扫地机及其分区清扫的规划方法、装置及存储介质与流程
本技术涉及扫地机领域,尤其涉及一种扫地机及其分区清扫的规划方法、装置及存储介质。
背景技术:
1、在扫地机执行清扫任务时,为了能够方便管理和使用,或者为了防止交叉污染,减少清洗次数,扫地机会对待清扫场景进行分区。通过设定分区的边界,使得扫地机可以根据分区进行清扫的路径规划。
2、然而,在扫地机使用过程中,扫地机可能会存在位置变动的情况。比如,在扫地机的工作过程中,扫地机被暂停后搬放到其它位置继续进行清扫。当扫地机处于新的位置时,扫地机通常不能有效的基于新位置进行有效的路径规划,不利于提高扫地机的用户使用体验。
技术实现思路
1、有鉴于此,本技术实施例提供了一种扫地机及其分区清扫的规划方法、装置及存储介质,以解决现有技术中当扫地机处于新的位置时,扫地机通常不能有效的基于新位置进行有效的路径规划,不利于提高扫地机的用户使用体验的问题。
2、本技术实施例的第一方面提供了一种扫地机的分区清扫的规划方法,所述方法包括:
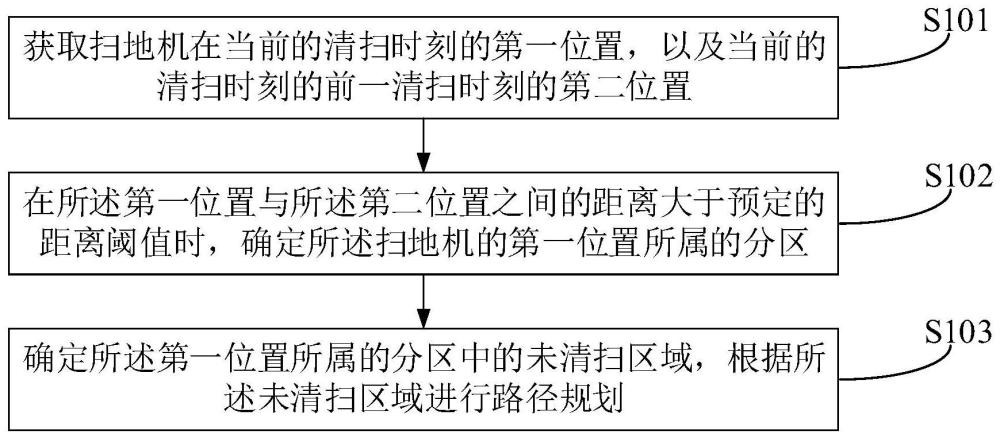
3、获取扫地机在当前的清扫时刻的第一位置,以及当前的清扫时刻的前一清扫时刻的第二位置;
4、在所述第一位置与所述第二位置之间的距离大于预定的距离阈值时,确定所述扫地机的第一位置所属的分区;
5、确定所述第一位置所属的分区中的未清扫区域,根据所述未清扫区域进行路径规划。
6、结合第一方面,在第一方面的第一种可能实现方式中,确定所述扫地机所属的分区中的未清扫区域,包括:
7、获取所述第一位置所属的分区中的已清扫记录中的清扫路径;
8、按照预定的膨胀半径,对所述清扫路径进行膨胀处理,得到所述分区中的已清扫区域,根据所述已清扫区域确定所述分区中的未清扫区域。
9、结合第一方面的第一种可能实现方式,在第一方面的第二种可能实现方式中,根据所述未清扫区域进行路径规划,包括:
10、确定所述分区中的未清扫区域中的未隔离区域和隔离区域,所述隔离区域为已清扫区域所包围的区域,所述未隔离区域为未被所述已清扫区域包围的区域;
11、在所述未隔离区域清扫第一清扫路径,在所述隔离区域规划第二清扫路径;
12、根据所述第一清扫路径和所述第二清扫路径对未清扫区域进行路径规划。
13、结合第一方面的第二种可能实现方式,在第一方面的第三种可能实现方式中,在根据所述第一清扫路径和所述第二清扫路径对未清扫区域进行路径规划之后,所述方法还包括:
14、确定所述第一清扫路径的末端的第三位置,以及所述第二清扫路径的末端的第四位置;
15、根据所述第三位置与未清扫分区的距离,以及所述第四位置与所述未清扫分区的距离,确定所述第一清扫路径和所述第二清扫路径的清扫顺序。
16、结合第一方面,在第一方面的第四种可能实现方式中,获取扫地机在当前的清扫时刻的第一位置,以及当前的清扫时刻的前一清扫时刻的第二位置,包括:
17、检测到扫地机当前处于对地面的清扫状态时,则确定当前时刻为当前的清扫时刻,确定所述扫地机的当前位置为所述第一位置;
18、获取在所述当前时刻之前检测到所述扫地机处于对地面的清扫状态时的最近时刻,确定所述扫地机在所述最近时刻的位置为所述第二位置。
19、结合第一方面,在第一方面的第五种可能实现方式中,根据所述未清扫区域进行路径规划,包括:
20、根据所述未清扫区域规划闭合路径;
21、对所述闭合路径所确定的闭合区域进行路径规划。
22、结合第一方面的第五种可能实现方式,在第一方面的第六种可能实现方式中,根据所述未清扫区域规划闭合路径,包括:
23、在所述闭合路径的规划过程中,如果所述规划点在分区边界处,且所述规划点处的分区外为待清扫区域,且所述待清扫区域未存在分区时,则根据分区尺寸和待清扫区域扩展新的分区。
