一种挖掘机铲斗作业运动规划分析方法与流程
本发明属于挖掘机自动控制,涉及到一种挖掘机铲斗作业运动规划分析方法。
背景技术:
1、挖掘机在土方工程、矿山开采等工程中具有不可或缺的地位,其作业效果长期依赖于操作员的经验和纯熟技能。但随着自动化科技的飞速发展,具备自主决策和智能化作业能力的挖掘机——自动化或无人挖掘机——已经成为了当前研究的焦点。这种新型挖掘机的研究中,针对铲斗作业运动轨迹的规划策略尤为关键,具体涉及作业前的行进运动路径规划,如规避障碍物、选择最佳挖掘点,作业中的实际挖掘运动路径规划,以及作业后的物料卸载路径规划。
2、尽管相关技术领域已经取得了一定的进展,但细致分析后发现,现有技术的研究重点主要集中在作业前的行进运动路径规划和作业后的物料卸载路径规划上,对于作业中实际挖掘运动路径规划的探索相对较少或分析层面浅显,缺乏挖掘机作业切入角度、挖掘力度以及收斗回挖的细致规划,使得挖掘机刚性作业无法应对不同作业场景,不仅影响挖掘效率和挖掘效果,还可能会使得挖掘机在挖掘过程中浪费能量,或者对自身造成不必要的磨损。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种挖掘机铲斗作业运动规划分析方法。
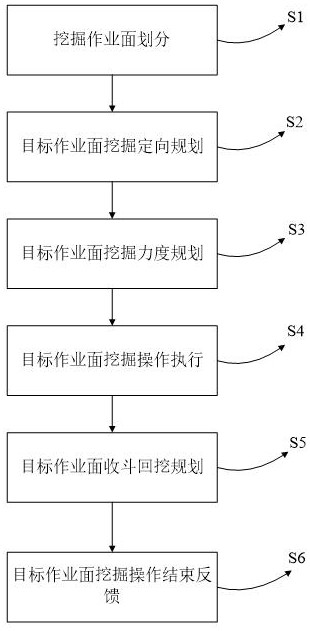
2、本发明的目的可以通过以下技术方案实现:本发明提供一种挖掘机铲斗作业运动规划分析方法,包括:s1.挖掘作业面划分:获取目标挖掘机铲斗的相关结构参数,计算目标挖掘机铲斗单次挖掘的额定表面积,据此将挖掘作业场景划分为各挖掘作业面。
3、s2.目标作业面挖掘定向规划:将当前待执行单次挖掘操作的挖掘作业面记为目标作业面,获取目标作业面的地形勘测参数、地质勘测参数和设计挖掘深度,确定目标挖掘机铲斗针对目标作业面的切入角度。
4、s3.目标作业面挖掘力度规划:基于目标挖掘机铲斗针对目标作业面的切入角度,确定目标挖掘机铲斗针对目标作业面的挖掘力度。
5、s4.目标作业面挖掘操作执行:根据目标挖掘机铲斗针对目标作业面的切入角度和挖掘力度,对目标作业面执行单次挖掘操作。
6、s5.目标作业面收斗回挖规划:在目标挖掘机对目标作业面执行单次挖掘操作过程中实时监测铲斗液压缸内液压值,确定目标挖掘机铲斗针对目标作业面的收斗回挖时间点。
7、s6.目标作业面挖掘操作结束反馈:在目标挖掘机铲斗针对目标作业面的收斗回挖时间点进行目标作业面单次挖掘操作结束反馈。
8、优选地,所述相关结构参数包括刀口宽度、刀口长度和挖掘装满角度。
9、优选地,所述计算目标挖掘机铲斗单次挖掘的额定表面积,包括:提取目标挖掘机铲斗相关结构参数中的刀口宽度和刀口长度,计算目标挖掘机铲斗的刀口横截面积,,将其作为目标挖掘机铲斗单次挖掘的额定表面积。
10、优选地,所述地形勘测参数包括坡度、高差和坡面曲率。
11、所述地质勘测参数包括土层土壤的类型、密度、孔隙度和含水量、土层内各石块的分布位置、体积和硬度。
