一种煤矿综采工作面自动化控制方法及系统与流程
本发明涉及煤矿采集控制,尤其涉及一种煤矿综采工作面自动化控制方法及系统。
背景技术:
1、煤矿是天然形成的煤层地质体,是一种重要的能源资源,煤是在很久以前,在没有氧气的环境下,由植物和其他有机物经过长时间的变质形成的,煤是目前世界上主要的能源来源之一,采煤可以满足工业生产和民生消费对煤的需求,同时煤炭开采可以带动相关行业的发展,煤炭行业采掘加工就能吸纳大量劳动力,煤层资源广泛分布,大规模采掘可以有效开发利用天然资源,同时也防止资源浪费。
2、而煤矿综采工作面是指采用综合机械化方法一次性开采整个煤层的工作面,具体来说,综采工作面采用多种采煤设备联合作业,如采煤机、输送机、液压支架等进行机械化开采,综采工作面可以一次性开采整个煤层,大大提高采煤效率,综采工作面采用液压支护技术,实现工作面自动化支护,保证采空区的安全,简单来说煤矿综采工作面就是采用多种采煤设备联合作业,一次性机械化开采整个煤层的工作面,是目前煤矿主流的高效开采形式,实现了煤层全面机械化开采。
3、但是现有的煤矿综采工作面控制平台中无法根据煤矿的变化形态判断是否有塌方风险,进而不能够评估煤层变形情况,失去了对工作面安全隐患的及时预警能力,可能导致塌方事故在自动控制下无法及时发现和处理,缺乏对煤层应力变化的动态监测,难以准确判断工作面区域内的安全状态,故认为不能根据煤层变化判断塌方风险是煤矿自动控制系统的一个重要短板,会影响采煤工作的安全管理。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明为了解决上述问题,提出了一种煤矿综采工作面自动化控制方法及系统,实现工作面安全风险的动态监测和评估,为整个开采过程的安全管理奠定基础的目的。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种煤矿综采工作面自动化控制方法,该煤矿综采工作面自动化控制方法包括以下步骤:
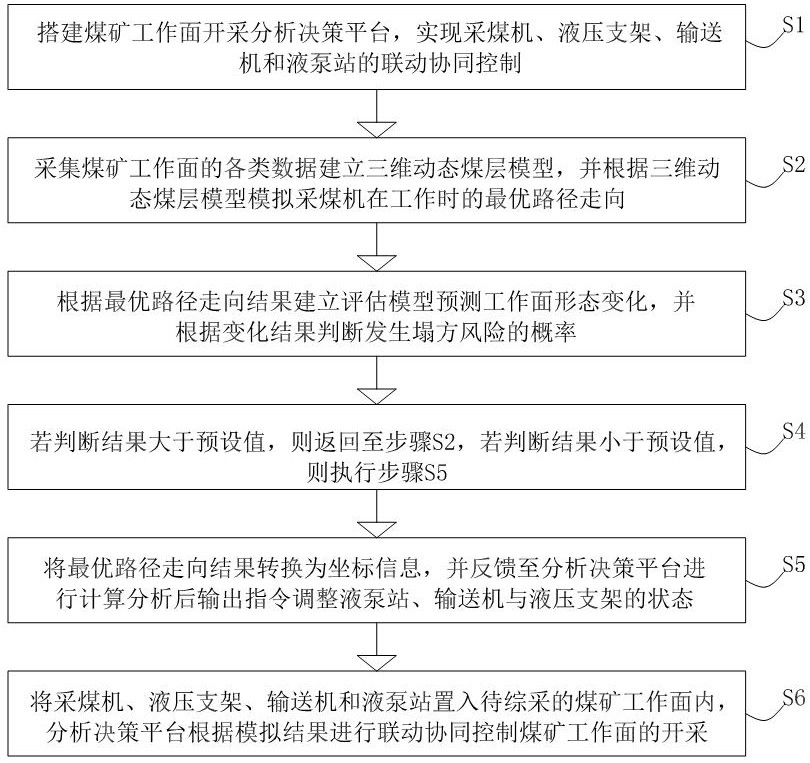
4、s1、搭建煤矿工作面开采分析决策平台,实现采煤机、液压支架、输送机和液泵站的联动协同控制;
5、s2、采集煤矿工作面的各类数据建立三维动态煤层模型,并根据三维动态煤层模型模拟采煤机在工作时的最优路径走向;
6、s3、根据最优路径走向结果建立评估模型预测工作面形态变化,并根据变化结果判断发生塌方风险的概率;
7、s4、若判断结果大于预设值,则返回至步骤s2,若判断结果小于预设值,则执行步骤s5;
8、s5、将最优路径走向结果转换为坐标信息,并反馈至分析决策平台进行计算分析后输出指令调整液泵站、输送机与液压支架的状态;
9、s6、将采煤机、液压支架、输送机和液泵站置入待综采的煤矿工作面内,分析决策平台根据模拟结果进行联动协同控制煤矿工作面的开采。
10、作为可选择的实施方式,采集煤矿工作面的各类数据建立三维动态煤层模型,并根据三维动态煤层模型模拟采煤机在工作时的最优路径走向包括以下步骤:
11、s21、利用三维激光扫描仪采用非接触式高速激光的测量方式,对煤矿工作面进行快速扫描测量,获得点云数据,点云数据包括煤矿地质数据、工作面运输巷及回风巷地质写实数据;
12、s22、在对点云数据进行配准、降噪处理后导入建模软件内构建初级煤层模型,并导出进行渲染完善模型细节,完成的三维煤层模型的构建;
13、s23、对三维煤层模型进行网格化处理生成实体有限单元模型,并导入至三维有限差分软件生成三维动态煤层模型;
14、s24、根据采煤机参数建立采煤机动力学模型,并根据采煤目标量建立最优路径走向函数;
15、s25、利用最优路径走向函数在三维动态煤层模型上搜索评估采煤机路径走向,并从采煤机路径走向中找寻最优路径作为模拟结果。
16、作为可选择的实施方式,根据采煤机参数建立采煤机动力学模型,并根据采煤目标量建立最优路径走向函数包括以下步骤:
17、s241、根据采煤机的实际结构与规格,采集采煤机运动模拟过程中的参数集数据,并对其进行滤波处理,参数集数据包括采煤机动力参数、运动学参数、性能参数、尺寸参数、牵引力限制参数及攀爬能力;
