一种全景化安全运维系统的制作方法
本发明涉及运维系统的,更具体的说是涉及一种全景化安全运维系统。
背景技术:
1、在光伏站运维过程中,光伏站四周的树木生长,对于光伏板的正常使用也产生着影响,当树木生长过程中,树木对光伏板表面进行遮挡,被遮挡的被遮挡的光伏组件、将会消耗有光照的光伏组件所产生的部分能量或所有能量,降低输出功率,严重的遮挡就会引发“热斑效应“,影响光伏板的正常使用,目前的光伏板运维,主要采用无人机以及人工对光伏板进行检测,光伏站的巡检时间不固定,受巡检时间以及天气的影响,无法及时检测到树荫对光伏板的影响。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种全景化安全运维系统,用于克服现有技术中的上述缺陷。
2、为实现上述目的,本发明提供了如下技术方案:
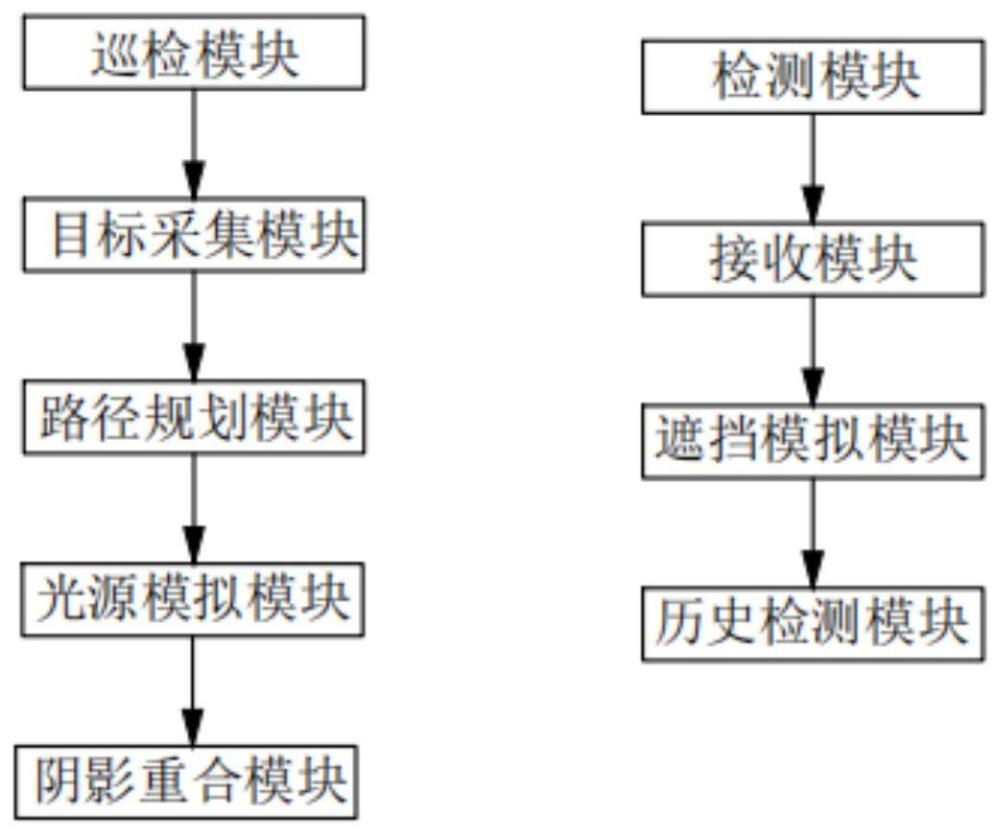
3、一种全景化安全运维系统,包括若干台巡检无人机,每组所述巡检无人机包括巡检模块、目标采集模块、路径规划模块、以及光源模拟模块;
4、所述巡检模块,用于获取光伏站的巡检图;
5、所述目标采集模块,用于获取待检测组件的位置参数;
6、所述路径规划模块,用于获取目标采集模块内的位置参数,并根据太阳照射角度对巡检无人机的飞行路径进行规划,并控制所述巡检无人机飞行;
7、所述光源模拟模块,用于在巡检无人机飞行过程中模拟太阳光,并检测待检测组件是否遮挡光伏板,若所述光伏板表面存在阴影,则生成危险信号,反之则生成安全信号。
8、作为优选,所述巡检无人机上还设置有阴影重合模块,所述阴影重合模块用于获取待检测组件与光伏板重合图像信息,并生成警告信号。
9、作为优选,所述巡检无人机上还预设有检测模块,所述检测模块用于获取所述待检测组件的形状并与预测所述待检测组件的生长方向作为检测信号。
10、作为优选,还包括有模拟无人机,所述模拟无人机上设置有接收模块以及遮挡模拟模块,所述接收模块用于接收所述检测模块内的检测信号以及接收所述路径规划模块内的巡检无人机的飞行路径并生成模拟信息,所述遮挡模拟模块用于接收所述接收模块内的模拟信息并控制所述模拟无人机飞行。
11、作为优选,所述数据接收模块,用于接收巡检任务数据;时间确定模块,用于根据所述巡检任务数据,计算巡检子任务的执行时间;效用确定模块,用于若所述执行时间小于沿两个巡检子任务之间线路的飞行时间,则计算执行任务的边际效用;资源调度模块,用于向协同巡检的机器人发送所述边际效用对应的计算数据量,并接收所述机器人反馈的计算数据量,以在协同巡检的机器人和无人机之间进行资源调度。
12、作为优选,还预设有历史检测模块,所述历史检测模块内预设有危险区域以及对应的危险等级,对比所述待检测组件与危险区域的位置关系,确定危险等级。
13、作为优选,所述巡检模块内设置有巡检子模块,所述巡检子模块通过全自动算法获取所述光伏站的运维设备以及危险点并生成巡检图。
14、作为优选,所述巡检模块内还设置有记录模块,所述记录模块用于记录所述风险点,并根据所述风险点种类在巡检图内进行标记。
15、作为优选,所述巡检模块还设置有分析模块,所述分析模块用于获取所述巡检模块内的运维设备图像并通过对比策略检测运维设备表面是否存在杂质。
16、作为优选,所述巡检模块内还设置有巡检规划模块,用于获取巡检图并生成巡检路线。
17、本发明的有益效果:利用无人机对光伏站四周进行巡检,实现对光伏站内运维设备以及危险点的确定的同时,对光伏站四周的树木进行检测,利用无人机模拟不同时间段太阳对树木的照射,是否存在树叶遮挡光伏板的情况,若树叶对光伏板产生遮挡,则发出危险信号,提醒巡检人员对树木进行修剪,若不产生遮挡,则生产安全信号;同时,利用模拟无人机模拟树木生长方向,对未来一段时间内的树木生长方向进行检测,若预测到树木可能对光伏板产生影响时,则对树木进行提前修剪,避免在巡检间隙内,树木对光伏板的影响,进行预防。