12、优选地,所述确定目标挖掘机铲斗针对目标作业面的切入角度,包括:s21.根据目标作业面的地形勘测参数,分析目标挖掘机铲斗斗齿针对目标作业面的地形切入难度系数,其计算公式为:,其中分别为预设的挖掘机铲斗斗齿切入地形条件的理想坡度、理想高差和允许坡面曲率阈值,为自然常数,获取目标挖掘机铲斗斗齿针对目标作业面的地形切入难度系数所处范围,根据web云端存储的挖掘机铲斗斗齿针对作业面各地形切入难度系数范围对应的适宜切入角度范围,确定目标挖掘机铲斗斗齿针对目标作业面的一类切入角度范围。
13、s22.获取目标作业面的设计挖掘深度所处挖掘深度范围,根据web云端存储的挖掘机铲斗斗齿针对作业面各挖掘深度范围对应的适宜切入角度范围,确定目标挖掘机铲斗斗齿针对目标作业面的二类切入角度范围。
14、s23.将目标挖掘机铲斗斗齿针对目标作业面的一类切入角度范围和二类切入角度范围进行交集处理,得到目标挖掘机铲斗斗齿针对目标作业面的参照切入角度范围,提取该范围内的各参照切入角度。
15、s24.以目标挖掘机铲斗单次挖掘的额定表面积为底面积,以目标作业面的设计挖掘深度为高,构建目标作业面的三维挖掘模型,并结合目标作业面地质勘测参数中土层内各石块的分布位置和体积,在目标作业面的三维挖掘模型内相应位置呈现各石块模型,进而在目标作业面的三维挖掘模型中模拟目标挖掘机铲斗斗齿以各参照切入角度切入目标作业面的运行轨迹,记为各参照运行轨迹,计算目标挖掘机铲斗斗齿在各参照运行轨迹的综合切入阻力系数,其中为各参照运行轨迹的编号,。
16、s25.比对目标挖掘机铲斗斗齿在各参照运行轨迹的综合切入阻力系数,筛选其中最小值,将其对应参照运行轨迹的参照切入角度作为目标挖掘机铲斗针对目标作业面的切入角度。
17、优选地,所述计算目标挖掘机铲斗斗齿在各参照运行轨迹的综合切入阻力系数,包括:s241.根据目标作业面的地质勘测参数中土层土壤的类型、孔隙度和含水量,提取web云端存储的目标作业面土层土壤类型对应的土质松散程度因子,计算目标挖掘机铲斗斗齿在参照运行轨迹的土质切入阻力系数,,其中分别为预设的土层土壤参照孔隙度和参照含水量。
18、s242.将位于参照运行轨迹上的石块记为涉及石块,进而得到各参照运行轨迹上的各涉及石块,从目标作业面的地质勘测参数中提取各参照运行轨迹上的各涉及石块的硬度,其中表示各涉及石块的编号,,计算目标挖掘机铲斗斗齿在各参照运行轨迹的特定切入阻力系数,。
19、s243.由公式得到目标挖掘机铲斗斗齿在各参照运行轨迹的综合切入阻力系数,为预设的土质切入阻力系数、特定切入阻力系数对应权重占比。
20、优选地,所述确定目标挖掘机铲斗针对目标作业面的挖掘力度,包括:s31.根据目标挖掘机铲斗针对目标作业面的切入角度对应的斗齿运行轨迹的综合切入阻力系数,由判定模型得到目标挖掘机铲斗斗齿的切入阻力等级,其中分别为预设的挖掘机铲斗斗齿的切入阻力b级对应综合切入阻力系数范围的下限值、上限值。
21、s32.根据web云端存储的挖掘机铲斗斗齿各切入阻力等级对应的挖掘力度,获取目标挖掘机铲斗针对目标作业面的计划挖掘力度。
22、s33.获取目标挖掘机当天各已挖掘作业面的挖掘深度、计划挖掘力度和实际挖掘力度,其中为当天各已挖掘作业面的编号,,计算目标挖掘机单位挖掘深度的修正挖掘力度,,其中为当天各已挖掘作业面数量。
