一种无人帆船路径跟踪的固定时间制导方法
:本发明涉及一种无人帆船路径跟踪的固定时间制导方法。
背景技术
0、
背景技术:
1、无人帆船由风帆作为动力来推进,相较于传统的海洋航行器具有航程远、航时长的优势,已在海洋环境观测、海洋生物调查、海洋监视和侦查等领域中发挥重要作用。
2、作为一种典型的欠驱动系统,无人帆船的路径跟踪控制由制导律和控制器共同实现,通过获得跟踪过程中期望的航向角,将帆船的路径跟踪问题简化为航向控制问题,控制简单、收敛性好,在欠驱动船舶路径跟踪控制中得到了广泛的应用;然而无人帆船是靠风帆进行推进,逆风和顺风航行时速度极低,传统的视线制导原则不适用,帆船在航行中风帆会受到较大的横向力,相较于常规船舶产生的侧滑角更大。
3、侧滑角对于路径跟踪的精度有着显著的影响,目前的帆船侧滑角观测器存在未知时变侧滑角变大无法精准观测的问题,导致产生较大的观测误差,进而影响路径跟踪的精度和性能;同时,目前帆船视线法制导的跟踪误差的收敛速度较低,无法使观测误差在固定时间内收敛到原点附近,也会影响无人帆船路径跟踪的稳定性和鲁棒性。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了一种无人帆船路径跟踪的固定时间制导方法,方法设计合理,采用双固定时间观测器来精准观测未知时变的大侧滑角,基于固定时间制导律来提高跟踪误差收敛到原点附近的速度,使观测误差在固定时间内收敛到零,提升了路径跟踪的精度和性能,同时还包括逆风模式,顺风模式和路径跟踪模式三种工作模式,能够使无人帆船更快的收敛于参考路径,提升了视线制导法的收敛速度和鲁棒性,相较于有限时间制导法,稳定时间与初始状态无关,能更快收敛,具有更好的稳定性,解决了现有技术中存在的问题。
2、本发明为解决上述技术问题所采用的技术方案是:
3、一种无人帆船路径跟踪的固定时间制导方法,所述制导方法包括以下步骤:
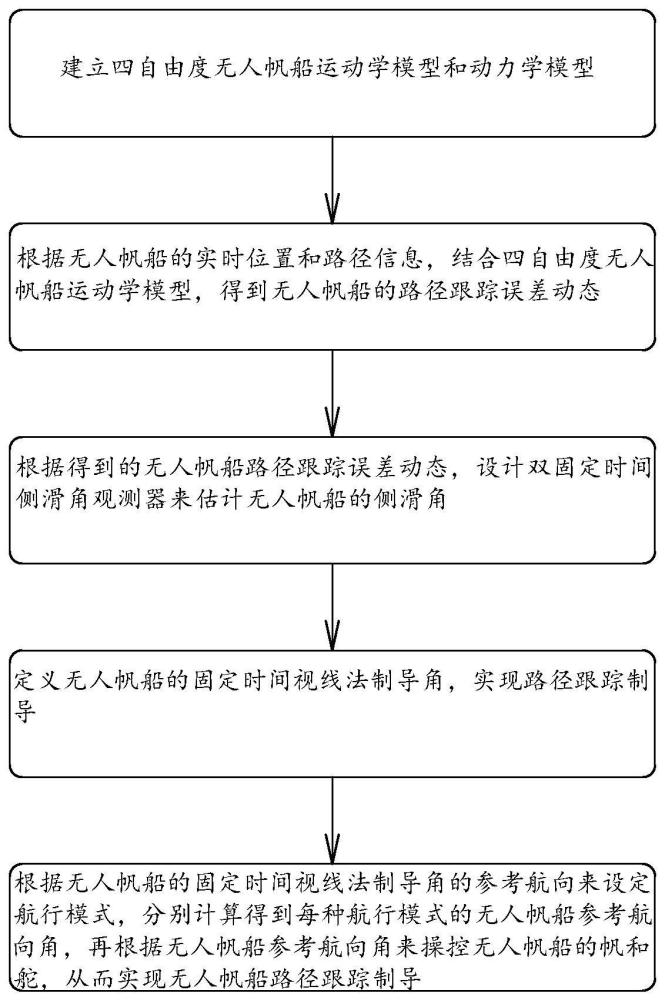
4、s1,建立四自由度无人帆船运动学模型和动力学模型为:
5、
6、
7、其中,x表示帆船位置的横坐标,y表示帆船位置的纵坐标,ψ表示帆船的艏向,φ表示帆船的横摇,表示求导运算,u表示帆船的前进方向速度,v表示帆船的横向速度,p表示帆船的横摇角速度,r表示帆船的艏摇角速度。m是帆船的总质量,和是纵荡和横荡附加质量,izz和ixx是纵荡,垂荡惯性矩,和nr是附加惯性矩,fxi和fyi分别用i=s,r,h,k表示帆、舵、船体和龙骨在纵荡和横荡方向的受力,mxi和mzi分别表示横摇和艏摇力矩;
8、s2,在满足航海实践情况下确定航路点,进而生成一条包含所有航路点的参数化路径,根据无人帆船的实时位置和路径信息,结合四自由度无人帆船运动学模型,得到无人帆船的路径跟踪误差动态;
9、s3,根据得到的无人帆船路径跟踪误差动态,设计双固定时间侧滑角观测器来估计无人帆船的侧滑角,所述双固定时间侧滑角观测器为:
10、
11、
12、其中g1=ucos(ψ-ψr+β),g2=usin(ψ-ψr+β),和分别是xe和g1的估计值,和分别是ye和g2的估计值,是β的估计值;为观测器的误差,且sigh(·)=|·|hsign(·),λβk(k=1,2,3,4),μm(m=1,2,3,4)和κn(n=1,2)均为正的调节参数,0<αi(i=1,2,3,4)<1,ρi(i=1,2,3,4)>1,满足αi=iα-(i-1),ρi=iρ-(i-1)和α∈(1-ε1,1),ρ∈(1,1+ε2),其中ε1和ε2是足够小的正数;
