一种人机控制权博弈车道保持鲁棒控制方法及系统
本技术涉及自动驾驶,特别涉及一种人机控制权博弈车道保持鲁棒控制方法及系统。
背景技术:
1、复杂场景的驾驶决策、新基建建设、社会伦理、权责界定相关立法等问题,很大程度上阻碍了无人驾驶技术的商业化落地。在当前技术与应用背景下,国内外学者提出了共驾型智能汽车的概念,将人对模糊与不确定问题的高级认知纳入反馈回路,以提升人机共驾系统的整体智能化水平,这正是人机混合增强智能理论在智能驾驶领域的实例化应用。目前,驾驶人与条件/高度自动驾驶系统之间的不安全转换与协同控制是研究的热难点,而如何结合驾驶人技能与智能化车辆新技术设计出更具合作性的驾驶人在环的共驾系统以实现高效的人机协作仍然面临着巨大挑战。
2、共驾型车道保持系统是人机共驾的一个典型应用,使得驾驶人与智辅系统能够共享车辆控制权协同完成车道保持任务。与传统的机械式转向系统相比,x-by-wire技术实现了驾驶人指令到控制动作的完全解耦,能够让智辅系统修正驾驶人指令,为人机协同控制提供技术支撑[5]。按照人机协同控制结构来分,主要包括串联式与并联式。
3、串联式的特点是智辅系统根据车辆安全边界条件对驾驶人的输入指令进行修正,并且当驾驶人输入指令不违背安全边界条件时一般不修正,从而最大程度上满足驾驶人的控制意图。
4、并联式的特点是驾驶人、智辅系统分别决策出各自的控制动作,进而设计控制权分配策略以实现人机协同控制。因此在该控制结构下如何合理地动态分配驾驶人、智辅系统的控制权是十分关键的,直接影响到协同驾驶的性能。
5、如何设计合理的权值分配策略以减少人机冲突,仍是本领域的研究重点。
技术实现思路
1、本技术提供了一种人机控制权博弈车道保持鲁棒控制方法及系统,其优点是通过驾驶人在环的人-车-路模型有效增强共驾过程中智辅系统与驾驶人之间的合作程度。
2、本技术的技术方案如下:
3、一方面,本技术提供一种人机控制权博弈车道保持鲁棒控制方法,包括步骤:
4、基于线性二自由度车辆扩展模型、电动助力转向系统模型,建立车路模型;
5、构建驾驶人转向模型,通过模型参数辨识寻找驾驶人转向模型的最优参数;
6、根据车路模型和驾驶人转向模型建立闭环的人-车-路模型,基于t-s模糊理论,建立人-车-路模型的模糊模型;
7、建立人机控制权博弈模型,输出智辅系统、驾驶人的控制权。
8、进一步的,车路模型为:
9、
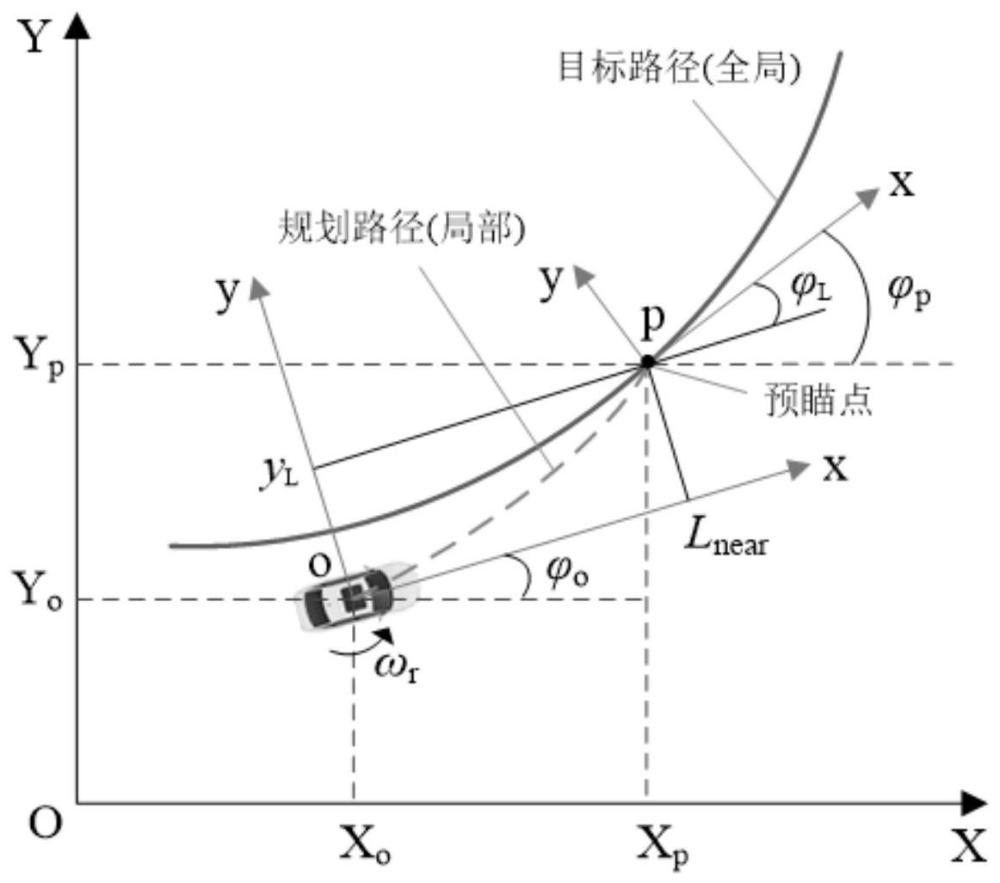
