一种超精密运动台垂向静态解耦与前馈联合迭代校正方法
本发明属于超精密运动控制领域,涉及一种超精密运动台垂向三自由度静态解耦与前馈联合迭代校正方法。
背景技术:
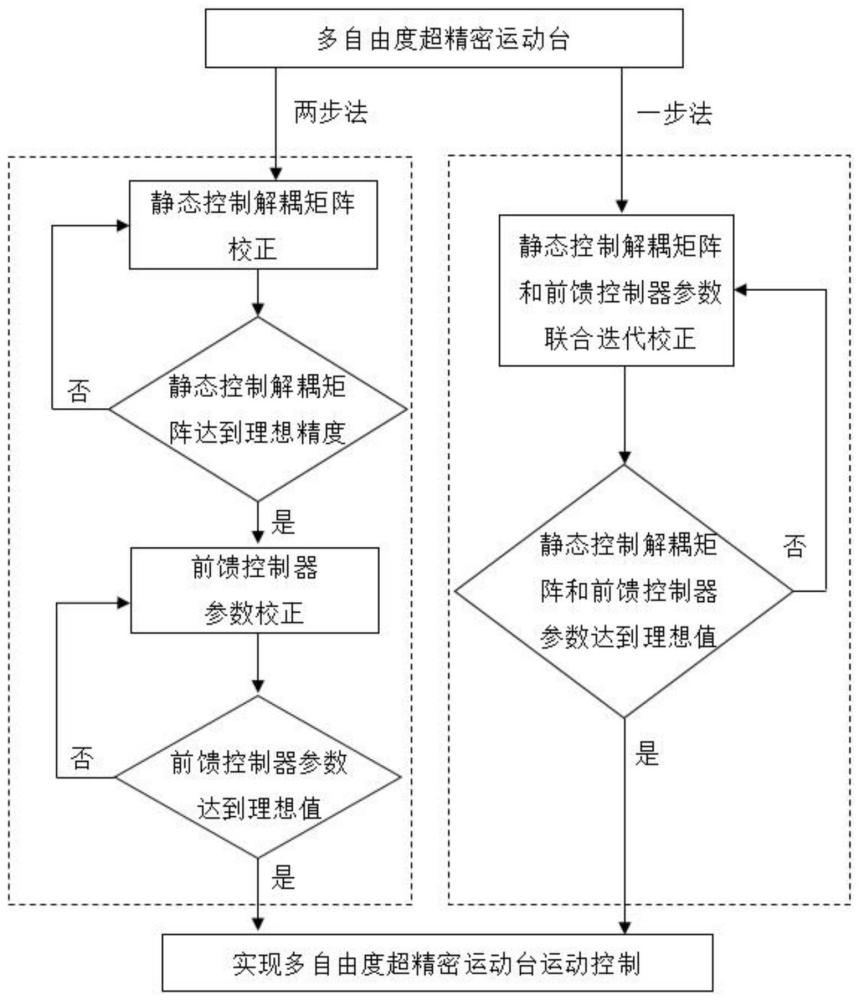
1、多自由度超精密运动台是高端半导体制造或测试设备的关键部件,其控制主要包括解耦、反馈控制和前馈控制三个基本步骤。解耦的基本目的是根据运动台的执行器布局建立静态控制解耦矩阵,实现从逻辑轴控制力或力矩到物理轴电机出力的转换。在此基础上,可对运动台各自由度分别进行反馈和前馈控制设计。反馈控制的目的是使各自由度的闭环控制系统稳定,前馈控制主要用于补偿跟踪参考轨迹引起的伺服误差。其中,解耦与前馈控制性能严重依赖模型信息的准确性。然而,实际中不可避免地存在加工误差、装配误差以及被控对象的建模误差,使得所设计的静态控制解耦矩阵与前馈控制器不准确,最终严重影响运动控制性能。为了解决上述问题,需要对静态控制解耦矩阵和前馈控制器进行校正。现有的解决方案是一种两步法,即先对静态控制解耦矩阵进行校正,在此基础上再对前馈控制器进行校正。这种两步法过程较为繁琐,无法满足多自由度超精密运动台控制系统的快速校正需求。
技术实现思路
1、本发明的目的是为了解决目前对静态控制解耦矩阵和前馈控制器进行两步校正的过程较为繁琐,无法满足多自由度超精密运动台控制系统的快速校正需求的问题,提供一种超精密运动台垂向三自由度静态控制解耦矩阵与前馈控制器的联合校正方法。该方法可通过一次校正过程同时完成静态控制解耦矩阵与前馈控制器的校正,简化了多自由度运动台控制系统的校正过程,提升了控制系统校正的效率,具有重要的工程应用价值。
2、为实现上述目的,本发明采取的技术方案如下:
3、一种超精密运动台垂向静态解耦与前馈联合迭代校正方法,所述三自由度分别为z-垂向平动运动自由度,rx-绕x轴的旋转运动自由度,ry-绕y轴的旋转运动自由度;所述方法的校正对象是静态控制解耦矩阵和加速度前馈控制器参数;
4、前馈控制信号由前馈控制器和参考运动轨表示为:
5、
6、式中,i=0,1,…,w-1,w为正整数,i代表实验次数;s为连续时间信号的拉普拉斯变换算子;
7、式中,为z自由度在第i次实验的前馈控制信号,为rx自由度在第i次实验的前馈控制信号,为ry自由度在第i次实验的前馈控制信号;为z自由度在第i次实验的前馈控制器传递函数,为rx自由度在第i次实验的前馈控制器传递函数,为ry自由度在第i次实验的前馈控制器传递函数;rz(s)为z自由度的运动参考轨迹,rθx(s)为rx自由度的运动参考轨迹,rθy(s)为ry自由度的运动参考轨迹;
8、前馈控制器为加速度前馈控制器,形式为:
9、
10、式中,为第i次实验构造的z自由度前馈控制器参数,为第i次实验构造的rx自由度前馈控制器参数,为第i次实验构造的ry自由度前馈控制器参数;
11、对于第i次实验,利用反馈控制器输出信号对前馈控制器参数进行迭代估计,其迭代更新的形式如下:
12、
13、
14、
15、式中,为j次迭代后的估计值,为j次迭代后的估计值,为j次迭代后的估计值;为j-1次迭代后的估计值,为j-1次迭代后的估计值,为j-1次迭代后的估计值;为z自由度在第i次实验的反馈控制信号的提升向量,为rx自由度在第i次实验的反馈控制信号的提升向量,为ry自由度在第i次实验的反馈控制信号的提升向量;为反馈控制信号在t=kts时刻的采样值,k=0,1,...,n-1,n为正整数,t为连续时间变量,ts为控制系统的采样周期;相似地,为反馈控制信号在t=kts时刻的采样值;为反馈控制信号在t=kts时刻的采样值;
