一种采用分布式事件触发控制的有限时间协同控制方法
本发明属于多智能体协同控制领域,具体涉及一种采用分布式事件触发控制的有限时间协同控制方法。
背景技术:
1、在现实世界中许多问题非常复杂,难以通过单一智能体来解决,由此引入了多智能体系统(mass),用以解决交通管理、电网分配等复杂问题;同时多智能体系统在自动化领域中的无人机编队控制、汽车的自动驾驶控制等方面也发挥着关键作用。近些年来,对多智能体系统协同控制的研究受到极大关注,其中一致性控制是多智能体系统协同控制最基本也是最核心的问题。针对一致性控制问题,众多学者提出了例如有限时间控制、滑膜控制、自适应控制等控制方法,这些控制方法满足了各种控制目标或性能要求。
2、工业控制领域所应用的多智能体系统一般会在每个智能体内部嵌入一个控制器,并采用电源进行供电。在此基础下,传统的连续控制方法会消耗大量的资源,此外多智能体系统内频繁进行信息传递会占用有限的带宽,进而使多智能体系统的性能受到验证影响,甚至导致多智能体系统崩溃。而非连续控制方法恰好可以减少资源消耗且减少占用通信带宽,因为非连续控制方法只在需要时触发,而不是以连续的方式执行。例如事件触发,与连续控制方法不同,事件触发控制方法不按照固定的时间间隔执行控制操作,控制操作只在触发条件满足时才被触发执行。这可以显著减少控制操作的频率,降低资源消耗。
3、在多智能体系统分布式控制中,每个智能体都能够与其邻居智能体相互通信、协调行动,以实现共同的控制目标。这种控制方式将整个系统的计算和通信压力分摊到各个智能体上,因此当某个智能体发生故障时,多智能体系统仍能通过其它智能体之间的相互协作来完成控制任务,这种控制方法既提高了多智能体系统的协调性,又具有鲁棒性好、灵活性强、易于扩展等优点。因此,为了解决上述问题,我们需要考虑采用分布式控制,这种控制方式具有更好的灵活性和抗干扰能力,且易于后续对系统进行更新扩展。
4、同时,考虑到非线性多智能体系统能够更好地模拟现实世界的复杂系统,且能够更好地处理各种非线性动态和相互作用。因此,本发明针对的也是非线性的多智能体系统,该系统具有更强的鲁棒性,能有效应对系统参数变化、外部扰动以及不确定性,从而增加了系统的可靠性。最后,大多数一致性控制实现的是渐进收敛,即只能够保证智能体能够在无穷时间内实现一致性,这并不能够满足现实中的需求,而本文所提出的控制,可以实现在有限时间内实现一致性,由于有限时间一致性规定了一个时间期限,在该时间期限内,智能体系统需要达到一致,进而能够节省系统资源并提高效率。
5、基于上述讨论,考虑到连续控制下智能体间控制和通信会增加通信负担、在实际控制系统中,需要在有限时间内实现一致性,以及大多数控制任务都是基于非连续系统,针对非线性多智能体的有限时间一致性问题,本文旨在设计一种分布式事件触发控制策略,来实现非线性多智能体系统的有限时间一致性。
技术实现思路
1、为解决上述问题,本发明提供了一种采用分布式事件触发控制的有限时间协同控制方法,其特征在于,包括以下步骤:
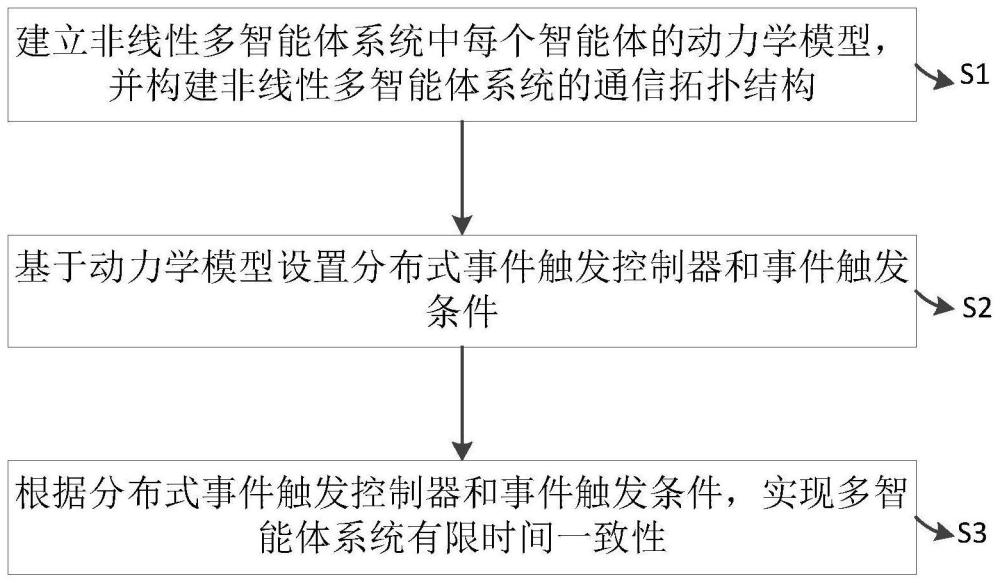
2、s1.建立非线性多智能体系统中每个智能体的动力学模型,并构建非线性多智能体系统的通信拓扑结构;
3、s2.基于动力学模型设置分布式事件触发控制器和事件触发条件;
4、s3.根据分布式事件触发控制器和事件触发条件,实现多智能体系统有限时间一致性。