18、s242、建立采煤机运动学和动力学模型的数学表达式;
19、s243、根据参数集数据与动力学模型数学表达式应用加权后的最小二乘法辨别采煤机的模型参数,得到动力学最小惯性参数集的值完成采煤机动力学模型的构建;
20、s244、根据采矿设计任务书确定采煤机采煤目标量,并基于采煤目标量建立最优路径走向函数。
21、作为可选择的实施方式,最优路径走向函数的表达式为:;式中,emin表示路径优化目标值;xk表示采煤机的位置;nk表示采煤机采煤时的采煤目标量;eij表示采煤路径中起始点 i与终点 j点之间的距离;xij表示采煤路径中起始点 i与终点 j点的位置。
22、作为可选择的实施方式,利用最优路径走向函数在三维动态煤层模型上搜索评估采煤机路径走向,并从采煤机路径走向中找寻最优路径作为模拟结果包括以下步骤:
23、s251、根据最优路径走向函数在三维动态煤层模型上生成不同路径走向的方案,并对各方案内的参数进行初始化处理;
24、s252、根据采煤机的位置设定最大迭代次数确定边界值区间,计算采煤机适用度值获取采煤机的最优位置,并更新采煤机位置;
25、s253、对比原始采煤机与更新后采煤机的适用度值,若计算结果的优化程度大于原始适用度值,则将原始采煤机位置更新替换为更新后的采煤机位置;
26、s254、计算所有方案内采煤机的适应度值,确定全局最优解,并判断是否符合设置的最优路径走向函数;
27、s255、若结果符合则停止迭代输出最优路径,若结果不符合,则返回值步骤s252至步骤s254。
28、作为可选择的实施方式,根据最优路径走向结果建立评估模型预测工作面形态变化,并根据变化结果判断发生塌方风险的概率包括以下步骤:
29、s31、对塌方风险评估概念进行界定形成知识库,并根据本体论建立历史塌方数据与煤矿工作面地质数据的煤矿环境本体模型;
30、s32、将最优路径信息生成语义描述信息,构建评估模型预测采煤完成的工作面形态变化;
31、s33、依据预测的形态变化结果评估发生塌方的潜在风险,并根据贝叶斯网络模型对潜在风险进行概率评估。
32、作为可选择的实施方式,将最优路径信息生成语义描述信息,构建评估模型预测采煤完成的工作面形态变化包括以下步骤:
33、s321、通过语义描述技术将最优路径信息生成语义描述信息,并依据煤矿环境本体模型对采矿场景进行实例化生成知识图谱;
34、s322、将知识图谱的语义描述语句进行语义转换生成编程语言描述,并推送至推理机;
35、s323、通过推理机将最优路径信息与知识库中的判断规则进行匹配;
36、s324、将匹配结果按照从高至低的顺序进行排序,并建立对应的结果模型;
37、s325、评估匹配结果高的结果模型的可靠度,并选择可靠度最高的结果模型作为评估模型,实现采煤完成工作面形态变化的预测。
38、作为可选择的实施方式,依据预测的形态变化结果评估发生塌方的潜在风险,并根据贝叶斯网络模型对潜在风险进行概率评估包括以下步骤:
39、s331、解析预测模型输出的形态变化结果,确定影响塌方风险的因素;
40、s332、利用历史塌方事故数据统计各潜在风险因素与塌方发生的对应关系,获取先验概率;
41、s333、根据专家知识描述各潜在因素之间的条件依赖关系,获取条件概率表;
42、s334、整合先验概率与条件概率表构建贝叶斯网络模型,并利用历史塌方数据与相关因素训练贝叶斯网络模型;
43、s335、将形态变化结果作为输入至贝叶斯网络模型,运行贝叶斯网络模型得到塌方风险的概率。
44、作为可选择的实施方式,将最优路径走向结果转换为坐标信息,并反馈至分析决策平台进行计算分析后输出指令调整液泵站、输送机与液压支架的状态包括以下步骤:
45、s51、将最优路径按照采煤机的移动顺序从三维动态煤层模型中生成坐标点,并将坐标点传输至决策平台;
46、s52、将液泵站、输送机与液压支架按照最优路径的线路输入至三维动态煤层模型中;