技术特征:
1.一种全景化安全运维系统,其特征在于,包括若干台巡检无人机,每组所述巡检无人机包括巡检模块、目标采集模块、路径规划模块、以及光源模拟模块;
2.根据权利要求1所述的一种全景化安全运维系统,其特征在于,所述巡检无人机上还设置有阴影重合模块,所述阴影重合模块用于获取待检测组件与光伏板重合图像信息,并生成警告信号。
3.根据权利要求1所述的一种全景化安全运维系统,其特征在于,所述巡检无人机上还预设有检测模块,所述检测模块用于获取所述待检测组件的形状并与预测所述待检测组件的生长方向作为检测信号。
4.根据权利要求3所述的一种全景化安全运维系统,其特征在于,还包括有模拟无人机,所述模拟无人机上设置有接收模块以及遮挡模拟模块,所述接收模块用于接收所述检测模块内的检测信号以及接收所述路径规划模块内的巡检无人机的飞行路径并生成模拟信息,所述遮挡模拟模块用于接收所述接收模块内的模拟信息并控制所述模拟无人机飞行。
5.根据权利要求4所述的一种全景化安全运维系统,其特征在于,所述数据接收模块,用于接收巡检任务数据;时间确定模块,用于根据所述巡检任务数据,计算巡检子任务的执行时间;效用确定模块,用于若所述执行时间小于沿两个巡检子任务之间线路的飞行时间,则计算执行任务的边际效用;资源调度模块,用于向协同巡检的机器人发送所述边际效用对应的计算数据量,并接收所述机器人反馈的计算数据量,以在协同巡检的机器人和无人机之间进行资源调度。
6.根据权利要求4所述的一种全景化安全运维系统,其特征在于,还预设有历史检测模块,所述历史检测模块内预设有危险区域以及对应的危险等级,对比所述待检测组件与危险区域的位置关系,确定危险等级。
7.根据权利要求1所述的一种全景化安全运维系统,其特征在于,所述巡检模块内设置有巡检子模块,所述巡检子模块通过全自动算法获取所述光伏站的运维设备以及危险点并生成巡检图。
8.根据权利要求7所述的一种全景化安全运维系统,其特征在于,所述巡检模块内还设置有记录模块,所述记录模块用于记录所述风险点,并根据所述风险点种类在巡检图内进行标记。
9.根据权利要求8所述的一种全景化安全运维系统,其特征在于,所述巡检模块还设置有分析模块,所述分析模块用于获取所述巡检模块内的运维设备图像并通过对比策略检测运维设备表面是否存在杂质。
10.根据权利要求8所述的一种全景化安全运维系统,其特征在于,所述巡检模块内还设置有巡检规划模块,用于获取巡检图并生成巡检路线。
技术总结
本发明创新提供了一种全景化安全运维系统,包括若干台巡检无人机,每组所述巡检无人机包括巡检模块、目标采集模块、路径规划模块、以及光源模拟模块;所述巡检模块,用于获取光伏站的巡检图;所述目标采集模块,用于获取待检测组件的位置参数;所述路径规划模块,用于获取目标采集模块内的位置参数,并根据太阳照射角度对巡检无人机的飞行路径进行规划,并控制所述巡检无人机飞行;所述光源模拟模块,用于在巡检无人机飞行过程中模拟太阳光,并检测待检测组件是否遮挡光伏板,若所述光伏板表面存在阴影,则生成危险信号,反之则生成安全信号。
技术研发人员:章立宗,朱杰,秦建松,陈浩,戚正华,董钦,李勇,张硕彬,沈祥,袁斌,陆晓东,金建舟,朱建国,周洋,金旸栋,汪磊,刘学,郑伟,张炼军,贺明,金钢,罗宁,陈骥峰,何斌,王嘉栋,孙余冰
受保护的技术使用者:绍兴建元电力集团有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!