一种已知边界的面向机器人集群任务区域分配的方法
本发明属于机器人应用,特别是涉及一种已知边界的面向机器人集群任务区域分配的方法。
背景技术:
1、近年来,机器人逐渐进入人类的生产和生活的诸多领域中,例如搜索救援、室内清扫、区域消杀等。为保证区域能够被全覆盖,机器人的全覆盖路径规划问题成为一个热点问题。机器人集群全覆盖任务区域分配的目的是服务于全覆盖集群路径规划,而该路径规划是一个具有挑战性的问题,因为机器人集群需要共享空间,这会导致机器人集群覆盖路径规划容易出现路径冲突,最终产生碰撞和死锁等问题。
2、国内外对于多机器人全覆盖路径规划问题的研究,通常的做法是首先将任务区域进行分割,然后,规划路径用以覆盖整个区域。面向已知环境的机器人集群任务区域分配算法需要具有满足以下3个条件:(i)可以按比例分配,即可以按照机器人集群成员的初始位置、集群规模(机器人个数)和集群成员的任务执行能力进行分配,即充分利用每个机器人的能力;(ii)子区域内需要完全连通。每个子区域内部需要完全连通,因为不连通区域会增加机器人的运动成本,更有可能造成机器人之间的碰撞;(iii)全覆盖,即所有分配的子区域的和为已知边界的任务区域。
3、现有的任务区域方法分为单元分解法和聚类法。这些算法均无法同时满足以上3个条件。例如,boustrophedon cellular decomposition是一种单元分解法,该方法虽然可对有障碍物环境空间进行分割,但是这种方法因将环境划分成不可控制数量的细碎子区域而无法用于机器人的任务分配。k均值聚类法(k-means)是最为常用的一种聚类法,基于该方法的区域分割法能够将全部区域划分成大致相等的子区域,并且可以设定分区的个数,但是该方法容易产生区域内不连通的情形,并且无法指定各区域的分配大小。因此,有必要研究全覆盖任务区域的合理分配方法。
技术实现思路
1、本发明的目的是提供一种已知边界的面向机器人集群任务区域分配的方法,该方法将已知边界的二维环境地图栅格化,根据集群机器人的初始位置和集群成员的任务执行能力,自动化地计算任务子区域,将任务区域划分为与机器人集群数量相同的子区域,并且子区域内部区域是完全连通的,以解决上述现有技术存在的问题。
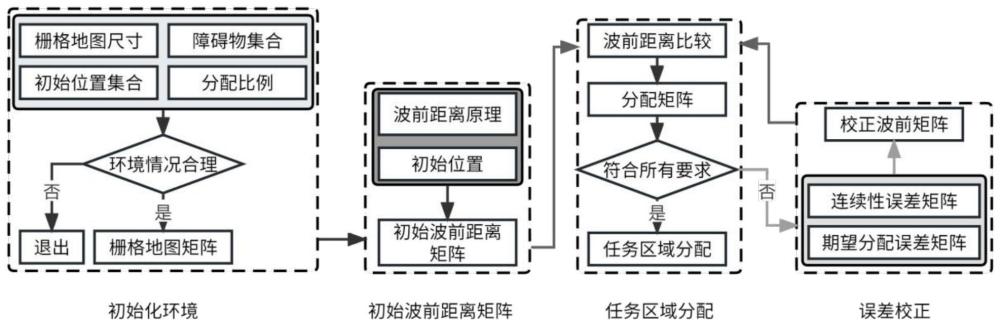
2、为实现上述目的,本发明提供了一种已知边界的面向机器人集群任务区域分配的方法,包括以下步骤:
3、对整个任务空间建立栅格地图;
4、基于栅格地图和机器人集群的初始位置,构建栅格地图矩阵;
5、基于所述栅格地图矩阵,获得栅格地图上的所有单元格的波前距离矩阵;
6、基于所述波前距离矩阵,对任务区域进行初始分配;
7、预设分配要求,对初始分配结果进行误差校正,直至满足所述分配要求,获得最终分配结果。
8、可选地,构建栅格地图矩阵的过程包括:首先基于栅格地图,根据障碍物的初始位置、机器人的初始位置和机器人分配比例;然后判断障碍物和机器人的初始位置是否在栅格地图内,判断机器人的初始位置是否与障碍物的初始位置重合,判断所有机器人分配比例之和是否为1,若上述情况均合理,则栅格地图的环境情况均合理,获得栅格地图矩阵。
9、可选地,所述栅格地图矩阵代表栅格地图上各单元所的含义,包括障碍物单元、待覆盖的单元和被机器人占领的单元。
10、可选地,获得波前距离矩阵的过程如下式所示:
11、
12、其中,(xi,yi)为第i个机器人的初始位置点,χ为除了第i个机器人除了起点外的待覆盖栅格单元格,d为χ到(xi,yi)波前距离,{1,...,rn}为机器人的编号,共有n个机器人。
13、可选地,对任务区域进行初始分配的过程包括:基于所述波前距离矩阵,获得分配矩阵,基于所述分配矩阵,获得每个机器人分配的区域,基于所述每个机器人分配的区域,获得每个机器人的实际分配单元数量。
14、可选地,所述分配要求包括:每个机器人的实际分配单元数量与期望分配单元数量相比在误差之内,且各机器人分配的子区域具有连续性。
15、可选地,获取所述期望分配单元数量的过程包括:基于所述栅格地图矩阵、机器人分配比例、障碍物的初始位置以及机器人个数,获得每个机器人的期望分配单元数量。
16、可选地,对初始分配结果进行误差校正的过程包括:基于期望分配误差矩阵和连续性误差矩阵对波前距离矩阵进行校正,基于校正后的波前距离矩阵对任务区域进行重新分配。
17、本发明的技术效果为:
18、本发明只需获取二维环境的边界、障碍物区域、机器人集群的初始位置、机器人集群的分配比例,便可自动计算任务区域的分配,该方法可以满足任务分配区域满足已知边界的二维环境中机器人集群的任务区域分配的三个需求,按比例,子区域内全连通和全覆盖。这样合理的任务区域分配方法不仅能够提升机器人集群的整体效能,还有助于优化资源利用,从而更好地满足全覆盖任务的需求。
技术特征:
1.一种已知边界的面向机器人集群任务区域分配的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
3.根据权利要求2所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
4.根据权利要求1所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
5.根据权利要求1所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
6.根据权利要求1所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
7.根据权利要求6所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
8.根据权利要求1所述的已知边界的面向机器人集群任务区域分配的方法,其特征在于,
技术总结
本发明公开了一种已知边界的面向机器人集群任务区域分配的方法,包括以下步骤:对整个任务空间建立栅格地图;基于栅格地图和机器人集群的初始位置,构建栅格地图矩阵,来代表栅格地图上各单元的含义,有障碍物单元、待覆盖的单元和被机器人占领的单元;基于栅格地图矩阵,获得栅格地图上的所有单元格的波前距离矩阵;基于所述波前距离矩阵,对任务区域进行初始分配;预设分配要求,对初始分配结果进行误差校正,直至满足所述分配要求,获得最终分配结果。本发明的任务区域分配方法不仅能够提升机器人集群的整体效能,还有助于优化资源利用,从而更好地满足全覆盖任务的需求。
技术研发人员:闫金金,王萍,张家豪,韩海程,高文霞,高逸松,汲赫婵
受保护的技术使用者:青岛哈尔滨工程大学创新发展中心
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!