目标对象控制方法、装置、计算机设备和存储介质与流程
本申请涉及自动控制,特别是涉及一种目标对象控制方法、装置、计算机设备和存储介质。
背景技术:
1、随着科技的发展,为了进一步探索自然环境,出现了针对目标对象的自动控制技术,该技术的核心主要是控制目标对象在每个指定时刻行驶至对应的指定位置,从而使得目标对象的实际行驶轨迹符合预设轨迹。例如,海洋环境中,目标对象可以是欠驱动水面船,可以通过控制欠驱动水面船执行探索任务。
2、传统技术中,通常是针对目标对象建立数学模型,基于数学模型生成的控制信号控制目标对象。然而,在实际行驶过程中,外界环境通常存在未知的干扰,比如,海洋环境中的海洋扰动,在这些干扰存在的情况下难以得到准确的数学模型参数,导致目标对象的控制不够精准。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高控制精度的目标对象控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
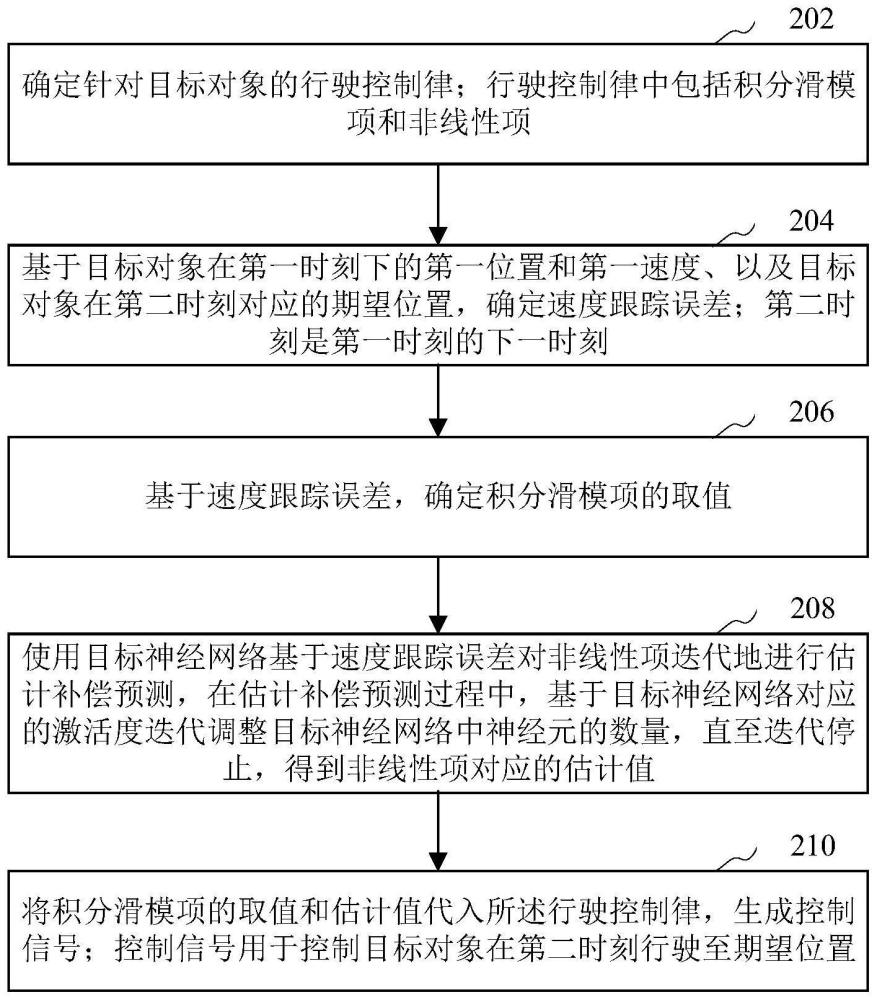
2、第一方面,本申请提供了一种目标对象控制方法。所述方法包括:确定针对目标对象的行驶控制律;所述行驶控制律中包括积分滑模项和非线性项;基于所述目标对象在第一时刻下的第一位置和第一速度、以及所述目标对象在第二时刻对应的期望位置,确定速度跟踪误差;所述第二时刻是所述第一时刻的下一时刻;基于所述速度跟踪误差,确定所述积分滑模项的取值;使用目标神经网络基于所述速度跟踪误差对所述非线性项迭代地进行估计补偿预测,在估计补偿预测过程中,基于所述目标神经网络对应的激活度迭代调整所述目标神经网络中神经元的数量,直至迭代停止,得到所述非线性项对应的估计值;将所述积分滑模项的取值和所述估计值代入所述行驶控制律,生成控制信号;所述控制信号用于控制所述目标对象在所述第二时刻行驶至所述期望位置。
3、第二方面,本申请还提供了一种目标对象控制装置。所述装置包括:控制律确定模块,用于确定针对目标对象的行驶控制律;所述行驶控制律中包括积分滑模项和非线性项;速度误差确定模块,用于基于所述目标对象在第一时刻下的第一位置和第一速度、以及所述目标对象在第二时刻对应的期望位置,确定速度跟踪误差;所述第二时刻是所述第一时刻的下一时刻;滑模计算模块,用于基于所述速度跟踪误差,确定所述积分滑模项的取值;估计补偿模块,用于使用目标神经网络基于所述速度跟踪误差对所述非线性项迭代地进行估计补偿预测,在估计补偿预测过程中,基于所述目标神经网络对应的激活度迭代调整所述目标神经网络中神经元的数量,直至迭代停止,得到所述非线性项对应的估计值;控制信号生成模块,用于将所述积分滑模项的取值和所述估计值代入所述行驶控制律,生成控制信号;所述控制信号用于控制所述目标对象在所述第二时刻行驶至所述期望位置。
