基于姿态控制的高速飞行列车悬浮降落控制系统及方法与流程
本发明涉及降落控制,尤其涉及一种基于姿态控制的高速飞行列车悬浮降落控制系统及方法。
背景技术:
1、目前,对于飞机的起落架支撑系统而言,当飞机起飞爬升至一定高度(10-15m)后悬浮起落架,从而改善飞机的气动特性、减小气动阻力、提高飞行效率和速度;飞机在准备降落时(高度250-500m)放下起落架,为飞机降落提供地面滑行条件,使飞机平稳安全着陆,着陆速度一般在200-250km/h;
2、直升机的起落架系统与客机类似,有些型号采用了可收放式起落架,但是大部分型号的直升机起落架无法进行收放。直升机起降过程中由驾驶员对姿态进行控制,避免由于降落平台崎岖不平或者随机波动导致发生危险。
3、高速飞行列车也具有悬浮架,但飞机(直升机)的悬浮架控制并不适用于高速飞行列车,而现有技术中也没有关于高速飞行列车结合悬浮架(起落架)动作姿态的悬浮降落控制方法。
技术实现思路
1、本发明提供了一种基于姿态控制的高速飞行列车悬浮降落控制系统及方法,能够解决现有技术中的问题。
2、本发明提供了一种基于姿态控制的高速飞行列车悬浮降落控制系统,其中,该系统包括:
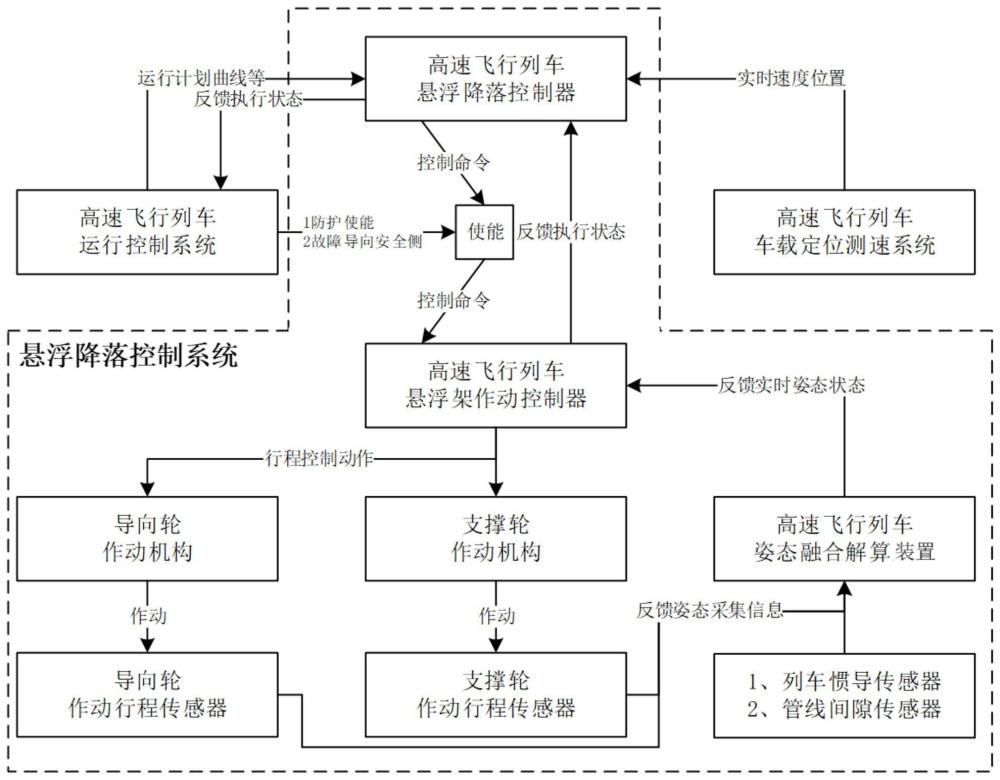
3、悬浮降落控制器,用于接收来自列车的运行控制系统的运行信息和来自车载定位测速系统的实时速度位置信息,根据运行信息和实时速度位置信息计算并输出预期悬浮位置点或预期降落位置点至运行控制系统,并根据运行状态以及预期悬浮位置点或预期降落位置点输出悬浮架控制指令;
4、姿态融合解算装置,用于接收导向轮作动行程传感器信息、支撑轮作动行程传感器信息、列车惯导传感器信息和管线间隙传感器信息,根据导向轮作动行程传感器信息、支撑轮作动行程传感器信息、列车惯导传感器信息和管线间隙传感器信息对列车姿态进行解算,并输出解算的列车姿态;
5、悬浮架作动控制器,用于接收悬浮架控制指令和解算的列车姿态,根据悬浮架控制指令控制导向轮作动机构和支撑轮作动机构执行相应的收放操作,根据解算的列车姿态控制导向轮和支撑轮的行程,并反馈执行状态至悬浮降落控制器。
6、优选地,在运行状态为列车正常悬浮且列车到达预期悬浮位置点的预定范围内的情况下,悬浮降落控制器输出指示支撑轮先收起而导向轮后收起的控制指令。
7、优选地,在运行状态为列车正常降落且列车到达预期降落位置点的预定范围内的情况下,悬浮降落控制器输出指示导向轮先放下而支撑轮后放下的控制指令。
8、优选地,在运行状态为列车降落故障且列车到达预期降落位置点的预定范围内的情况下,悬浮降落控制器输出指示支撑轮收起而导向轮放下的控制指令。
9、优选地,在导向轮未下放之前,控制支撑轮作动机构不动作,在支撑轮未收起之前,控制导向轮作动机构不动作。
10、本发明还提供了一种基于姿态控制的高速飞行列车悬浮降落控制方法,其中,该方法包括:
11、利用悬浮降落控制器接收来自列车的运行控制系统的运行信息和来自车载定位测速系统的实时速度位置信息,根据运行信息和实时速度位置信息计算并输出预期悬浮位置点或预期降落位置点至运行控制系统,并根据运行状态以及预期悬浮位置点或预期降落位置点输出悬浮架控制指令;
12、利用姿态融合解算装置接收导向轮作动行程传感器信息、支撑轮作动行程传感器信息、列车惯导传感器信息和管线间隙传感器信息,根据导向轮作动行程传感器信息、支撑轮作动行程传感器信息、列车惯导传感器信息和管线间隙传感器信息对列车姿态进行解算,并输出解算的列车姿态;
13、利用悬浮架作动控制器接收悬浮架控制指令和解算的列车姿态,根据悬浮架控制指令控制导向轮作动机构和支撑轮作动机构执行相应的收放操作,根据解算的列车姿态控制导向轮和支撑轮的行程,并反馈执行状态至悬浮降落控制器。
