一种变同步比圆弧插补的方法
本发明涉及运动控制,尤其涉及一种变同步比圆弧插补的方法。
背景技术:
1、运动插补方法作为运动控制系统的关键技术,直接影响着载体的轨迹精度以及运动机构的运行效率和平稳性。圆弧插补作为插补运动的基本形式之一,是实现复杂运动插补的基础,提高圆弧插补精度及效率,对提高载体轨迹精度及运动系统运行效率具有重要的理论意义和实际应用价值。依据插补计算输出类型不同,现有圆弧插补方法通常可分为脉冲增量插补和数据采样插补两类。
2、对于脉冲增量插补方法,比较有代表性的是逐点比较法和数字积分法。逐点比较法通过计算上一插补周期实际位置与目标位置间的偏差,确定当前插补周期的运动方向,虽然原理简单、易于实现,但在一个插补周期内,仅能有一个轴运动,无法实现多轴联动,使得插补误差较大;数字积分法利用了数字积分原理,通过判断积分器的溢出实现脉冲输出,一定程度上克服了逐点比较法无法实现多轴联动的问题,但在插补过程中,多轴联动和一个轴单独运动的情况都存在,插补误差仍然较大,且仍然需要考虑插补路径的象限变换,增加了该算法的实现难度。
3、对于数据采样插补方法,是根据进给速度将目标轨迹按时间分割为一系列采样周期的步长,通过计算并输出下一步长所对应的位置增量实现插补。该方法虽具有较高的插补精度,但是当步长不等于期望速度的整数倍时,会产生零头距离,当前周期产生的零头距离,又会影响下一插补周期的位置精度,造成误差累积。
4、由此可见,上述现有技术的圆弧插补方法均是将各个轴作为独立轴进行运动控制,虽然能够较好的实现圆弧插补,但轴与轴之间的运动相对独立,并未考虑各个轴运动不同步导致的插补误差,制约着圆弧插补精度的进一步提高。
技术实现思路
1、本发明的目的是提供一种变同步比圆弧插补的方法,该方法利用同步运动控制确保各个轴运动的位置、速度严格同步,通过不断调整同步比,实现高精度圆弧插补,有效降低了各个轴运动不同步导致的插补误差,具有较高的插补精度和运行效率。
2、本发明的目的是通过以下技术方案实现的:
3、一种变同步比圆弧插补的方法,所述方法包括:
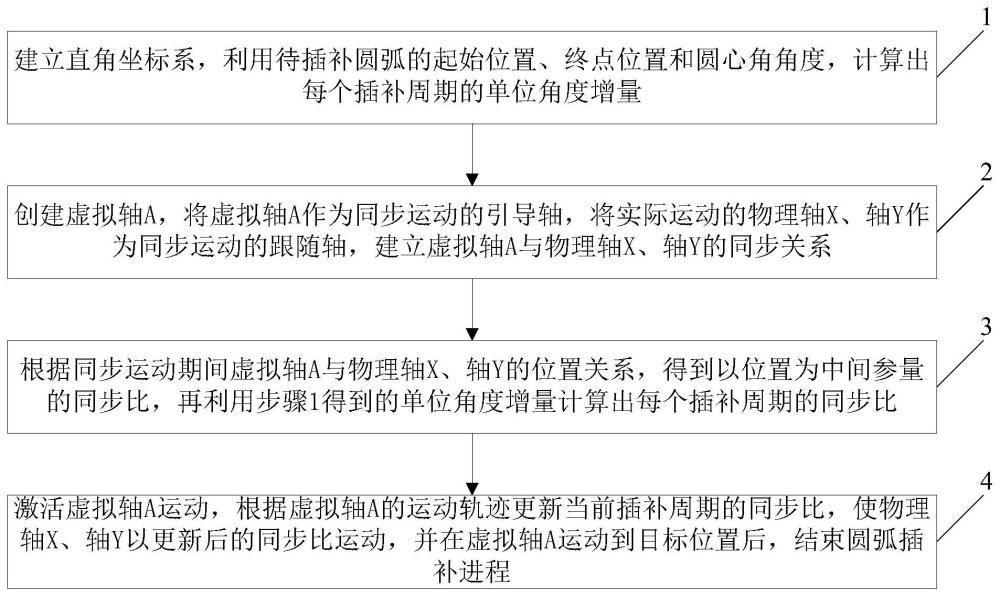
4、步骤1、建立直角坐标系,利用待插补圆弧的起始位置、终点位置和圆心角角度,计算出每个插补周期的单位角度增量;
5、步骤2、创建虚拟轴a,将虚拟轴a作为同步运动的引导轴,将实际运动的物理轴x、轴y作为同步运动的跟随轴,建立虚拟轴a与物理轴x、轴y的同步关系;
6、步骤3、根据同步运动期间虚拟轴a与物理轴x、轴y的位置关系,得到以位置为中间参量的同步比,再利用步骤1得到的单位角度增量计算出每个插补周期的同步比;
7、步骤4、激活虚拟轴a运动,根据虚拟轴a的运动轨迹更新当前插补周期的同步比,使物理轴x、轴y以更新后的同步比运动,并在虚拟轴a运动到目标位置后,结束圆弧插补进程。
8、由上述本发明提供的技术方案可以看出,上述方法利用同步运动控制确保各个轴运动的位置、速度严格同步,通过不断调整同步比,实现高精度的圆弧插补,有效减少了各个轴运动过程不同步导致的插补误差,同时在插补过程中不需要考虑复杂的象限变换,且速度变化平滑,插补效率较高。
技术特征:
1.一种变同步比圆弧插补的方法,其特征在于,所述方法包括:
2.根据权利要求1所述变同步比圆弧插补的方法,其特征在于,所述步骤1的过程具体为:
3.根据权利要求1所述变同步比圆弧插补的方法,其特征在于,所述步骤2的过程具体为:
4.根据权利要求2所述变同步比圆弧插补的方法,其特征在于,所述步骤3的过程具体为:
5.根据权利要求1所述变同步比圆弧插补的方法,其特征在于,所述步骤4的过程具体为:
技术总结
本发明公开了一种变同步比圆弧插补的方法,建立直角坐标系,利用待插补圆弧的起始位置、终点位置和圆心角角度,计算出每个插补周期的单位角度增量;创建虚拟轴A,将虚拟轴A作为同步运动的引导轴,将实际运动的物理轴X、轴Y作为同步运动的跟随轴;根据同步运动期间虚拟轴A与物理轴X、轴Y的位置关系,利用单位角度增量计算出每个插补周期的同步比;激活虚拟轴A运动,根据虚拟轴A的运动轨迹更新当前插补周期的同步比,使物理轴X、轴Y以更新后的同步比运动,并在虚拟轴A运动到目标位置后,结束圆弧插补。该方法利用同步运动控制确保各个轴运动的位置、速度严格同步,通过不断调整同步比,实现高精度圆弧插补。
技术研发人员:魏青轩,王世民,李雪婷,白欣悦,李程程,程金来
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!