10、式中,为状态向量,uv=td+ta为模型输入,td、ta分别为驾驶人、智辅系统的转向力矩,φ=ρ为预瞄点处的道路曲率,为模型输出,yl为车辆坐标系下车辆质心与预瞄点之间的横向偏差,lnear为单点预瞄距离,vy为横向速度,vx为纵向速度,分别为车辆质心位置处、预瞄点位置处的横摆角,为横摆角偏差,ωr为横摆角速度,δf为前轮转角,cf、cr分别为前轮与后轮的侧偏刚度,a、b分别为前后轴与车辆质心之间的距离,is为转向传动比,ηt为轮胎接触地面宽度,js为转向系等效转动惯量,bs为转向系等效阻尼系数,iz为车辆绕z轴的转动惯量,各系数矩阵满足:
11、
12、
13、gv=[0,0,vx,0,0,0]t
14、
15、进一步的,驾驶人转向模型为:
16、
17、式中,xd=[x1,x2,x3,x4,x5]t为状态向量,ud=[θfar,θnear,δsw]t为模型输入,为模型输出;其中,为远视角,lfar为远视点预瞄距离,l为近视角,θdes=0为期望近视角,δsw为实际的方向盘转角,为驾驶人转向模型估计的转向力矩,各系数矩阵满足:
18、
19、
20、cd=[0,0,0,0,1]
21、其中,kp为视觉预测模块的比例增益,τlead、τlag分别为视觉补偿模块的超前、滞后时间常数,kc为视觉补偿模块的比例增益,τp为延时环节的反应时间,kd为感知环节的比例增益,kg为动作环节的比例增益,τ1、τk1、τk2皆为驾驶人特性常数,τn为神经肌肉动力学模块的时间常数;
22、模型参数辨识步骤包括:
23、采用预测误差方法对驾驶人转向模型参数进行粗略辨识,将待辨识的模型参数视作一个抗体,选取驾驶人真实输入与模型预测输出的偏差平方和的倒数作为适应度函数,经过iga遗传算法迭代寻优后得到一个最优抗体。
24、进一步的,联立式(1)与式(2),建立闭环的人-车-路模型:
25、
26、式中,为状态向量,u=ta为模型输入,为模型输出,各系数矩阵满足
27、
28、
29、
30、
31、
32、基于t-s模糊理论,建立式(3)所示的人-车-路模型的模糊模型:
33、
34、式中,ai,bi,gi,ci,di,ei,代表第i个局部线性子系统的系数矩阵,z为量测,为模糊前件,隶属度函数满足:
35、
36、基于并行分布补偿思想,定义输出反馈模糊控制器模型如下:
37、
38、式中,ξ为状态向量,u为控制器输出,dc为相应的状态系数矩阵;
39、定义增广向量χ=[xt,ξt]t,联立式(4)与式(5),建立闭环控制系统:
40、
41、式中,各系数矩阵满足
42、
43、
44、
45、
46、这样式(5)所示的模糊控制器输出改写如下:
47、
48、式中,
49、针对式(6)所描述的闭环控制系统,建立从φ到y的闭环传递函数的无穷范数,且满足:
50、
51、式中,标量γ>0表示扰动抑制度,γ取值将决定控制系统抑制干扰的能力;