5、进一步的,步骤s1包括:
6、s11.非线性多智能体系统包括n个智能体,令每个智能体代表一个节点,其通信拓扑结构采用带权重的无向图g=(v,ε,a)表示;其中,v表示节点集,ε表示边集,邻接矩阵a=(aij)n×n表示非线性多智能体系统的联通关系,aij表示邻接矩阵第i行第j列的元素值,若节点vi与节点vj间存在边属于边集,即(vi,vj)∈ε,则aij>0,否则aij=0;根据无向图g确定度矩阵d和拉普拉斯矩阵l,其中d=diag{d1,d2,…,dn},l=d-a;
7、s12.非线性多智能体系统中每个智能体的动力学模型为:
8、
9、其中,xi(t)表示第i个智能体在t时刻的状态信息,ui(t)表示第i个智能体在t时刻的控制输入,f(,)表示非线性方程。
10、进一步的,步骤s2基于动力学模型设置分布式事件触发控制器为:
11、s21.基于多智能体系统状态信息xi(t)设计联合状态函数qi(t),表示为:
12、
13、其中,ni表示第i个智能体的邻居智能体数量,若第i个智能体与第j个智能体间可通讯,则aij=1,否则aij=0;
14、s22.根据联合状态函数qi(t)定义事件触发测量误差ei(t),表示为:
15、
16、其中,表示第i个智能体在第k个事件触发时刻被触发,α、β表示误差系数;
17、s23.根据联合状态函数qi(t)设计分布式事件触发控制器ui(t),表示为:
18、
19、其中,γi表示第i个智能体的增益参数。
20、进一步的,事件触发条件表示为:
21、
22、其中,fi(t,ei(t),qi(t))为第i个智能体在t时刻的触发函数值。
23、进一步的,步骤s3非线性多智能体系统中每个智能体根据分布式事件触发控制器和事件触发条件进行信息传输,包括:
24、s31.计算第i=1,2,…,n个智能体在t时刻的触发函数值fi;
25、s32.若该触发函数值fi>0,则第i个智能体满足事件触发条件,采用非连续事件触发控制协议对第i个智能体进行状态更新;
26、s33.若该触发函数值fi≤0,则第i个智能体不满足事件触发条件,不对第i个智能体进行状态更新。
27、进一步的,第i个智能体在t时刻的触发函数值的计算公式为:
28、
29、其中,fi(t,ei(t),qi(t))表示第i个智能体在t时刻的触发函数值,qi(t)表示第i个智能体在t时刻的联合状态函数值,ei(t)表示第i个智能体在t时刻的事件触发测量误差,εi表示第i个智能体的增益参数,n表示智能体总数,α、β表示误差系数。
30、进一步的,有限时间τ设定为:
31、
32、
33、
34、γ=min{γi,i=1,2,…,n}
35、其中,α表示误差系数,x(0)表示智能体初始位置,u表示李亚普诺夫函数(controllyapunov function,clf)方程,γ、εi、γi表示增益,λ2表示拉普拉斯矩阵的第二个最小特征值,n表示智能体数量。
36、本发明的有益效果:
37、本发明提出了一种分布式事件触发控制协议,用于实现一阶非线性多智能体系统的有限时间一致性协同,可以解决多智能体系统在有限时间内实现一致性。所提出的分布式事件触发条件能够有效减轻系统的通信负担。且实现的是有限时间一致性,可在有限时间内实现收敛,也能够减少系统资源的使用。最后针对的是非线性的多智能体系统,能够增加系统的鲁棒性,更好地应对复杂的系统环境。
- 还没有人留言评论。精彩留言会获得点赞!