16、式中,j=0,1,…,m-1,m为正整数,j代表第i次实验中前馈控制器参数的迭代次数;
17、式中,和形式如下:
18、
19、式中,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值;
20、对于第i次实验,给定初值设定m-1的值,从j=0逐渐迭代到j=m-1,可得到令
21、已知m×n维的初始静态控制解耦矩阵h0,m为执行器数量,n为运动自由度;对于通过三个执行器控制垂向三自由度的运动台,m=n=3;
22、加工及装配误差所导致的各执行器力臂误差严重影响静态控制解耦矩阵的准确度;对于超精密运动台垂向三自由度,力臂误差导致的耦合效应是z自由度运动不受其他自由度的影响,z自由度的运动对rx和ry自由度有很大的影响,且rx和ry自由度之间也相互影响;为减小耦合效应,需要对静态控制解耦矩阵进行校正,其迭代校正形式为:
23、
24、对于第i次实验,hi为第i次实验的静态控制解耦矩阵;
25、式中,为6个校正参数,校正参数利用最小二乘方法进行计算,计算方法为:
26、
27、
28、式中,φi和ψi形式如下:
29、
30、
31、和的形式如下:
32、
33、式中,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值;为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值;
34、设定前馈控制器参数初值和静态控制解耦矩阵初值h0,设定w-1值,从i=0逐渐迭代到i=w-1,得到校正的静态控制解耦矩阵hw-1和垂向三自由度前馈控制器参数
35、本发明相对于现有技术的有益效果为:与先对静态控制解耦矩阵进行校正,再对前馈控制器进行校正的两步法相比,本发明公开的超精密运动台垂向三自由度静态解耦与前馈联合迭代校正方法可以通过一次校正过程同时完成解耦与前馈的校正,提升了超精密运动控制系统校正的效率。
技术特征:
1.一种超精密运动台垂向静态解耦与前馈联合迭代校正方法,其特征在于:所述方法的校正对象是静态控制解耦矩阵和加速度前馈控制器参数;
2.根据权利要求1所述的一种超精密运动台垂向静态解耦与前馈联合迭代校正方法,其特征在于:是的提升形式,是的提升形式,是的提升形式,和的具体形式如下:
3.根据权利要求1所述的一种超精密运动台垂向静态解耦与前馈联合迭代校正方法,其特征在于:φi是φi(s)的提升形式,ψi是ψi(s)的提升形式,是的提升形式,是的提升形式,φi(s),ψi(s),的具体形式如下:
技术总结
一种超精密运动台垂向静态解耦与前馈联合迭代校正方法,属于超精密运动控制领域。该方法可通过一次校正过程同时完成静态控制解耦矩阵与前馈控制器的校正,简化了多自由度运动台控制系统的校正过程,提升了控制系统校正的效率,具有重要的工程应用价值。与先对静态控制解耦矩阵进行校正,再对前馈控制器进行校正的两步法相比,本发明公开的超精密运动台垂向三自由度静态解耦与前馈联合迭代校正方法可以通过一次校正过程同时完成解耦与前馈的校正,提升了超精密运动控制系统校正的效率。
技术研发人员:李理,赵洪阳,董岳,崔宁
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!