一种基于实际运行工况的纯电动重卡IPMSM矢量控制方法
本发明涉及纯电动重卡,具体为一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法。
背景技术:
1、当前中国存在着一定的能源安全问题和环境问题,鉴于新能源汽车产业是解决能源安全和环境问题的有效途径,重卡产业,尤其是纯电动重卡,已经成为能源结构转变趋势的积极响应者。
2、现有技术中,目前纯电动重卡存在的精细化不足的问题,由于车载电机是纯电动重卡的核心部件之一,在实际运行工况中,不同场景中传统矢量控制方法无法使其长期运行于额定转速以上,难以用户的使用需求。
技术实现思路
1、本发明的目的在于提供一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,以解决上述背景技术提出的对于目前纯电动重卡存在的精细化不足的问题,由于车载电机是纯电动重卡的核心部件之一,在实际运行工况中,不同场景中传统矢量控制方法无法使其长期运行于额定转速以上,难以用户的使用需求的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,包括以下步骤:
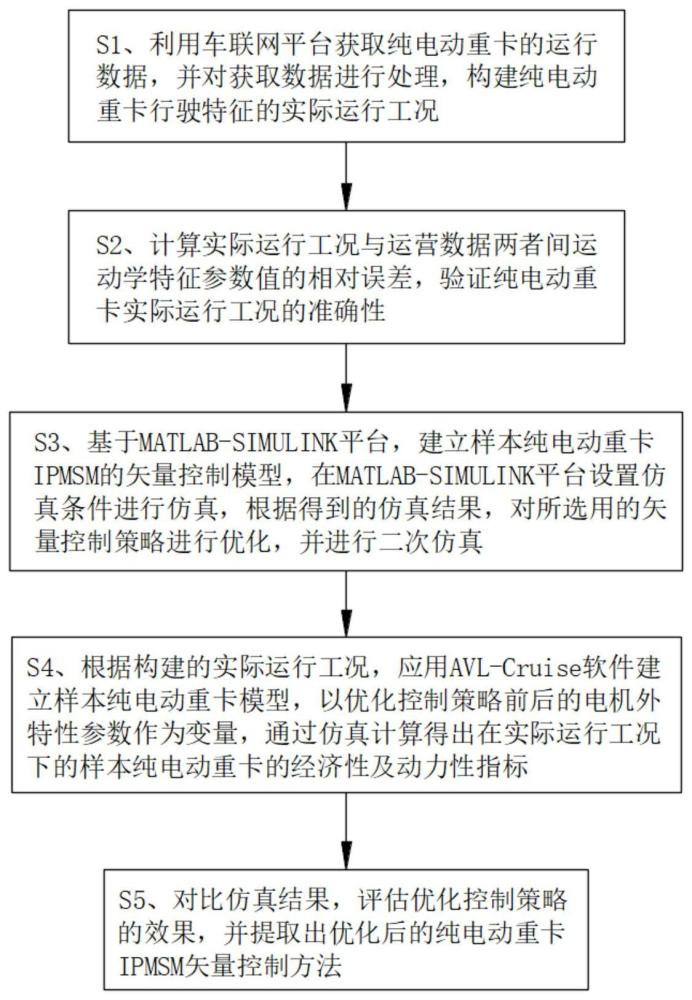
3、s1、利用车联网平台获取纯电动重卡的运行数据,并对获取数据进行处理,构建纯电动重卡行驶特征的实际运行工况,通过从各类运动学片段库中选取具有代表性的片段,构建一条能体现样本纯电动重卡行驶特征的实际运行工况曲线;
4、s2、计算实际运行工况与运营数据两者间运动学特征参数值的相对误差,验证纯电动重卡实际运行工况的准确性;
5、s3、基于matlab-simulink平台,建立样本纯电动重卡ipmsm的矢量控制模型,在matlab-simulink平台设置仿真条件进行仿真,根据得到的仿真结果,对所选用的矢量控制策略进行优化,并进行二次仿真;
6、s4、根据构建的实际运行工况,应用avl-cruise软件建立样本纯电动重卡模型,以优化控制策略前后的电机外特性参数作为变量,通过仿真计算得出在实际运行工况下的样本纯电动重卡的经济性及动力性指标;
7、s5、对比仿真结果,评估优化控制策略的效果,并提取出优化后的纯电动重卡ipmsm矢量控制方法。
8、优选的,在步骤s1中,所述利用车联网平台获取纯电动重卡的运行数据的流程为:首先通过前端车辆设备从can总线、各类传感器上不断地采集车辆运行数据和驾驶员的操控行为信息,同时接收gps卫星定位信息记录车辆所在位置,然后通过3g/4g无线通讯网络将数据信息实时传递到车联网平台。
9、优选的,在步骤s1中,所述对获取数据进行处理,构建纯电动重卡行驶特征的实际运行工况包括以下步骤:
10、s11、获取的行驶数据进行预处理,包括gps信号缺失数据、怠速数据、最高速度及加速度限制和速度滤波处理;
11、s12、将车辆行驶数据进行运动学片段划分,运用主成分分析和k均值聚类法对特征参数进行降维和分类;
12、s13、从各类运动学片段库中选取具有代表性的片段,构建纯电重卡的行驶工况。
13、优选的,在步骤s2中,所述相对误差的计算公式如下:
14、
15、式中,ck、uk分别为构建工况和原始样本数据的第k个特征参数,n为特征参数个数。
16、优选的,在步骤s3中,所述建立样本纯电动重卡ipmsm的矢量控制模型中,将永磁同步电机的数学模型从三相静止坐标系变换到两相旋转坐标系,永磁同步电机在dq坐标系下的数学模型为:
17、定子电压方程;
18、
19、磁链方程:
20、
21、电磁扭矩方程:
22、te=np(ψdiq-ψqid);
23、机械运动方程:
24、
25、式中,ud、uq、id、iq、ψd、ψq为定子电压、定子电流、定子磁链的dq轴分量,rs是定子每相电阻,ld、lq是定子电感的dq轴分量,te为电磁转矩,ψf为永磁体磁链,np为极对数,tl是折算到电机轴端的负载转矩,ωe为转子电角速度,j为折算到电机轴端的转动惯量。
26、优选的,在步骤s4中,所述应用avl-cruise软件建立样本纯电动重卡模型包括整车模型、动力电池模型、电附件模型、电机系统模型、主减速器含差速器模型、制动器模型、轮胎模型和驾驶室模型,通过仿真计算得出在实际运行工况下的样本纯电动重卡的经济性及动力性指标,表明对样本纯电动重卡ipmsm矢量控制策略的优化在提升经济性及动力性指标方面有积极作用。
