系统构建状态监测平台,识别故障模式和风险,设计开发健康管理系统,促使人工智能与电驱系统逐步融合,形成一套集智能自主状态监测、故障分级分类处理的故障诊断及处理体系。
技术实现思路
1、本发明解决的技术问题是:针对目前现有技术中,传统武器伺服系统的控制手段无法适应恶劣工况且调试难度大的问题,提出了一种武器伺服系统运行状态监测及故障识别处理方法及系统。
2、本发明解决上述技术问题是通过如下技术方案予以实现的:
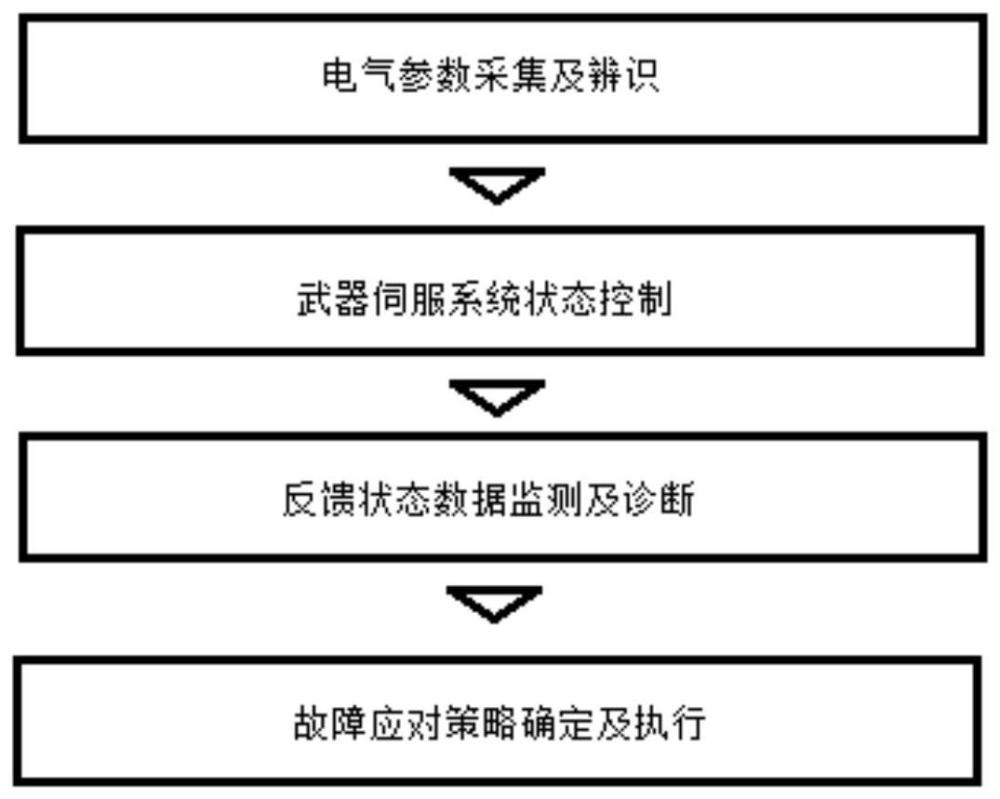
3、一种武器伺服系统运行状态监测及故障识别处理方法,包括:
4、实时采集武器伺服系统电机内部参数,对电机内部参数进行电机电气参数的实时辨识;
5、向武器伺服系统发送控制指令以切换武器伺服系统的工作状态;
6、根据实时辨识所得电机电气参数及武器伺服系统的状态数据进行武器伺服系统的状态检测和故障诊断;
7、根据故障诊断结果,选取指定的故障应对策略进行故障处理。
8、所述武器伺服系统电机内部参数包括:集成三相电流、母线电流、母线电压;
9、电机电气参数的实时辨识具体为:
10、采用基于遗忘算法实现的扩展卡尔曼滤波算法进行武器伺服系统电机电气参数的实时辨识,获取电机d轴电流id、q轴电流iq、永磁体磁链ψf及电机q轴电感流lq及电机内阻参数rs。
11、所述控制指令中涉及的控制参数及预设算法均通过实时辨识所得电机电气参数进行调整确定;控制参数包括武器伺服系统位置环、电流环pid控制参数,预设算法包括恒功率弱磁升速控制算法及电流环解耦控制算法。
12、所述电机电气参数还包括电机绕组内芯温度、电机转矩、电机转速,其中:
13、根据电机内阻参数rs确定电机绕组内芯温度,计算电机绕组内芯温度;
14、根据永磁体磁链ψf及电机q轴电感lq计算电机转矩;
15、根据电机三相霍尔位置信号确定电机转速。
16、所述武器伺服系统的工作状态包括:弱磁工作态,大动压工作态;
17、弱磁工作态下,武器伺服系统电机转速通过转矩补偿算法调整以实现过载转速输出;
18、大动压工作态下,武器伺服系统电机转速通过电流环解耦补偿算法实现电机双轴解耦控制。
19、武器伺服系统的状态检测和故障诊断具体方法为:
20、通过遥测方式接收武器伺服系统的反馈状态数据及实时电机电气参数,根据离线故障知识库的先验信息,确定故障情况,对各类故障模式进行判断,完成故障诊断;
21、其中,反馈状态数据包括二次电源信号、看门狗复位信号、遥测信号。
22、所述故障模式包括通讯故障、控制故障,控制故障等级包括一般故障、严重故障;故障应对策略根据故障情况或故障情况及控制故障等级共同确定。
23、各类故障情况均对应故障分级处理方法,故障分级处理包括通讯重启、降额运行以及停机处理;若故障模式为通讯故障,故障应对策略根据故障情况确定;若故障模式为控制故障,泽根据故障分级处理方法、控制故障等级共同确定。
24、一种武器伺服系统运行状态监测及故障识别处理系统,用于实现器伺服系统长航时运行状态实时监测及故障识别处理方法,包括参数采集模块、故障诊断模块、策略及算法制定模块,其中:
25、参数采集模块,实时采集武器伺服系统电机内部参数,发送至策略及算法制定模块;采集执行控制指令后的武器伺服系统的反馈状态数据及实时电机电气参数,并发送至故障诊断模块;
26、故障诊断模块,通过遥测方式接收反馈状态数据及实时电机电气参数,根据先验信息,确定故障情况,对各类故障模式进行判断,完成故障诊断;