24、本技术实施例的第二方面提供了一种扫地机的分区清扫的规划装置,所述装置包括:
25、位置获取单元,用于获取扫地机在当前的清扫时刻的第一位置,以及当前的清扫时刻的前一清扫时刻的第二位置;
26、分区确定单元,用于在所述第一位置与所述第二位置之间的距离大于预定的距离阈值时,确定所述扫地机的第一位置所属的分区;
27、路径规划单元,用于确定所述第一位置所属的分区中的未清扫区域,根据所述未清扫区域进行路径规划。
28、结合第二方面,在第二方面的第一种可能实现方式中,所述路径规划单元,包括:
29、已清扫路径确定子单元,用于获取所述第一位置所属的分区中的已清扫记录中的清扫路径;
30、未清扫区域确定子单元,用于按照预定的膨胀半径,对所述清扫路径进行膨胀处理,得到所述分区中的已清扫区域,根据所述已清扫区域确定所述分区中的未清扫区域。
31、结合第二方面的第一种可能实现方式,在第二方面的第二种可能实现方式中,所述路径规划单元包括:
32、区域确定子单元,用于确定所述分区中的未清扫区域中的未隔离区域和隔离区域,所述隔离区域为已清扫区域所包围的区域,所述未隔离区域为未被所述已清扫区域包围的区域;
33、隔离区域路径规划子单元,用于在所述未隔离区域清扫第一清扫路径,在所述隔离区域规划第二清扫路径;
34、未清扫区域路径规划子单元,用于根据所述第一清扫路径和所述第二清扫路径对未清扫区域进行路径规划。
35、结合第二方面的第二种可能实现方式,在第二方面的第三种可能实现方式中,所述装置还包括:
36、位置确定单元,用于确定所述第一清扫路径的末端的第三位置,以及所述第二清扫路径的末端的第四位置;
37、清扫顺序确定单元,用于根据所述第三位置与未清扫分区的距离,以及所述第四位置与所述未清扫分区的距离,确定所述第一清扫路径和所述第二清扫路径的清扫顺序。
38、结合第二方面,在第二方面的第四种可能实现方式中,所述位置获取单元包括:
39、第一位置确定子单元,用于检测到扫地机当前处于对地面的清扫状态时,则确定当前时刻为当前的清扫时刻,确定所述扫地机的当前位置为所述第一位置;
40、第二位置确定子单元,用于获取在所述当前时刻之前检测到所述扫地机处于对地面的清扫状态时的最近时刻,确定所述扫地机在所述最近时刻的位置为所述第二位置。
41、结合第二方面,在第二方面的第五种可能实现方式中,所述路径规划单元包括:
42、闭合路径规划子单元,用于根据所述未清扫区域规划闭合路径;
43、区域路径规划子单元,用于对所述闭合路径所确定的闭合区域进行路径规划。
44、结合第二方面的第五种可能实现方式,在第二方面的第六种可能实现方式中,闭合路径规划子单元用于在所述闭合路径的规划过程中,如果所述规划点在分区边界处,且所述规划点处的分区外为待清扫区域,且所述待清扫区域未存在分区时,则根据分区尺寸和待清扫区域扩展新的分区。
45、本技术实施例的第三方面提供了扫地机,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述方法的步骤。
46、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述方法的步骤。
47、本技术实施例与现有技术相比存在的有益效果是:本技术实施例通过检测当前的清扫时刻,确定扫地机在当前的清扫时刻所在的第一位置,并检测在当前的清扫时刻的前一清扫时刻的第二位置,在第一位置与第二位置之间的距离大于预定的距离阈值时,确定第一位置所属的分区,确定第一位置所属分区中的未清扫区域,根据未清扫区域进行路径规划,从而使得机器人可以有效的适应位置变动的路径规划和清扫,有利于提升用户的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!