用于外骨骼机器人的基于EtherCAT总线的多模数据实时采集系统的制作方法
本发明属于多模数据实时采集系统,具体涉及一种用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统。
背景技术:
1、在外骨骼机器人中,安装有大量的传感器,例如姿态传感器、压力传感器、位移传感器等,用来实时监测系统的运动状态。这些传感器的输出数据需要与主控系统进行实时的数据交换和传输,当传感器的数量较多时,对主控系统的运算处理能力有更高的要求,增加了系统的成本;同时,各个传感器的电缆需要分别接入主控电路板中,造成系统连线较为复杂,增加了系统工作的不可靠性。目前市场上的数据采集系统大多由国外厂商供货,价格较高、维护成本较大。因此,在外骨骼机器人领域,需要接入大量的传感器来判断系统的状态。然而,由于外骨骼机器人是一个高度集成化的系统,对其数据输入采集系统的体积重量和功耗提出了很高的要求,目前的常规设计难以满足需要。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:针对外骨骼机器人控制系统领域中,需要采用总线网络将传感器输出数据信号与中央控制器进行数据交换的需要,如何提供一种具有电路简单、使用范围广泛、成本低、可靠性高等优点的用于外骨骼机器人的基于ethercat总线网络的多模数据实时采集系统。
3、(二)技术方案
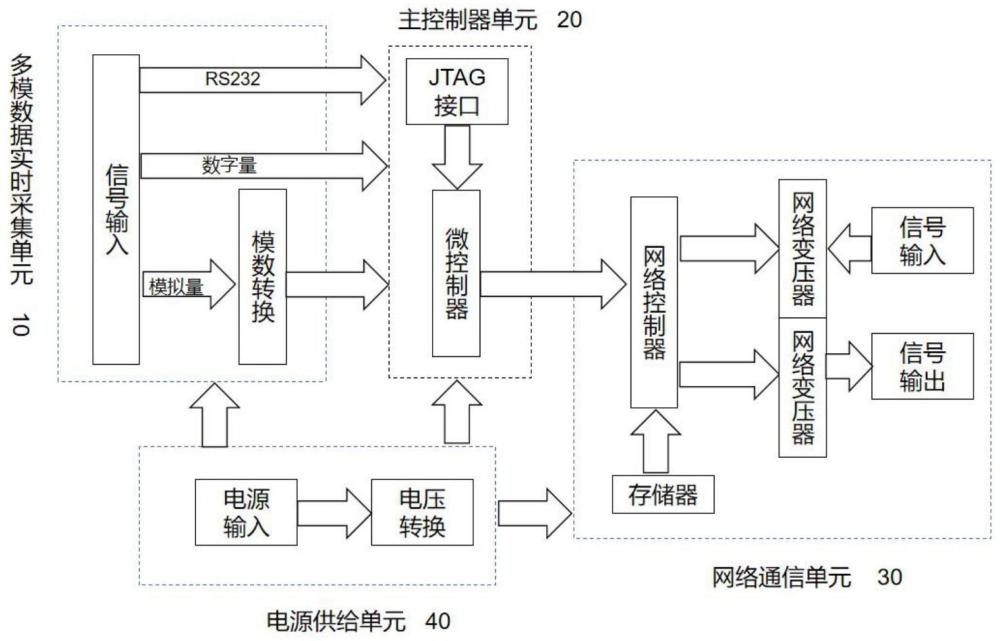
4、为了解决上述技术问题,本发明提供一种用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,所述系统包括:多模数据实时采集单元(10)、主控制器单元(20)、网络通信单元(30)和电源供给单元(40);其中,
5、所述多模数据实时采集单元(10),用于采集多模数据信号,包括16路±10v的模拟信号、16路di/o数据信号以及4路rs232接口数据信号;
6、所述主控制器单元(20),与所述多模数据实时采集单元(10)通过16位并行总线进行数据传输;并将多模数据信号通过spi接口传输给所述网络通信单元(30);
7、所述网络通信单元(30),将所述多模数据信号转化为ethercat总线数据信号,并与ethercat总线网络上的主站或网络控制器进行数据交换;
8、所述电源供给单元(40),用来提供所述多模数据实时采集系统的电源。
9、其中,所述多模数据实时采集单元(10)包括第一接插件xs1、第五接插件xs5、第六接插件xs6和模数转换芯片u1;所述第一接插件xs1连接所要采集的16路±10v的数据信号;所述模数转换芯片u1用来将所采集的模拟信号转换为数字信号,同时通过16位数据总线与所述主控制器单元(20)进行数据传输;所述第五接插件xs5连接所要采集的16路di/o数据信号,同时通过与所述主控制器单元(20)的数字io口进行数据传输;所述第六接插件xs6连接所要采集的4路rs232接口数据信号,同时通过与所述主控制器单元(20)的串口进行数据传输。
10、其中,所述第一接插件xs1共有32个引脚,奇数引脚连接所采集的16路±10v输入的数据信号,偶数引脚都与gnd连接;第五接插件xs5共有16个引脚,连接所采集的16路di/o数据信号;第六接插件xs6共有12个引脚,1、2、7与8引脚分别连接所采集的4路rs232接口数据输入信号,3、4、9与10引脚分别连接所采集的4路rs232接口数据输出信号,5、6、11与12引脚都与gnd连接。