23、s34.根据目标作业面的设计挖掘深度,由公式得到目标挖掘机铲斗针对目标作业面的挖掘力度。
24、优选地,所述确定目标挖掘机铲斗针对目标作业面的收斗回挖时间点,包括:s51.根据目标挖掘机铲斗的相关结构参数和目标作业面的设计挖掘深度,分析目标挖掘机铲斗的参照装载量。
25、s52.根据web云端存储的目标挖掘机制造商提供的目标挖掘机铲斗在各测试装载量下的液压缸内液压值,构建以测试装载量为横轴,以液压值为纵轴的坐标系,生成目标挖掘机铲斗液压缸的液压性能测试折线图,导入matlab软件中并利用matlab软件的拟合工具获取目标挖掘机铲斗液压缸的液压性能测试折线的最佳拟合函数。
26、将目标挖掘机铲斗的参照装载量代入最佳拟合函数,得到目标挖掘机铲斗在参照装载量下的液压缸内液压值,记为。
27、s53.获取目标挖掘机对目标作业面执行单次挖掘操作过程中各单位时间点的铲斗液压缸内液压值,其中为各单位时间点的编号,,由公式得到目标挖掘机单位时间铲斗液压缸内液压变化值,为目标挖掘机对目标作业面执行单次挖掘操作过程中第个单位时间点的铲斗液压缸内液压值,为单位时间点数量。
28、s54.若目标挖掘机对目标作业面执行单次挖掘操作过程中某单位时间点的铲斗液压缸内液压值满足条件,则将该单位时间点作为目标挖掘机铲斗针对目标作业面的收斗回挖时间点。
29、优选地,所述分析目标挖掘机铲斗的参照装载量,包括:根据目标挖掘机铲斗的相关结构参数中刀口宽度和挖掘装满角度,结合目标作业面的设计挖掘深度,由公式得到目标挖掘机铲斗针对目标作业面的挖掘容量,其中为圆周率。
30、提取目标作业面的地质勘测参数中土层土壤密度,由公式得到目标挖掘机铲斗的参照装载量。
31、相较于现有技术,本发明的有益效果如下:(1)本发明根据目标挖掘机铲斗单次挖掘的额定表面积将挖掘作业场景划分为各挖掘作业面,更好地根据每个挖掘作业面的特点进行有针对性的挖掘,从而提高挖掘精度和挖掘效率。
32、(2)本发明综合目标作业面的地形、地质以及设计挖掘深度,获取挖掘机铲斗斗齿针对目标作业面的参照切入角度范围内各参照切入角度,利用可视化模型模拟目标挖掘机铲斗斗齿以各参照切入角度切入目标作业面的运行轨迹,更直观地观察铲斗的运行轨迹和阻力情况,以最小综合切入阻力系数对应参照运行轨迹的参照切入角度作为目标挖掘机铲斗针对目标作业面的切入角度,实现目标挖掘机铲斗挖掘目标作业面时斗齿切入阻力最小化,进而有效帮助减少目标挖掘机铲斗的磨损。
33、(3)本发明通过获取目标挖掘机铲斗斗齿的切入阻力等级,确定目标挖掘机铲斗针对目标作业面的计划挖掘力度,并结合当天已挖掘作业面的相关参数进行力度修正,确定目标挖掘机铲斗针对目标作业面的挖掘力度,帮助目标作业面更好地选择适宜挖掘力度,从而有效避免挖掘机挖掘能源浪费情况发生,更保证目标作业面的挖掘质量和挖掘效率。
34、(4)本发明通过在目标挖掘机对目标作业面执行单次挖掘操作过程中实时监测铲斗液压缸内液压值,精确确定目标挖掘机铲斗针对目标作业面的收斗回挖时间点,避免挖掘机在过度挖掘的情况下对设备造成损害,从而延长了挖掘机铲斗的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!