4、在一些实施例中,所述估计补偿模块还用于:在估计补偿预测的每轮迭代过程中,基于所述目标神经网络的激活函数和所述速度跟踪误差确定每个所述神经元对应的激活度;基于各所述神经元的激活度调整所述目标神经网络中神经元的数量,得到调整后的目标神经网络;根据所述调整后的目标神经网络中各神经元对应的神经元权重,确定所述调整后的目标神经网络对应的权重参数;在所述权重参数达到理想权重参数的情况下停止迭代,并使用对应于所述理想权重参数的目标神经网络基于所述速度跟踪误差,确定所述非线性项对应的估计值。
5、在一些实施例中,所述估计补偿模块还用于:从各所述神经元对应的激活度中确定目标激活度;在所述目标激活度小于或等于第一阈值的情况下,在所述目标神经网络中增加新的神经元,得到调整后的目标神经网络;其中,新的神经元对应的神经元权重,是基于所述目标激活度所属的神经元对应的神经元权重确定的。
6、在一些实施例中,所述估计补偿模块还用于:针对每个神经元,基于所述神经元对应的激活度计算所述神经元对应的索引值;在所述神经元的索引值小于或等于第二阈值的情况下,删除所述神经元,得到调整后的目标神经网络。
7、在一些实施例中,所述速度误差确定模块还用于:确定针对所述目标对象的虚拟速度控制律;将所述第一位置和所述期望位置代入所述虚拟速度控制律,得到所述目标对象对应的期望速度;根据所述第一速度与所述期望速度之间的差值确定所述速度跟踪误差。
8、在一些实施例中,所述控制律确定模块还用于:针对所述目标对象,建立带有控制信号的输入时滞的动力学模型;对所述动力学模型进行模型转换,得到速度跟踪误差对应的微分方程式;所述微分方程式中包括所述输入时滞;针对所述速度跟踪误差确定积分滑模面;基于所述积分滑模面和速度跟踪误差对应的微分方程式,得到带有所述输入时滞的行驶控制律。
9、在一些实施例中,所述行驶控制律包括纵荡控制律和艏摇控制律;所述速度跟踪误差包括纵荡速度跟踪误差和横荡速度跟踪误差;所述积分滑模面包括所述纵荡速度跟踪误差对应的一阶积分滑模面和所述横荡速度跟踪误差对应的二阶积分滑模面;所述控制律确定模块还用于:基于所述一阶积分滑模面和所述纵荡速度跟踪误差对应的微分方程式,得到带有所述输入时滞的纵荡控制律;基于所述二阶积分滑模面和所述横荡速度跟踪误差对应的微分方程式,得到带有所述输入时滞的艏摇控制律。
10、在一些实施例中,所述目标对象为欠驱动水面船;在生成控制信号之后,所述装置还用于:向所述欠驱动水面船发送所述控制信号;所述欠驱动水面船接收所述控制信号,并根据所述控制信号在所述第二时刻行驶至所述期望位置。
11、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述目标对象控制方法中的步骤。
12、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述目标对象控制方法中的步骤。
13、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述目标对象控制方法中的步骤。
