能稳定移动的最优化机器人导航系统、方法、设备及介质
本发明涉及机器人导航领域,尤其涉及一种能稳定移动的最优化机器人导航系统、方法、设备及介质。
背景技术:
1、当前自主移动机器人越来越多的出现在日常生活中,在餐厅里,送餐机器人往往需要满足在密集人群中保持稳定,高效的移动,将食物传送至客户手中。这依赖机器人的自主避障能力,当前机器人导航局部避障方法如动态窗口法,见参考文献[1],依赖精心设计的代价函数进行决策,其计算效率高,适用于实时运动规划,但是对复杂环境适应性较差,容易陷入局部最优解,很难在动态行人环境顺利的抵达目标点。时间橡皮筋方法,见参考文献[2],基于图优化的方法同时对二维路径点及其两点间的时间进行规划,其可以规划平滑而连续的轨迹,对复杂和动态环境的适应性好,但是其计算复杂度较高,实现较为复杂,对参数调节也比较敏感。
2、有鉴于此,特提出本发明。
3、[1]fox d,burgard w,thrun s.the dynamic window approach to collisionavoidance[j].ieee robotics&automation magazine,1997,4(1):23-33.
4、[2]c.w.feiten,t.f.hoffmann and t.bertram:trajectorymodification considering dynamic constraints of autonomous robots.proc.7thgerman conference on robotics,germany,munich,may 2012,pp 74–79.
技术实现思路
1、本发明的目的是提供了一种能稳定移动的最优化机器人导航系统、方法、设备及介质,能在自主移动机器人高于1m/s的速度移动时保持速度稳定,满足机器人自主送餐、送货等需求,进而解决现有技术中存在的上述技术问题。
2、本发明的目的是通过以下技术方案实现的:
3、一种能稳定移动的最优化机器人导航系统,用于控制自主移动机器人在复杂人群中送货时实现最优化稳定移动导航,包括:
4、路径规划模块、速度规划模块和速度控制模块;其中,
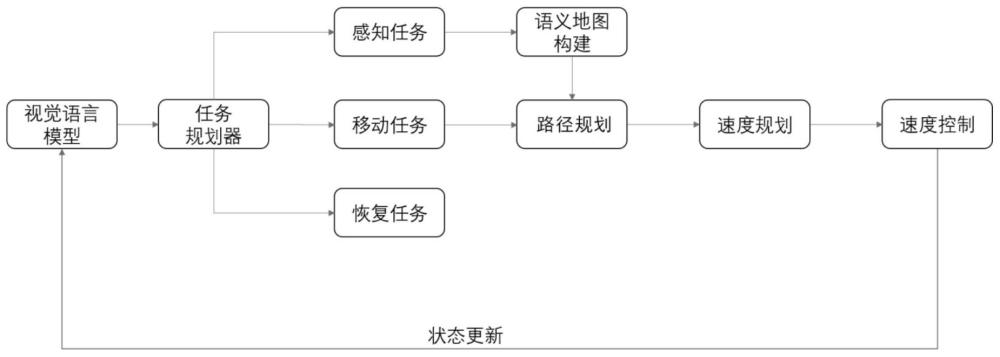
5、所述路径规划模块,能在机器人感知地图中从起始点至目标点生成一条能实时通行的初始路径作为初始参考线,对初始参考线进行初次平滑处理后作为最优化基准线,在满足安全性约束条件下对最优化基准线进行最终平滑得到最优化路径;
6、所述速度规划模块,与所述路径规划模块通信连接,能根据所述路径规划模块输出的最优化路径计算该最优化路径上的每一个路径点的机器人的最佳线速度;
7、所述速度控制模块,分别与所述路径规划模块与速度规划模块通信连接,能在使机器人当前维持所述速度规划模块输出的最佳恒定线速度状态下,通过跟随算法输出一个最优的角速度控制机器人准确地跟随所述路径规划模块输出的最优化路径上的路径点移动。
8、一种能稳定移动的最优化机器人导航方法,采用本发明所述的能稳定移动的最优化机器人导航系统,包括以下步骤:
9、通过所述系统的路径规划模块在机器人感知地图中从起始点至目标点生成一条能实时通行的初始路径作为初始参考线,对初始参考线进行初次平滑处理后作为最优化基准线,在满足安全性约束条件下对最优化基准线进行最终平滑得到最优化路径;
10、通过所述系统的速度规划模块根据所述路径规划模块输出的最优化路径计算该最优化路径上的每一个路径点的机器人的最佳线速度;
