一种基于FFRLS算法的机床进给轴参数辨识方法
本发明涉及参数辨识,具体涉及一种基于ffrls算法的机床进给轴参数辨识方法。
背景技术:
1、数控机床具有高速、高精度、复合、智能等特点,是船舶、航空航天、轨道交通等领域的重要制造装备。数控机床的动态性能是机床性能的一项重要指标,动态性能将直接影响机床工作性能和加工精度。
2、进给传动系统是将电动机的运转(通常为旋转)转换为机床工作台直线进给运动的整个机械传动链,加工件的最终坐标位置精度和轮廓精度都与机床的传动结构的几何精度、传动精度、灵敏度和稳定性密切相关。因此,为了提高机床进给系统的动态性能、跟踪精度和加工效率,在线优化控制参数和匹配伺服进给系统的控制参数显得尤为重要。
3、建立机床进给系统精确的动力学模型对于研究系统的动态性能有着重要的作用,但这之中存在着部分机械参数难以测量、部分参数会随着不同工况而变化等问题,如丝杆刚度,阻尼系数,粘滞摩擦系数等,降低动力学模型的准确性,甚至影响系统运行的稳定性。目前,已有大量关于机床进给系统相关参数在线辨识的研究,例如,中国专利cn113467367a、cn109947048a和cn116560301a。
4、目前,关于机床进给轴传动链机械参数辨识方法大多基于单惯量刚性系统辨识,此类辨识方法仅能辨识刚度较大的系统,部分刚度较小的传动件会影响单惯量刚性系统辨识结果。在高速度、高加速度或重载等情况下,由于传动零件、联接部分刚性不足,需要考虑刚性较弱的零部件弹性和变形,才能较好地反映其动态特性。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于ffrls算法的机床进给轴参数辨识方法,本发明利用ffrls算法,能够在机床参数未知的情况下,仅通过采集机床运行数据对机床进给轴机械参数进行精准辨识,解决了机床进给轴机械参数、结合面参数难以测量的问题;实现了读取机床运行实测数据,将实测数据结合ffrls算法,能够实时地对机床进给轴机械参数进行辨识,获得机床进给轴的双弹簧阻尼系统的机械参数。
2、本发明提供了一种基于ffrls算法的机床进给轴参数辨识方法,具体涉及一种基于ffrls算法的机床进给轴的双弹簧阻尼系统辨识方法,包括:
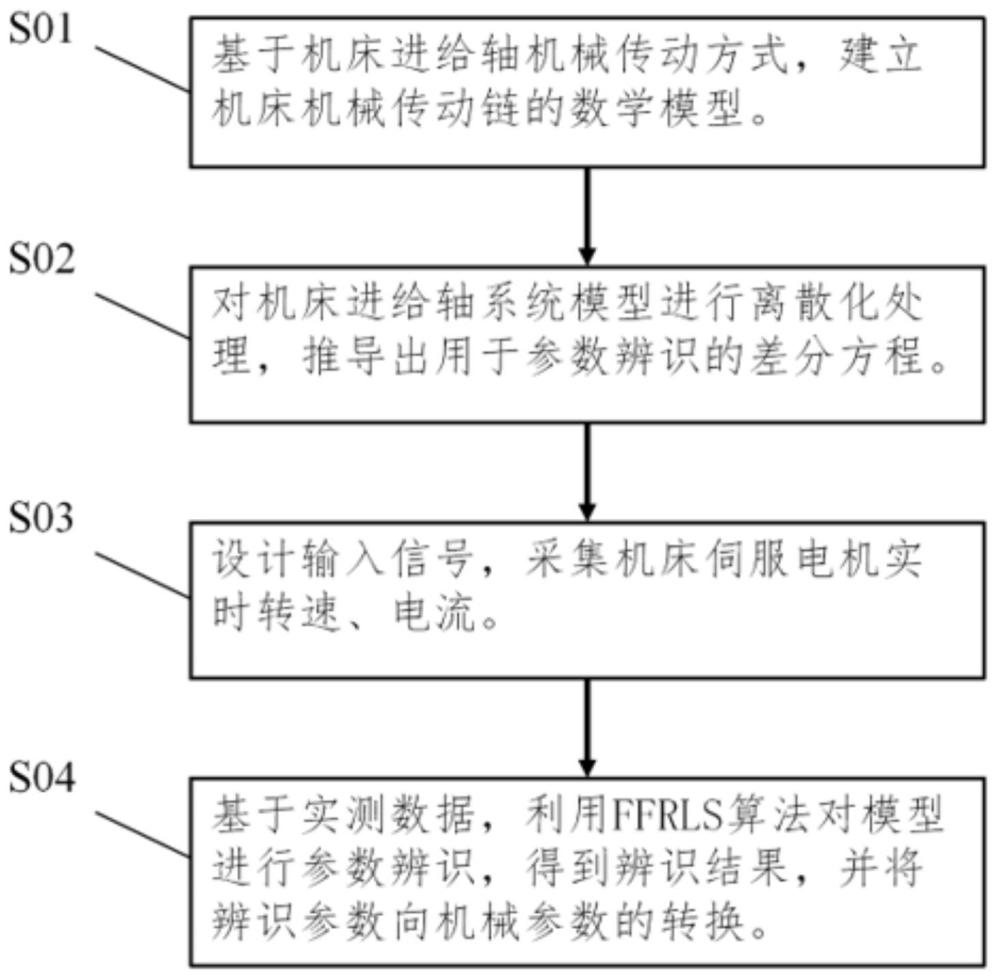
3、步骤s1:基于机床进给轴机械传动方式,建立机床进给轴传动模型;
4、步骤s2:对机床进给轴传动模型进行离散化处理,获得离散化结果,基于所述离散化结果,建立机床进给轴参数辨识模型;
5、步骤s3:将辨识信号输入所述机床进给轴传动模型,采集机床运行数据;