14、优选地,在运行状态为列车正常悬浮且列车到达预期悬浮位置点的预定范围内的情况下,输出指示支撑轮先收起而导向轮后收起的控制指令。
15、优选地,在运行状态为列车正常降落且列车到达预期降落位置点的预定范围内的情况下,输出指示导向轮先放下而支撑轮后放下的控制指令。
16、优选地,在运行状态为列车降落故障且列车到达预期降落位置点的预定范围内的情况下,输出指示支撑轮收起而导向轮放下的控制指令。
17、优选地,在导向轮未下放之前,控制支撑轮作动机构不动作,在支撑轮未收起之前,控制导向轮作动机构不动作。
18、通过上述技术方案,可以根据运行状态以及预期悬浮位置点或预期降落位置点输出悬浮架控制指令,根据悬浮架控制指令控制相应的作动机构执行相应的操作,并根据解算的列车姿态控制导向轮和支撑轮的行程。由此,能够实现在列车平稳悬浮降落以及及时按照当前的车辆姿态控制支撑轮和导向轮完成姿态纠正并安全降落的效果。
技术特征:
1.一种基于姿态控制的高速飞行列车悬浮降落控制系统,其特征在于,该系统包括:
2.根据权利要求1所述的系统,其特征在于,在运行状态为列车正常悬浮且列车到达预期悬浮位置点的预定范围内的情况下,悬浮降落控制器输出指示支撑轮先收起而导向轮后收起的控制指令。
3.根据权利要求1所述的系统,其特征在于,在运行状态为列车正常降落且列车到达预期降落位置点的预定范围内的情况下,悬浮降落控制器输出指示导向轮先放下而支撑轮后放下的控制指令。
4.根据权利要求1所述的系统,其特征在于,在运行状态为列车降落故障且列车到达预期降落位置点的预定范围内的情况下,悬浮降落控制器输出指示支撑轮收起而导向轮放下的控制指令。
5.根据权利要求1所述的系统,其特征在于,在导向轮未下放之前,控制支撑轮作动机构不动作,在支撑轮未收起之前,控制导向轮作动机构不动作。
6.一种基于姿态控制的高速飞行列车悬浮降落控制方法,其特征在于,该方法包括:
7.根据权利要求6所述的方法,其特征在于,在运行状态为列车正常悬浮且列车到达预期悬浮位置点的预定范围内的情况下,输出指示支撑轮先收起而导向轮后收起的控制指令。
8.根据权利要求6所述的方法,其特征在于,在运行状态为列车正常降落且列车到达预期降落位置点的预定范围内的情况下,输出指示导向轮先放下而支撑轮后放下的控制指令。
9.根据权利要求6所述的方法,其特征在于,在运行状态为列车降落故障且列车到达预期降落位置点的预定范围内的情况下,输出指示支撑轮收起而导向轮放下的控制指令。
10.根据权利要求6所述的方法,其特征在于,在导向轮未下放之前,控制支撑轮作动机构不动作,在支撑轮未收起之前,控制导向轮作动机构不动作。
技术总结
本发明涉及降落控制技术领域,公开了一种基于姿态控制的高速飞行列车悬浮降落控制系统及方法,该系统包括:悬浮降落控制器,用于根据运行信息和实时速度位置信息计算并输出预期悬浮位置点或预期降落位置点至运行控制系统,根据运行状态以及预期悬浮位置点或预期降落位置点输出悬浮架控制指令;姿态融合解算装置,用于根据导向轮作动行程传感器信息、支撑轮作动行程传感器信息、列车惯导传感器信息和管线间隙传感器信息对列车姿态进行解算,并输出解算的列车姿态;悬浮架作动控制器,用于根据悬浮架控制指令控制导向轮作动机构和支撑轮作动机构执行相应的收放操作,根据解算的列车姿态控制导向轮和支撑轮的行程,并反馈执行状态至悬浮降落控制器。
技术研发人员:毛凯,张艳清,李少伟,张鹏举,石贺,王松林,谭浩,靳行,查小菲,李志军,陈尘,王峥
受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!