47、s53、根据输送机与采煤机输出的坐标轨迹进行实时比对,判断采煤机与输送机的移动中心线是否处于重合或者平行状态;
48、s54、若处于重合或者平行状态则继续运行,若未处于重合或者平行状态则执行步骤s55;
49、s55、分析输送机与采煤机偏差误差的变化,将变化坐标传输至分析决策平台对其进行计算分析输出成指令;
50、s56、调节液泵站的供液流量和输出压力调控液压支架的推移伸出量,对输送机进行调直,直至采煤机与输送机的移动中心线处于重合或者平行状态。
51、第二方面,本发明还提供了一种煤矿综采工作面自动化控制系统,该煤矿综采工作面自动化控制系统包括:决策平台搭建模块、模型构建模拟模块、风险评估判断模块、结果判断回溯模块、状态反馈调整模块及联动协同控制模块;
52、决策平台搭建模块,用于搭建煤矿工作面开采分析决策平台,实现采煤机、液压支架、输送机和液泵站的联动协同控制;
53、模型构建模拟模块,用于采集煤矿工作面的各类数据建立三维动态煤层模型,并根据三维动态煤层模型模拟采煤机在工作时的最优路径走向;
54、风险评估判断模块,用于根据最优路径走向结果建立风险评估模型预测工作面形态变化,并根据变化结果判断发生塌方风险的概率;
55、结果判断回溯模块,用于判断结果大于预设值,则重复模型构建模拟模块,若判断结果小于预设值,则继续执行;
56、状态反馈调整模块,用于将最优路径走向结果转换为坐标信息,并反馈至分析决策平台进行计算分析后输出指令调整液泵站、输送机与液压支架的状态;
57、联动协同控制模块,用于将采煤机、液压支架、输送机和液泵站置入待综采的煤矿工作面内,分析决策平台根据模拟结果进行联动协同控制煤矿工作面的开采。
58、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
59、1、本发明通过搭建分析决策平台,实现各设备的联动协同控制,进而有利于工作面开采的自动化和智能化,提高工作效率,同时通过建立三维动态煤层模型和模拟采煤机最优路径,科学规划工作面开采顺序和路径,提高资源利用率,并建立形态变化评估模型预测塌方风险,可以提前判断安全隐患并调整开采方案,提高工作安全性,最终将最优路径结果转换为坐标信息输出控制指令,实现自动控制设备按计划进行开采,减少人工误差,使得各设备联动协同控制实现工作面自动开采,可以替代危险和重复的人工操作,实时监测和调整开采方案,根据实际情况及时修正,更好适应复杂的地下环境,提高开采质量和效益。
60、2、本发明通过建立三维动态煤层模型并模拟采煤机最优路径走向,通过利用三维激光扫描技术快速获取工作面全面高精度点云数据,真实反映工作面地质结构,同时在点云数据基础上构建三维煤层初级模型,经过网格化和有限单元处理生成三维动态模型动态模拟和反映工作面地质变化情况,并建立采煤机动力学模型,考虑采煤目标和路径函数科学模拟采煤机在不同路径下的运动特性和采煤效率,并在三维动态模型上搜索评估不同路径,使得能够系统评估各路径的优劣势,找到真正的最优路径,达到利用数字化手段建立动态模型,为采煤机路径规划提供依据,提高路径优化水平的目的。
61、3、本发明通过建立评估模型预测工作面形态变化和塌方风险,通过系统总结历史经验,为风险评估提供理论支持,并将最优路径信息进行语义描述,可以对路径信息进行深度挖掘和理解,为形态变化建模提供必要数据,同时依据形态变化结果评估潜在风险,贝叶斯网络对风险进行概率评估,给出定量化的风险水平,通过预测形态变化和风险为后续调整路径和加强防控提供依据,有利于提前防范和减少安全事故,实现了工作面安全风险的动态监测和评估,为整个开采过程的安全管理奠定基础。
62、4、本发明将路径结果转换为坐标信息,为后续自动控制提供数字化数据支持,将液泵站等设备导入三维模型实时监测设备与采煤机的位置关系,通过采煤机和输送机坐标对比实时判断两者是否重合运行,有效监测运行状态,当运行不符合要求时,通过计算分析误差变化,准确定位问题并输出调整指令,同时通过调节液泵站和支架实现输送机的自动调整和重合,实现路径自动跟踪运行。
- 还没有人留言评论。精彩留言会获得点赞!