6、基于所述机床运行数据对所述机床进给轴参数辨识模型进行训练获得更新机床进给轴参数辨识模型;
7、将所述机床运行数据输入所述更新机床进给轴参数辨识模型,基于ffrls递推最小二乘估计算法进行计算,输出辨识参数;
8、步骤s4:将所述辨识参数转化为机床进给轴机械参数。
9、优选的,步骤s1所述机床进给轴机械传动方式为丝杠螺母传动或齿轮齿条传动。
10、所述机床进给轴传动模型表达式为:
11、
12、其中, t为电机输出转矩; j为转动部件等效转动惯量,为电机转子角加速度,为转动部件等效转动阻尼;为电机转子角速度; r为电机总体减速比;为转动部件至龙门立柱的推动力, k为转动部件等效刚度,为电机转子转动角度; x为机床工作台位移,机床的电机经过进给传动系统将动力和运动传动给机床工作台,机床工作台用于机床加工工作平面使用; c为转动部件等效阻尼;为机床工作台速度,为机床工作台加速度; m为转动部件等效质量,为转动部件等效平动阻尼; f为转动部件切削力,在空载的情况下,切削力 f为0。
13、优选的,步骤s2所述获得机床进给轴参数辨识模型的具体步骤包括:
14、设置机床运行状态为空载,将电机转矩和电机转速作为机床进给轴传动模型的输入和输出,建立辨识算法的传递函数;
15、将所述辨识算法的传递函数变化为频域的零极点表达形式,获得更新辨识算法的传递函数;
16、所述辨识算法的传递函数表达式为:
17、
18、其中,为辨识算法的传递函数值;为电机转速的拉普拉斯变换值,为电机输出转矩的拉普拉斯变换值; s为拉普拉斯变换后的复频率; m为等效质量, r为总体减速比, c为等效阻尼,为等效平动阻尼; k为有等效刚度, j为等效转动惯量,为等效转动阻尼。
19、对上述传递函数进行简化,获得简化后的更新辨识算法的传递函数,表达式为:
20、
21、其中,为简化后的更新辨识算法的传递函数值;bn为分子待定系数,an为分母待定系数;n=1,2,3。
22、离散化处理为:将简化后的更新辨识算法的传递函数按照零极点匹配规则从连续域转入离散域,获得辨识算法的离散传递函数,表达式为:
23、
24、其中,为辨识算法的离散传递函数值; z为离散化后的复变量。
25、将辨识算法的离散传递函数进行化简并改写为最小二乘形式,获得更新辨识算法的离散传递函数,即离散化结果,表达式为:
26、
27、其中,为离散化后的电机转速;为离散化后的电机输出转矩;θc为待辨识参数向量,c=1,2,3,4,5,6。
28、基于所述更新辨识算法的离散传递函数获得机床进给轴参数辨识模型,表达式为:
29、
30、其中,为第k次采样得到的电机转速数据,k=1,2,3,…u,u表示采样总次数;t(k-1)为第k-1次采样得到的电机输出转矩数据;
