一种机器人的速度规划方法、装置、机器人及存储介质与流程
本发明涉及自动驾驶的,尤其涉及一种机器人的速度规划方法、装置、机器人及存储介质。
背景技术:
1、在工厂、码头、医院等场景中,广泛使用支持机器人自动进行运动规划,以进行清洁、货物运输等操作。
2、在运动规划中,速度规划作为其中一项常用功能,影响到下游纵向控制层的执行,目前应用在机器人自动驾驶上的速度规划主要有基于动态规划的速度规划、基于二次规划的速度规划、基于非线性规划的速度规划、基于t型曲线的速度规划、基于s型曲线的速度规划等。
3、基于动态规划、二次规划、非线性规划的速度规划均基于frenet坐标系,构建frenet坐标系的计算量较大、通用性较弱,对于高动态、近距离的障碍物可能存在碰撞风险。
4、基于t型曲线的速度规划的加速度不连续,在加减速阶段与匀速阶段的衔接处,存在突变的情况,对机器人的执行器造成冲击,影响机器人的舒适性。
5、基于s型曲线的速度规划分段较多、结构复杂,导致算法计算量较大,实现起来相对复杂。
技术实现思路
1、本发明提供了一种机器人的速度规划方法、装置、机器人及存储介质,以解决如何对机器人实现平滑的、兼容性高及低计算量的速度规划的问题。
2、根据本发明的一方面,提供了一种机器人的速度规划方法,包括:
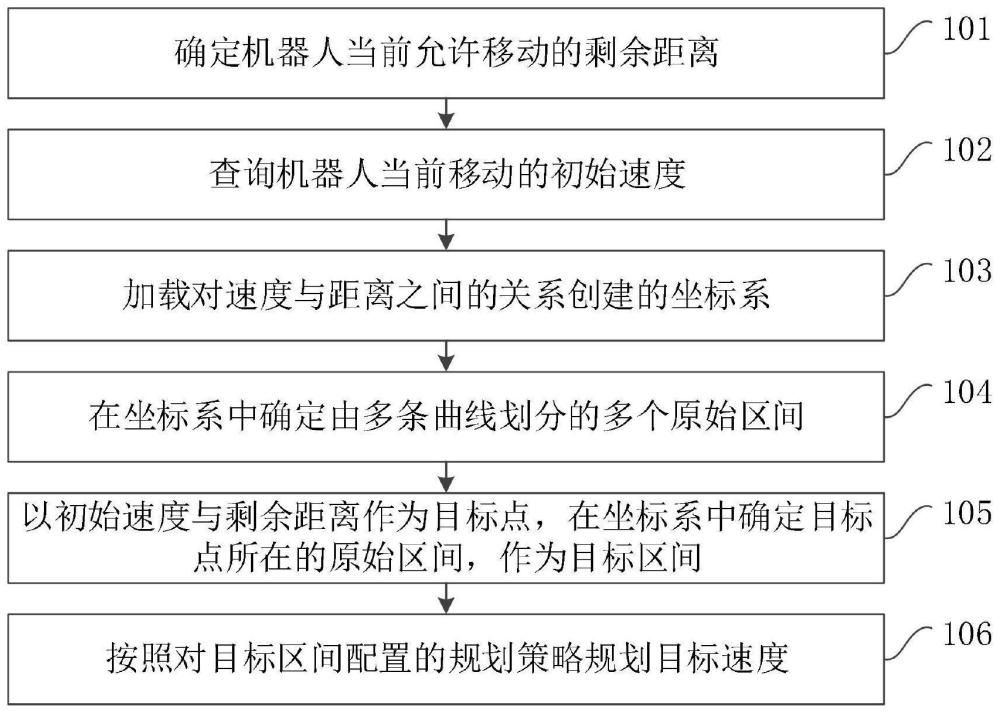
3、确定机器人当前允许移动的剩余距离;
4、查询所述机器人当前移动的初始速度;
5、加载对速度与距离之间的关系创建的坐标系,所述坐标系中具有模拟用户驾驶的模式对速度与距离之间的关系拟合的多条曲线;
6、在所述坐标系中确定由多条所述曲线划分的多个原始区间,各个所述原始区间均配置有规划策略;
7、以所述初始速度与所述剩余距离作为目标点,在所述坐标系中确定所述目标点所在的原始区间,作为目标区间;
8、按照对所述目标区间配置的规划策略规划目标速度。
9、根据本发明的另一方面,提供了一种机器人的速度规划装置,包括:
10、剩余距离确定模块,用于确定机器人当前允许移动的剩余距离;
11、初始速度查询模块,用于查询所述机器人当前移动的初始速度;
12、坐标系加载模块,用于加载对速度与距离之间的关系创建的坐标系,所述坐标系中具有模拟用户驾驶的模式对速度与距离之间的关系拟合的多条曲线;
13、原始区间确定模块,用于在所述坐标系中确定由多条所述曲线划分的多个原始区间,各个所述原始区间均配置有规划策略;
14、目标区间确定模块,用于以所述初始速度与所述剩余距离作为目标点,在所述坐标系中确定所述目标点所在的原始区间,作为目标区间;
15、目标速度规划模块,用于按照对所述目标区间配置的规划策略规划目标速度。
16、根据本发明的另一方面,提供了一种机器人,所述机器人包括:
17、至少一个处理器;以及
18、与所述至少一个处理器通信连接的存储器;其中,
19、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的机器人的速度规划方法。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于使处理器执行时实现本发明任一实施例所述的机器人的速度规划方法。