13、s4,定义无人帆船的固定时间视线法制导角,实现路径跟踪制导,将无人帆船的固定时间视线法制导角定义为:
14、
15、其中:δ为前视距离,ky1和ky2为正的调节参数,0<m<1,n>1;
16、s5,根据无人帆船的固定时间视线法制导角的参考航向来设定逆风航行模式、顺风航行模式和路径跟踪模式,分别计算得到每种制导模式的无人帆船参考航向角,再根据无人帆船参考航向角来操控无人帆船的帆和舵,从而实现无人帆船路径跟踪制导。
17、所述路径跟踪误差为:
18、
19、其中,θ为路径参数变量,任意参考路径的坐标点可表示为(xr(θ),yr(θ)),路径的正切角表示为ψr=arctan(y'r/x'r),其中和xe为帆船的横坐标与参考点的横坐标的误差,ye为帆船的纵坐标与参考点的纵坐标的误差。
20、对xe和ye求导,得到无人帆船的路径跟踪误差动态:
21、
22、将无人帆船的合速度定义为:
23、
24、将无人帆船的侧滑角角定义为:
25、β=arctan(vcos(φ)/u),
26、将虚拟参考点移动速度定义为:
27、
28、参考路径与正北方向夹角的导数为:
29、
30、所述无人帆船的侧滑角估计为:
31、
32、所述观测器的辅助状态误差定义为
33、对于逆风航行模式,参考航向ψdl处于逆风区,且满足为逆风区的边界,为实现抢风操纵,定义符号函数s(t)为:
34、s(t)=sign(ye(t)+ky1sigm(ye(t))+ky2sign(ye(t))+yd1sign(s(t-1)))
35、其中,yd1为逆风航行区的宽度限制;
36、因此,逆风区的参考航向角表示为:
37、
38、对于顺风航行模式,参考航向ψdl处于顺风区,且满足为顺风区的边界,为实现顺风换舷,定义符号函数s(t)为:
39、s(t)=sign(ye(t)+ky1sigm(ye(t))+ky2sign(ye(t))+yd2sign(s(t-1)))
40、其中yd2为顺风航行区的宽度限制;
41、因此,顺风区的参考航向角ψd表示为:
42、
43、对于路径跟踪模式,参考航向ψdl处于横风区,横风区的参考航向角ψd表示为:
44、ψd=ψdl。
45、为保证纵向误差xe的收敛,设计虚拟速度up为:
46、up=kx0xe+ucos(ψ-ψr+β)+kx1sigm(xe)+kx2sign(xe)
47、其中kx0、kx1和kx2为正的调节参数,由此得到路径变量θ的更新率为:
48、
49、进而可以得到无人帆船的固定时间路径跟踪误差动态更新率为:
50、
51、
52、为证明所设计的制导系统固定时间稳定,设计李雅普诺夫函数如下所示:
53、
54、对vθ求导可得:
55、
56、其中
57、进一步整理可得:
58、
59、其中:
60、因此存在使路径跟踪误差xe,ye在固定时间内趋近于原点附近。
61、本发明采用上述结构,提出了一种基于双固定时间侧滑角观测器的固定时间视线法制导律,对于未知侧滑角,设计双固定时间观测器来精准观测,使观测误差在固定时间内收敛到零;视线法是固定时间稳定的,稳定时间与初始状态无关,能更快收敛,具有更好的稳定性;通过建立四自由度无人帆船运动学模型和动力学模型结合无人帆船的实时位置和路径信息得到无人帆船的路径跟踪误差动态;通过双固定时间侧滑角观测器来估计无人帆船的侧滑角,通过定义无人帆船的固定时间视线法制导角,实现路径跟踪制导;通过无人帆船参考航向角来操控无人帆船的帆和舵,从而实现无人帆船路径跟踪制导具有稳定实用、简便高效的优点。
- 还没有人留言评论。精彩留言会获得点赞!