一种农用无人机控制模块的制作方法
本技术涉及无人机控制领域,更具体地,涉及一种农用无人机控制模块。
背景技术:
1、目前,农用无人机在农业喷洒方面具有广阔的应用前景,可以实现农作物的保护和营养调节。然而,现有技术存在一些缺点,需要解决的技术问题也逐渐凸显。
2、目前,大部分农用无人机在喷洒作业中采用固定间距的喷头布局,这种布局无法根据农作物的生长状态和生长环境进行调整,导致喷洒效果不佳、药剂浪费,并且使用起来不够方便。此外,无人机的飞行高度也会影响喷头间距选择。如果飞行高度较高,则需要较大的喷头间距,以保证药液能够在飞行过程中均匀喷洒在目标区域。而如果飞行高度较低,则需要较小的喷头间距,以保证喷洒的药剂能够均匀分布。
3、如何使得无人机在作业过程中自动调节喷头之间的间距是解决这些问题的关键。
技术实现思路
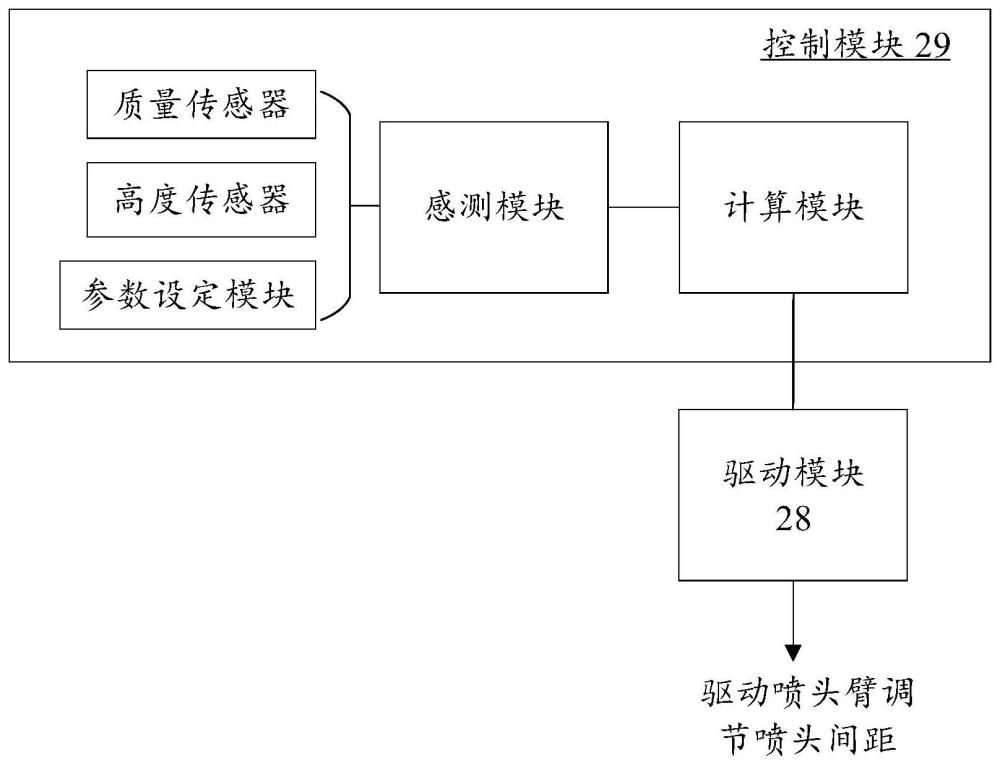
1、本技术提供一种农用无人机控制模块。其中,感测模块通过获取无人机搭载的传感器所感测的数据、以及通过参数设定模块设定的作业参数;计算模块使用感测模块获取的数据针对无人机喷洒作业时刻最佳喷头间距进行计算;驱动模块根据计算模块的计算结果,驱动喷头臂进行调节,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,使农用无人机的喷洒作业可以变得更加智能化、高效和精准,提高农作物的生长品质和产量。
2、第一方面,提供一种农用无人机控制模块,该控制模块安装于农用无人机,该农用无人机还包括旋翼、离心喷头、储液箱以及驱动模块;离心喷头通过驱动模块固定于储液箱一侧,储液箱用于存储待喷洒药剂。其中,控制模块包括感测模块和计算模块;具体的,感测模块用于获取农用无人机的作业数据,感测模块包括质量传感器、高度传感器以及参数设定模块;其中,质量传感器用于获取农用无人机载荷量的值,高度传感器用于获取农用无人机飞行高度的值,参数设定模块用于输入农用无人机的作业参数。计算模块基于感测模块输出的作业数据计算农用无人机喷洒的雾滴的降落时间,基于降落时间计算农用无人机离心喷头的第一间距。驱动模块基于计算模块输出的第一间距驱动离心喷头沿水平方向相对运动调整离心喷头的间距达到第一间距。
3、基于本技术方案,农用无人机通过感测模块获取搭载的传感器所感测的数据以及参数设定模块设定的作业参数,并通过计算模块基于感测模块获取的数据针对无人机喷洒作业时最佳喷头间距进行计算;驱动模块基于计算模块的计算结果,驱动喷头臂对离心喷头的间距进行调节,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
4、应理解,第一间距包括根据无人机当前飞行高度以及旋翼转速等作业参数确定的离心喷头之间的距离,当任一水平方向上两个离心喷头间的间距小于等于第一间距时,在室温、标准大气压、无风的环境下,两喷头喷洒出的药剂可以均匀覆盖到喷头无人机下方的作业范围,以期实现药剂喷洒的全覆盖,提升药剂喷洒的覆盖范围。
5、结合第一方面,在第一方面的某些实现方式中,离心喷头包括雾化盘,雾化盘通过高速旋转使外缘的齿状物撞击待喷洒药剂,在高速碰撞下,待喷洒药剂被撞碎雾化,形成雾滴并通过离心喷头向外喷洒。
6、基于本技术方案,使用离心喷头进行药剂喷洒,并对离心喷头的第一间距进行自动调节,使离心喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
7、结合第一方面,在第一方面的某些实现方式中,驱动模块包括喷头臂以及滑轨,离心喷头通过喷头臂滑动固定于滑轨上。其中,驱动模块接收到计算模块输出的第一间距,驱动模块驱动喷头臂在滑轨上沿水平方向相对运动调整离心喷头的间距达到第一间距。
8、基于本技术方案,离心喷头通过喷头臂滑动固定于滑轨,驱动模块接收到计算模块输出的第一间距后,驱动喷头臂在滑轨上滑动调节,使离心喷头达到第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
9、结合第一方面,在第一方面的某些实现方式中,通过参数设定模块输入的作业参数包括:雾滴的粒径、雾化盘的转速、齿状物的半径、待喷洒药剂的密度、旋翼的数量以及旋翼的直径。
