多智能体磁滞系统分布式输出反馈有限时间一致控制方法
本发明属于多智能体系统跟踪控制,特别是涉及一种多智能体磁滞系统分布式输出反馈有限时间一致控制方法。
背景技术:
1、随着各领域对控制系统精度的要求不断升高,含未知非线性输入环节的多智能体协调控制技术的研究也在逐渐获得新突破。磁滞特性作为一种典型的动态非线性模型,其广泛存在于各种工业设备以及物理系统中,如继电器、电磁场、含智能材质的传感器等。由于磁滞特性具备无记忆性、多值性和不可微性等特点,其通常会影响控制系统的输出精度,甚至将导致整个闭环系统失稳,故消除多智能体执行器内的磁滞效应有助于提高系统输出量的控制精度。目前存在两种解决磁滞问题的控制策略:第一种是构建磁滞的逆过程,并将其级联至系统的输入端;第二种是采用自适应鲁棒控制策略在线消除磁滞现象。由于磁滞逆的构建过程较为复杂,且其输出量又对自身参数较为敏感,故上述自适应鲁棒控制策略更具优势。近年来,学者已采用该自适应鲁棒控制策略提出众多行之有效的方案,并设计了一系列经典的磁滞模型,如bouc-wen磁滞、饱和pi磁滞以及类间隙磁滞等。实际的系统物理模型执行器内可能同时存在磁滞和饱和特性,且系统模型磁滞输出量的测量成本往往是较大的。
2、在传统的一阶线性滤波器的基础上,现有技术通过自适应技术估计各步虚拟控制率一阶导数的上界,据此构造固定时间滤波器令跟踪误差在有限的设定时间内收敛至稳定状态,并将滤波器估计误差的镇定过程与有限时间控制器的设计过程完全分离,此举降低了有限时间控制器的设计难度。然而,上述固定时间滤波器虽然能在固定的时间内达到镇定状态,但其仅致力于确保稳态性能而忽视了瞬态性能控制问题。虽然现存的多智能体高阶非线性系统的分布式一致性有限时间控制技术已相当成熟,但其设计过程均过于复杂且千篇一律。
技术实现思路
1、本发明的目的是提供一种多智能体磁滞系统分布式输出反馈有限时间一致控制方法,以解决上述现有技术存在的问题。
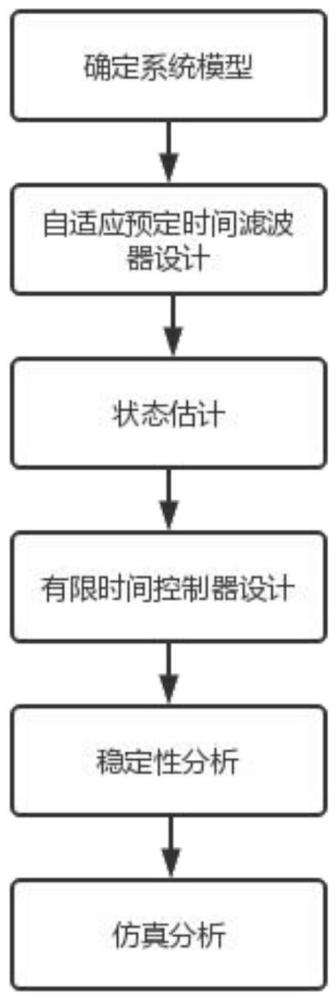
2、为实现上述目的,本发明提供了一种多智能体磁滞系统分布式输出反馈有限时间一致控制方法,包括以下步骤:
3、包括以下步骤:
4、构建同时具有未知参数、未知饱和pi磁滞输入、未知非线性项和未知状态的高阶不确定非线性多智能体系统;
5、针对所述高阶不确定非线性多智能体系统设计自适应预定时间滤波器;
6、设计动态高增益k-滤波器对所述高阶不确定非线性多智能体系统进行未知状态估计;
7、基于所述自适应预定时间滤波器设计有限时间控制器;
8、基于所述高阶不确定非线性多智能体系统、所述自适应预定时间滤波器、所述动态高增益k-滤波器、所述有限时间控制器组成闭环系统;
9、采用李雅普诺夫稳定性理论、图论知识对所述闭环系统进行稳定性分析并进行数值仿真分析。
10、可选地,所述同时具有未知参数、未知饱和pi磁滞输入、未知非线性项和未知状态的高阶不确定非线性多智能体系统如下所示:
11、
12、
13、
14、其中:ui∈r和yi∈r分别表示系统跟随者i的状态向量、输入和输出;均为已知的非线性光滑向量函数;ai,k是系统模型内的未知实常数;fi(yi)为一类已知下三角非线性光滑函数矩阵;gi(yi)表示已知光滑向量函数,且bi表示未知实数;ρi表示自适应预定时间滤波器的参数;ρi=ni-mi>1;hi[ui(t)]∈r表示系统磁滞输入。