11、通过所述系统的速度控制模块在使机器人当前维持所述速度规划模块输出的最佳恒定线速度状态下,通过跟随算法输出一个最优的角速度控制机器人准确地跟随所述路径规划模块输出的最优化路径上的路径点移动。
12、一种处理设备,包括:
13、至少一个存储器,用于存储一个或多个程序;
14、至少一个处理器,能执行所述存储器所存储的一个或多个程序,在一个或多个程序被处理器执行时,使得所述处理器能实现本发明所述的方法。
15、一种可读存储介质,存储有计算机程序,当计算机程序被处理器执行时能实现本发明所述的方法。
16、与现有技术相比,本发明所提供的能稳定移动的最优化机器人导航系统、方法、设备及介质,其有益效果包括:
17、通过路径规划模块、速度规划模块和速度控制模块协同控制机器人,实现在复杂人群中运送物品时,能基于参考线平滑的控制机器人,在任何路径点上均保持移动不突变,本发明的系统及方法,能在自主移动机器人高于1m/s的速度移动时保持速度稳定,满足机器人自主送餐、送货等需求,如送餐机器人在复杂人群中运送咖啡时,咖啡不撒出来的情况。
技术特征:
1.一种能稳定移动的最优化机器人导航系统,其特征在于,用于控制自主移动机器人在复杂人群中送货时实现最优化稳定移动导航,包括:
2.根据权利要求1所述的能稳定移动的最优化机器人导航系统,其特征在于,所述路径规划模块包括:
3.根据权利要求1或2所述的能稳定移动的最优化机器人导航系统,其特征在于,所述速度规划模块按以下方式根据所述路径规划模块输出的最优化路径计算该最优化路径上的每一个路径点的机器人的最佳线速度,包括:
4.一种能稳定移动的最优化机器人导航方法,其特征在于,采用权利要求1-3任一项所述的能稳定移动的最优化机器人导航系统,包括以下步骤:
5.根据权利要求4所述的能稳定移动的最优化机器人导航方法,其特征在于,所述路径规划模块按以下方式在机器人感知地图中从起始点至目标点生成一条能实时通行的初始路径作为初始参考线,对初始参考线进行初次平滑处理后作为最优化基准线,在满足安全性约束条件下对最优化基准线进行最终平滑得到最优化路径,包括:
6.根据权利要求4所述的能稳定移动的最优化机器人导航方法,其特征在于,通过所述系统的速度规划模块按以下方式根据所述路径规划模块输出的最优化路径计算该最优化路径上的每一个路径点的机器人的最佳线速度,包括:
7.一种处理设备,其特征在于,包括:
8.一种可读存储介质,其特征在于,存储有计算机程序,当计算机程序被处理器执行时能实现权利要求4-6任一项所述的方法。
技术总结
本发明公开一种能稳定移动的最优化机器人导航系统、方法、设备及介质,包括:路径规划模块,能在机器人感知地图中从起始点至目标点生成一条能实时通行的初始路径作为初始参考线,将初始参考线初次平滑为最优化基准线,在满足安全性约束条件下对最优化基准线最终平滑得到最优化路径;速度规划模块,能根据最优化路径计算该最优化路径上的每一个路径点的机器人的最佳线速度;速度控制模块,能在使机器人当前维持最佳恒定线速度状态下,通过跟随算法输出一个最优的角速度控制机器人准确地跟随路径规划模块输出的最优化路径上的路径点移动。该系统及方法在自主移动机器人高于1m/s的速度移动时保持速度稳定,满足机器人自主送餐、送货等需求。
技术研发人员:裘悫成,吉建民
受保护的技术使用者:中国科学技术大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!