52、根据schur补引理,将式(8)所描述的γ次优h∞输出反馈控制问题转化成带有lmi约束和线性目标函数的凸优化问题:
53、minγ
54、
55、
56、式中,x,y,是lmi的一组可行解,i为单位矩阵,ψij满足
57、
58、其中,(*)代表对称转置,且
59、
60、
61、
62、
63、
64、
65、
66、
67、在得到上述lmi的一组可行解后,便可得到式(5)所示的模糊控制器的各个系数矩阵:
68、
69、
70、
71、
72、式中,m与n皆为非奇异矩阵,且满足mnt=i-xy,当x与y确定后,满秩矩阵m与n可通过奇异值分解的方法得到。
73、进一步的,人机控制权博弈模型:
74、
75、式中,wa、wd分别表示智辅系统、驾驶人的控制权,β1、β2、β3皆为设计参数,表示归一化的转向力矩,表示归一化的车辆横向综合偏差,其中,分别为车辆质心位置处的横向偏差、横摆角偏差的归一化值,λ1、λ2皆为设计参数,且满足λ1+λ2=1。
76、进一步的,还包括人机友好性评价方法,包括构建如下人机友好性评价指标:
77、(1)干预因子
78、定义智辅系统干预因子,对共驾过程中智辅系统对驾驶的干预程度进行量化:
79、
80、式中,δtmax为智辅系统与驾驶人之间最大允许的扭矩差异,ψ为智辅系统干预因子;当ψ→0时,表示人机目标趋于一致;当ψ→1时,表示智辅系统的干预愈发严重;
81、(2)一致率
82、
83、式中,ηco表示一致率,tco表示智辅系统转向力矩ta与驾驶人转向力矩td方向相同的时间,ttotal为总的驾驶时间;
84、(3)抵制率
85、
86、式中,ηrst表示抵制率,trst表示ta方向与td方向相反且ta小于td的时间;
87、(4)冲突率
88、
89、式中,ηcft表示冲突率,tcft表示ta大于td的时间。
90、另一方面,本技术提供一种人机控制权博弈车道保持鲁棒控制系统,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序被处理器调用时,执行如上所述的方法。
91、综上所述,本技术的有益效果有:
92、1.为了更好地模仿驾驶人的转向行为,设计了一种iga优化的驾驶人转向模型,驾驶人在环的人-车-路模型,能够有效增强共驾过程中智辅系统与驾驶人之间的合作程度。
93、2.考虑到模型结构与参数的不确定性、车辆动力学的强非线性等扰动因素,基于t-s模糊控制理论设计了输出反馈γ次优h∞鲁棒控制器,具有较好的扰动抑制能力。
94、3.根据驾驶人转向行为以及车辆横向综合偏差情况,设计了一种人机控制权博弈模型,实现了人机交互效果的显性表达以及人机控制权的有效管理。
- 还没有人留言评论。精彩留言会获得点赞!