15、可选地,所述自适应预定时间滤波器如下所示:
16、
17、其中:αi,j和分别为滤波前、后的虚拟控制率,表示滤波器的边界误差,ei,j表示si,j经转换后所获得的新误差变量,表示有限时间边界函数,表示αi,j的一阶导数的绝对值的上界,τi,j表示滤波器时间常数,γi,j,σi表示设计参数。
18、可选地,所述动态高增益k-滤波器如下所示:
19、
20、
21、其中:li为滤波器的动态增益,且表示表示动态高增益k-滤波器的状态量的导数,k表示从1到ri的整数。
22、可选地,所述有限时间控制器基于下式进行设计:
23、
24、其中:i=1,...,n,2≤m≤ρi-1,表示υi的第ρi个元素,υi,j表示υi的第j个元素,υi,m表示υi的第m个元素,表示gi的第ni-ρi个元素;表示的第1个元素;表示的第1个元素;xi,2表示xi的第2个元素;表示li的ρi次方;fi,j,m表示fi的第m行第j列元素;表示fi的第ρi行第j列元素。
25、可选地,基于所述自适应预定时间滤波器设计有限时间控制器的过程中,基于自适应预定时间滤波器的参数分别设计系统一致误差,并基于所述系统一致误差设计虚拟控制率,基于所述自适应预定时间滤波器对所述虚拟控制率进行处理,获取所述自适应预定时间滤波器的边界误差所对应的lyapunov函数,直至系统一致误差的设计数量等于自适应预定时间滤波器的参数时,基于对应的虚拟控制率设计实际控制率。
26、可选地,在第一个系统一致误差的设计过程中,分别设计自适应预定时间滤波器的参数所对应的自适应率。
27、可选地,所述自适应率的设计方法如下所示:
28、
29、
30、
31、
32、
33、
34、其中:和分别为自适应预定时间滤波器的参数pi、χi、θi和θi,q的估计,表示辅助函数,和均表示设计参数。
35、可选地,所述虚拟控制率的设计方法如下所示:
36、
37、其中(m=3,...,ρi-1、i=1,...,n),αi,m表示第m个虚拟控制率,zi,m-1表示第m-1步的跟踪误差,即qi,m表示qi的第m个元素,δi,m,1和ci,m均表示正的设计参数,表示zi,m的2β-1次方,其中β=(2n-1/2n+1)。
38、可选地,所述实际控制率的设计方法如下所示:
39、
40、其中:ui表示实际控制率,表示第ρi步的虚拟控制率。
41、本发明的技术效果为:
42、本发明解决了具有未知饱和磁滞特性的多智能体工业系统在仅输入输出可测的情况下的跟踪控制问题,同时还确保系统的瞬态性能。与现有多智能体高阶非线性系统相比,本发明不仅考虑了控制系统的稳态性能,还同时利用双曲正切函数和有限时间边界性能函数构造一种新型的预定时间滤波器,在解决传统反演法所固有的微分膨胀问题的同时,确保了自身的瞬态性能,因此对提高工业控制性能具有重要意义。此外,将分布式一致性有限时间动态面控制器的设计过程与滤波器边界误差的镇定过程分离,此策略不仅能确保闭环系统在有限时间内达到有界稳定状态,而且还能有效降低多智能体系统自适应控制器的设计负担。在理论上,本发明可推进控制领域内高阶非线性多智能体系统分布式反馈控制的研究;在实际上,本发明研究成果可以应用于实际的工程应用中以提高非线性多智能体系统的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!