31、优选的,步骤s3所述辨识信号为输入进给轴的运动速度信号;例如扫频信号、正弦信号或方波信号。
32、优选的,所述运行数据为电机电流和电机转速。
33、优选的,步骤s3所述获得更新机床进给轴参数辨识模型,具体包括:
34、将辨识信号输入步骤s1所述机床进给轴传动模型获得对应的电机电流和电机转速;
35、再将获得的电机电流和电机转速作为机床进给轴参数辨识模型的输入和输出,进行训练,获得更新机床进给轴参数辨识模型。
36、优选的,步骤s3所述ffrls递推最小二乘估计算法,表达式为:
37、
38、其中,kk为第k次采样得到的参数向量对上一次采样得到的估计参数向量的修正矩阵,具体为当第k次采样对应的参数向量与估计参数向量存在误差时,对上一次采样后得到的估计参数向量中的参数进行修正的幅度;为第k-1次采样得到的参数向量对上一次采样得到的估计参数向量的协矩阵,协矩阵的值越小代表第k次采样后得到的估计参数越接近真值;为第k次采样得到的参数向量,为遗忘因子,代表采样数据对估计参数向量的影响权重;为第k次采样得到的参数向量转置值;为第k次采样获取的待辨识参数向量,为第k-1次采样获取的待辨识参数向量;为第k-1次采样得到的电机转速数据; pk为第k次采样得到的参数向量对上一次采样得到的估计参数向量的协矩阵,i为电机电流。
39、优选的,步骤s4所述机床进给轴机械参数为机床进给轴的双弹簧阻尼系统。
40、本发明基于ffrls递推最小二乘估计算法对机床进给轴参数进行参数辨识,通过选取适当的参数辨识初值与待辨识参数,将电机电流与电机转速的运行数据分别作为辨识算法函数的输入与输出,带入更新机床进给轴参数辨识模型进行递推;通过设定一个较小的参考值对参数向量的变化大小进行判定,当多次输入新的实测数据后,参数向量的各参数修改值都小于,可以认为辨识参数已经收敛;根据上文的推导过程,可以将辨识结果转换为机械参数,最终得到待求的系统机械参数。
41、与现有技术相比,本发明至少具有现如下有益效果:
42、(1)本发明的辨识算法能够适配多种传动形式,包含了常见的机床传动链形式,如齿轮齿条传动、丝杠螺母传动,无需针对不同传动形式开发不同的参数辨识算法,能够适用于大部分机床;
43、(2)本发明能够全面地对机床进给轴各个机械参数进行辨识,包括结合面参数、转动件与平动件参数,能够根据辨识参数快速建立机床动力学模型并进行动力学分析;
44、(3)本发明支持运行过程中的在线辨识,通过递推最小二乘算法,能够实现在机床运行过程中自动辨识参数,无需单独导出运行数据运行辨识算法,这提高了辨识算法的运算速度。
- 还没有人留言评论。精彩留言会获得点赞!