10、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合作业情况自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
11、结合第一方面,在第一方面的某些实现方式中,计算模块基于感测模块输出的作业数据计算降落时间。具体的,计算模块基于感测模块输出的待喷洒药剂的密度、雾滴的粒径,计算雾滴的空气阻力系数;计算模块基于感测模块输出的农用无人机载荷量、旋翼的数量、旋翼的直径,计算旋翼产生的下压风场的风速;计算模块基于感测模块输出的农用无人机飞行高度,结合雾滴的空气阻力系数和下压风场的风速,计算降落时间。
12、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合作业情况自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
13、结合第一方面,在第一方面的某些实现方式中,计算模块基于降落时间计算第一间距。具体的,计算模块基于感测模块输出的雾化盘的转速、齿状物的半径,计算雾滴沿水平方向喷洒的初速度;计算模块结合降落时间、初速度,计算雾滴沿水平方向喷洒的距离;计算模块基于雾滴沿水平方向喷洒的距离,输出第一间距。
14、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
15、结合第一方面,在第一方面的某些实现方式中,计算降落时间包括
16、
17、其中,h为农用无人机飞行高度的值,vs为下压风场的风速,μ为空气阻力系数,通过获取农用无人机飞行高度的值h,计算降落时间t。
18、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
19、结合第一方面,在第一方面的某些实现方式中,计算雾滴沿水平方向的喷洒距离包括
20、
21、其中,rf为雾滴沿水平方向的喷洒距离,vx为雾滴的初速度,μ为空气阻力系数,t为降落时间,基于降落时间t计算雾滴沿水平方向的喷洒距离rf。
22、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
23、结合第一方面,在第一方面的某些实现方式中,输出第一间距包括
24、n≤2rf,
25、其中,n为第一间距,rf为雾滴沿水平方向的喷洒距离。
26、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
27、结合第一方面,在第一方面的某些实现方式中,确定雾滴的粒径的方法包括
28、d=an+bf+c,
29、其中,d为雾滴的粒径,n为雾化盘的转速,f为雾化盘的流量,a、b、c为待定系数;确定待定系数包括通过实测雾滴粒径d的数值进行拟合。
30、基于本技术方案,通过实验测试得到的雾滴粒径值与雾化盘转速以及雾化盘流量两个因变量拟合从而确定拟合公式的待定系数的值,得到雾滴粒径的计算公式,在农用无人机作业过程中,可根据雾化盘的转速以及雾化盘的流量确定雾滴的粒径,从而确定雾滴滴落时间以及相应的喷洒距离。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
31、结合第一方面,在第一方面的某些实现方式中,计算雾滴的空气阻力系数包括
32、
33、其中,μ为空气阻力系数,d为雾滴的粒径,ρ为待喷洒药剂的密度。
34、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
35、结合第一方面,在第一方面的某些实现方式中,计算下压风场的风速包括
36、
37、其中,vs为下压风场的风速,m为旋翼的数量,d为旋翼的直径,l为农用无人机载荷量的值,g为重力加速度。
38、基于本技术方案,通过在农用无人机输入相关作业参数后,该农业无人机可基于设定的作业参数,并结合传感器感测的喷洒作业时的参数自动调节离心喷头的间距,使喷头达到设置的第一间距。本技术可以通过设备自动调节实现喷洒间距的调节,以提升药剂喷洒的覆盖范围,提高农用无人机的作业效率,减少药剂浪费和人工成本。
39、第二方面,本技术提供了一种农用无人机,包括上述第一方面及第一方面中任意实现方式的农用无人机控制模块。
- 还没有人留言评论。精彩留言会获得点赞!