21、在本实施例中,确定机器人当前允许移动的剩余距离;查询机器人当前移动的初始速度;加载对速度与距离之间的关系创建的坐标系,坐标系中具有模拟用户驾驶的模式对速度与距离之间的关系拟合的多条曲线;在坐标系中确定由多条曲线划分的多个原始区间,各个原始区间均配置有规划策略;以初始速度与剩余距离作为目标点,在坐标系中确定目标点所在的原始区间,作为目标区间;按照对目标区间配置的规划策略规划目标速度。本实施例在速度与距离的关系上,模拟用户驾驶的模式对机器人规划速度,实现了拟人的速度规划,模拟用户驾驶的行为习惯,可以有效提高速度的平滑性,速度规划主要依赖速度与距离的坐标系,操作简单,计算量低,实时性高。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人的速度规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定机器人当前允许移动的剩余距离,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述按照所述目标区间配置的规划策略规划目标速度,包括:
4.根据权利要求3所述的方法,其特征在于,所述曲线依次包括相连的线段与射线,所述射线与所述坐标系的横轴平行,多条所述曲线中线段的斜率自上而下递减;
5.根据权利要求3所述的方法,其特征在于,所述按照所述第一位置在预设的加速范围内设置加速度,包括:
6.根据权利要求5所述的方法,其特征在于,所述将所述目标点在所述加速区间所处的第二位置映射至所述加速范围,得到加速度,包括:
7.根据权利要求3所述的方法,其特征在于,所述设置随所述机器人移动而递减的目标速度,包括:
8.一种机器人的速度规划装置,其特征在于,包括:
9.一种机器人,其特征在于,所述机器人包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于使处理器执行时实现权利要求1-7中任一项所述的机器人的速度规划方法。
技术总结
本发明公开了一种机器人的速度规划方法、装置、机器人及存储介质,该方法包括:确定机器人当前允许移动的剩余距离;查询机器人当前移动的初始速度;加载对速度与距离之间的关系创建的坐标系,坐标系中具有模拟用户驾驶的模式对速度与距离之间的关系拟合的多条曲线;在坐标系中确定由多条曲线划分的多个原始区间,各个原始区间均配置有规划策略;以初始速度与剩余距离作为目标点,在坐标系中确定目标点所在的原始区间,作为目标区间;按照对目标区间配置的规划策略规划目标速度。本实施例实现了拟人的速度规划,模拟用户驾驶的行为习惯,可以有效提高速度的平滑性,速度规划主要依赖速度与距离的坐标系,操作简单,计算量低,实时性高。
技术研发人员:龚志豪,赖志林,周勇,李子辉,吴华勃,刘群阳
受保护的技术使用者:广州赛特智能科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!