27、策略及算法制定模块,预设基于遗忘算法实现的扩展卡尔曼滤波算法进行参数采集模块发送的武器伺服系统电机电气参数的实时辨识;根据实时辨识后的电机电气参数确定控制参数及预设算法,形成控制指令并发送至武器伺服系统。
28、所述先验信息根据离线故障知识库获取。
29、本发明与现有技术相比的优点在于:
30、(1)本发明提供的一种武器伺服系统运行状态监测及故障识别处理方法及系统,根据导弹伺服全系统工作机理,能够基于参数自主交叉校正的五阶扩展卡尔曼滤波,增加遗忘算法在外部强干扰、多耦合影响下快速准确识别系统工作状态,同时模拟真实工况,建立多物理场工况模型,实时采集电机电气参数,提取含有关键参数特征向量,实时辨识系统内部时变量,依据任务需求将飞行过程划分不同状态字,包括弱磁工作态及大动压工作态,通过前期详实的地面试验数据,导弹伺服系统可根据上级切换状态指令,主动切换控制参数及算法,实现精密导弹伺服高精度高可靠控制;
31、(2)本发明在试验室半实物仿真平台上构建电驱分系统故障注入试验平台,通过模拟不同类型故障信号注入,记录故障样本,提取特定故障参数,实现故障特征预兆提取及判别,形成离线故障知识库。同时建立分级分类管理策略,形成健康管理决策并执行,实现了精密导弹伺服系统长航时运行故障诊断与健康管理系统的设计,满足了未来电动飞行器安全性和智能化发展趋势。
技术特征:
1.一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于包括:
2.根据权利要求1所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
3.根据权利要求1所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
4.根据权利要求2所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
5.根据权利要求1所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
6.根据权利要求1所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
7.根据权利要求6所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
8.根据权利要求7所述的一种武器伺服系统运行状态监测及故障识别处理方法,其特征在于:
9.一种武器伺服系统运行状态监测及故障识别处理系统,用于实现权利要求8所述的器伺服系统长航时运行状态实时监测及故障识别处理方法,其特征在于:
10.根据权利要求9所述的一种武器伺服系统运行状态监测及故障识别处理系统,其特征在于:
技术总结
一种武器伺服系统运行状态监测及故障识别处理方法及系统,能够基于参数自主交叉校正的五阶扩展卡尔曼滤波,增加遗忘算法在外部强干扰、多耦合影响下快速准确识别系统工作状态,同时模拟真实工况,建立多物理场工况模型,实时采集电机电气参数,提取含有关键参数特征向量,实时辨识系统内部时变量,依据任务需求将飞行过程划分不同状态字,包括弱磁工作态及大动压工作态,通过前期详实的地面试验数据,导弹伺服系统可根据上级切换状态指令,主动切换控制参数及算法,实现精密导弹伺服高精度高可靠控制。
技术研发人员:何洋,蒋龙鑫,周道,黄佳怡,侯小兰
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!