11、其中,所述主控制器单元(20)包括微控制器u2;所述微控制器u2通过16位数据总线与所述多模数据实时采集单元(10)进行连接、与所述网络通信单元(30)通过spi接口进行连接。
12、其中,所述主控制器单元(20)还包括配置接口j1,所述配置接口j1用来给微控制器u2烧写程序。
13、其中,所述网络通信单元(30)包括网络控制器u3,所述网络控制器u3用来将从所述主控制器单元(20)接收的多模数据信号,转换为ethercat总线信号。
14、其中,所述网络通信单元(30)还包括存储器芯片u4、网络变压器芯片u5和u6,所述存储器芯片u4用来存储网络控制器u3的配置信息,所述网络变压器芯片u5和u6用来接收网络控制器u3所转换的ethercat总线信号并与网络中的主站/从站进行数据交换,进而扩展通信能力。
15、其中,所述网络通信单元(30)还包括第二接插件xs2和第三接插件xs3,所述第二接插件xs2是ethercat总线的输入接口;所述第三接插件xs3是ethercat总线的输出接口,用于网络信号的输出与传递。
16、其中,所述电源供给单元(40)包括电源芯片u7和电源芯片u8,所述电源芯片u7将输入的6v~26v电源转换为+5v;所述电源芯片u8将+5v电压转换为+3.3v。
17、其中,所述电源供给单元(40)还包括第四接插件xs4,所述第四接插件xs4连接外部输入的6v~26v电源。
18、(三)有益效果
19、与现有技术相比较,本发明针对外骨骼机器人控制领域中采用总线网络将传感器输出的多模信号与中央控制器进行数据交换的需要,设计了一种由多模数据实时采集单元、主控制器单元、网络通信单元、电源供给单元组成的多模数据实时采集系统,具有以下显著优点:
20、(1)本发明电路简单、使用元器件少、占用空间小,与以往的采集系统相比,有效减少了对于控制系统的占用空间。
21、(2)采用ethercat总线网络,其数据传输速率高、性能可靠稳定,可以在各种自动化生产线、机器人控制以及需要进行实时总线网络数据传输的环境下进行大规模的系统级联。
22、(3)本发明可以采集16路±10v输出的模拟量信号、16路di/o数据信号以及4路rs232接口数据信号,减少了采集系统搭建的数量。所设计的控制器采用的元器件成本较低,系统的成本相对于现有产品大幅降低,可以有效降低整个系统的成本。
技术特征:
1.一种用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述系统包括:多模数据实时采集单元(10)、主控制器单元(20)、网络通信单元(30)和电源供给单元(40);其中,
2.如权利要求1所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述多模数据实时采集单元(10)包括第一接插件xs1、第五接插件xs5、第六接插件xs6和模数转换芯片u1;所述第一接插件xs1连接所要采集的16路±10v的数据信号;所述模数转换芯片u1用来将所采集的模拟信号转换为数字信号,同时通过16位数据总线与所述主控制器单元(20)进行数据传输;所述第五接插件xs5连接所要采集的16路di/o数据信号,同时通过与所述主控制器单元(20)的数字io口进行数据传输;所述第六接插件xs6连接所要采集的4路rs232接口数据信号,同时通过与所述主控制器单元(20)的串口进行数据传输。