27、优选的,在步骤s4中,所述仿真计算包括动力性仿真计算和经济性仿真计算;
28、所述动力性仿真计算通过avl-cruise软件分别进行稳态行驶性能分析、全负荷加速性能分析和爬坡性能分析;
29、所述经济性仿真计算通过avl-cruise软件进行循环行驶工况分析验证纯电动重卡的百公里电耗和续航里程。
30、优选的,在步骤s5中,所述对比仿真结果,评估优化控制策略的效果的流程为:对仿真结果进行分析,评估优化后的控制策略对经济性和动力性能的影响,若优化控制策略对经济性及动力性指标具有提升,则确定最佳参数配置,若优化控制策略对经济性及动力性指标没有提升,则重新进行矢量控制策略优化。
31、与现有技术相比,本发明的有益效果是:
32、本方法中通过纯电动重卡的实际运行数据精准定义纯电动重卡的使用场景,建立纯电动重卡ipmsm的矢量控制模型,设置仿真条件,根据得到的仿真结果,对所选用的矢量控制策略进行优化,并进行二次仿真,选取一种较为合适的控制策略并进行一定程度的优化,在此基础上通过动力性仿真计算和经济性仿真计算得出了在实际运行工况下的样本纯电动重卡的经济性及动力性指标;对比仿真结果,结果表明对样本纯电动重卡ipmsm矢量控制策略的优化在提升经济性及动力性指标方面有积极作用,使商品车辆更贴合用户的使用需求。
技术特征:
1.一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s1中,所述利用车联网平台获取纯电动重卡的运行数据的流程为:首先通过前端车辆设备从can总线、各类传感器上不断地采集车辆运行数据和驾驶员的操控行为信息,同时接收gps卫星定位信息记录车辆所在位置,然后通过3g/4g无线通讯网络将数据信息实时传递到车联网平台。
3.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s1中,所述对获取数据进行处理,构建纯电动重卡行驶特征的实际运行工况包括以下步骤:
4.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s2中,所述相对误差的计算公式如下:
5.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s3中,所述建立样本纯电动重卡ipmsm的矢量控制模型中,将永磁同步电机的数学模型从三相静止坐标系变换到两相旋转坐标系,永磁同步电机在dq坐标系下的数学模型为:
6.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s4中,所述应用avl-cruise软件建立样本纯电动重卡模型包括整车模型、动力电池模型、电附件模型、电机系统模型、主减速器含差速器模型、制动器模型、轮胎模型和驾驶室模型。
7.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s4中,所述仿真计算包括动力性仿真计算和经济性仿真计算;
8.根据权利要求1所述的一种基于实际运行工况的纯电动重卡ipmsm矢量控制方法,其特征在于,在步骤s5中,所述对比仿真结果,评估优化控制策略的效果的流程为:对仿真结果进行分析,评估优化后的控制策略对经济性和动力性能的影响,若优化控制策略对经济性及动力性指标具有提升,则确定最佳参数配置,若优化控制策略对经济性及动力性指标没有提升,则重新进行矢量控制策略优化。
技术总结
本发明公开了一种基于实际运行工况的纯电动重卡IPMSM矢量控制方法,包括以下步骤:S1、利用车联网平台获取纯电动重卡的运行数据,并对获取数据进行处理,构建纯电动重卡行驶特征的实际运行工况。本发明通过精准定义纯电动重卡的使用场景,同时建立纯电动重卡IPMSM的矢量控制模型,进行仿真计算,选取一种较为合适的控制策略并进行一定程度的优化,在此基础上通过动力性仿真计算和经济性仿真计算得出了在实际运行工况下的样本纯电动重卡的经济性及动力性指标;对比仿真结果,结果表明对样本纯电动重卡IPMSM矢量控制策略的优化在提升经济性及动力性指标方面有积极作用,使商品车辆更贴合用户的使用需求。
技术研发人员:林添煌
受保护的技术使用者:上海电机学院
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!