14、上述目标对象控制方法、装置、计算机设备、存储介质和计算机程序产品,通过针对行驶控制律中计算复杂的非线性项,使用目标神经网络基于速度跟踪误差对非线性项迭代地进行估计补偿预测,在估计补偿预测过程中,基于目标神经网络对应的激活度迭代调整目标神经网络中神经元的数量,直至迭代停止,得到非线性项对应的估计值,由于目标神经网络中神经元的数量可以在线实时更新,使得估计补偿的结果更加准确,将积分滑模项的取值和估计值代入行驶控制律,生成的控制信号更加准确,从而利用控制信号能更加精准的进行目标对象控制。
技术特征:
1.一种目标对象控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述在估计补偿预测过程中,基于所述目标神经网络对应的激活度迭代调整所述目标神经网络中神经元的数量,直至迭代停止,得到所述非线性项对应的估计值,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于各所述神经元的激活度调整所述目标神经网络中神经元的数量,得到调整后的目标神经网络,包括:
4.根据权利要求2所述的方法,其特征在于,所述基于各所述神经元的激活度调整所述目标神经网络中神经元的数量,得到调整后的目标神经网络,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述目标对象在第一时刻下的第一位置和第一速度、以及所述目标对象在第二时刻对应的期望位置,确定速度跟踪误差,包括:
6.根据权利要求1所述的方法,其特征在于,所述确定针对目标对象的行驶控制律,包括:
7.根据权利要求6所述的方法,其特征在于,所述行驶控制律包括纵荡控制律和艏摇控制律;所述速度跟踪误差包括纵荡速度跟踪误差和横荡速度跟踪误差;所述积分滑模面包括所述纵荡速度跟踪误差对应的一阶积分滑模面和所述横荡速度跟踪误差对应的二阶积分滑模面;所述基于所述积分滑模面和速度跟踪误差对应的微分方程式,得到带有所述输入时滞的行驶控制律,包括:
8.根据权利要求1所述的方法,其特征在于,所述目标对象为欠驱动水面船;在生成控制信号之后,所述方法还包括:
9.一种目标对象控制装置,其特征在于,所述装置包括:
10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本申请涉及一种目标对象控制方法、装置、计算机设备和存储介质。方法包括:确定针对目标对象的行驶控制律;基于目标对象在第一时刻下的第一位置和第一速度、以及目标对象在第二时刻对应的期望位置,确定速度跟踪误差;基于速度跟踪误差,确定积分滑模项的取值;使用目标神经网络基于速度跟踪误差对非线性项迭代地进行估计补偿预测,在估计补偿预测过程中,基于目标神经网络对应的激活度迭代调整目标神经网络中神经元的数量,直至迭代停止,得到非线性项对应的估计值;将积分滑模项的取值和估计值代入行驶控制律,生成控制信号;控制信号用于控制目标对象在第二时刻行驶至期望位置。采用本方法能够提高目标对象的控制精度。
技术研发人员:陈云,全鹏,孙凯,黄国昆,赵明,叶屹洲,蒋振霖
受保护的技术使用者:天合光能股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!