3.如权利要求2所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述第一接插件xs1共有32个引脚,奇数引脚连接所采集的16路±10v输入的数据信号,偶数引脚都与gnd连接;第五接插件xs5共有16个引脚,连接所采集的16路di/o数据信号;第六接插件xs6共有12个引脚,1、2、7与8引脚分别连接所采集的4路rs232接口数据输入信号,3、4、9与10引脚分别连接所采集的4路rs232接口数据输出信号,5、6、11与12引脚都与gnd连接。
4.如权利要求3所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述主控制器单元(20)包括微控制器u2;所述微控制器u2通过16位数据总线与所述多模数据实时采集单元(10)进行连接、与所述网络通信单元(30)通过spi接口进行连接。
5.如权利要求4所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述主控制器单元(20)还包括配置接口j1,所述配置接口j1用来给微控制器u2烧写程序。
6.如权利要求5所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述网络通信单元(30)包括网络控制器u3,所述网络控制器u3用来将从所述主控制器单元(20)接收的多模数据信号,转换为ethercat总线信号。
7.如权利要求6所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述网络通信单元(30)还包括存储器芯片u4、网络变压器芯片u5和u6,所述存储器芯片u4用来存储网络控制器u3的配置信息,所述网络变压器芯片u5和u6用来接收网络控制器u3所转换的ethercat总线信号并与网络中的主站/从站进行数据交换,进而扩展通信能力。
8.如权利要求7所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述网络通信单元(30)还包括第二接插件xs2和第三接插件xs3,所述第二接插件xs2是ethercat总线的输入接口;所述第三接插件xs3是ethercat总线的输出接口,用于网络信号的输出与传递。
9.如权利要求8所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述电源供给单元(40)包括电源芯片u7和电源芯片u8,所述电源芯片u7将输入的6v~26v电源转换为+5v;所述电源芯片u8将+5v电压转换为+3.3v。
10.如权利要求9所述的用于外骨骼机器人的基于ethercat总线的多模数据实时采集系统,其特征在于,所述电源供给单元(40)还包括第四接插件xs4,所述第四接插件xs4连接外部输入的6v~26v电源。
技术总结
本发明属于多模数据实时采集系统技术领域,具体涉及一种用于外骨骼机器人的基于EtherCAT总线的多模数据实时采集系统,包括:多模数据实时采集单元、主控制器单元、网络通信单元)和电源供给单元;其中,多模数据实时采集单元用来采集多模数据信号,包括16路±10V的模拟信号、16路DI/O数据信号以及4路RS232接口数据信号;主控制器单元将多模数据信号传输给网络通信单元;网络通信单元将所述多模数据信号转化为EtherCAT总线数据信号,并与EtherCAT总线网络上的主站或网络控制器进行数据交换,具备拓展通信的能力。本发明的多模数据实时采集系统,具有电路简单、使用范围广泛、成本低、可靠性高等优点。
技术研发人员:刘浩,赵浩,莫新民,纪平鑫,宋鹏,李睿远,孙汐畅,李强,韦组拔,冯博林,张文豪,李瀚哲
受保护的技术使用者:西北机电工程研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!