基于神经网络的锅炉有害气体排放控制方法及系统与流程
本发明属于数据处理,具体是基于神经网络的锅炉有害气体排放控制方法及系统。
背景技术:
1、基于神经网络的锅炉有害气体排放控制方法是利用神经网络技术来实现锅炉燃烧过程中有害气体排放的智能化控制,结合了神经网络的模式识别和学习能力,以及对锅炉燃烧过程的建模和控制需求,为锅炉的能效提升和减少排放提供一种有效的解决方案。但是一般模型存在收敛速度慢、梯度扩散、一些神经单元在训练过程中不会被训练,导致神经元坏死现象的发生,影响模型的表示能力,降低模型的识别性能的问题;一般搜索算法存在搜索方法单一、搜索随机性不足以及搜索的精度和效率低的问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了基于神经网络的锅炉有害气体排放控制方法及系统,针对一般模型存在收敛速度慢、梯度扩散、一些神经单元在训练过程中不会被训练,导致神经元坏死现象的发生,影响模型的表示能力,降低模型的识别性能的问题,本方案通过设计自适应动量调整神经网络梯度的方法,并基于处理的数据对sigmoid激活函数进行改进,增加模型非线性表达能力和神经元的非线性映射能力,使得模型更加健壮和有鲁棒性;针对一般搜索算法存在搜索方法单一、搜索随机性不足以及搜索的精度和效率低的问题,本方案通过不同策略进行移动,同时考虑多个性能指标的优化,能够在搜索过程中寻找到具有较好综合性能的参数组合,并在搜索算法中添加参数递减控制和自适应调整,使得算法具有更强的探索能力和优化性能。
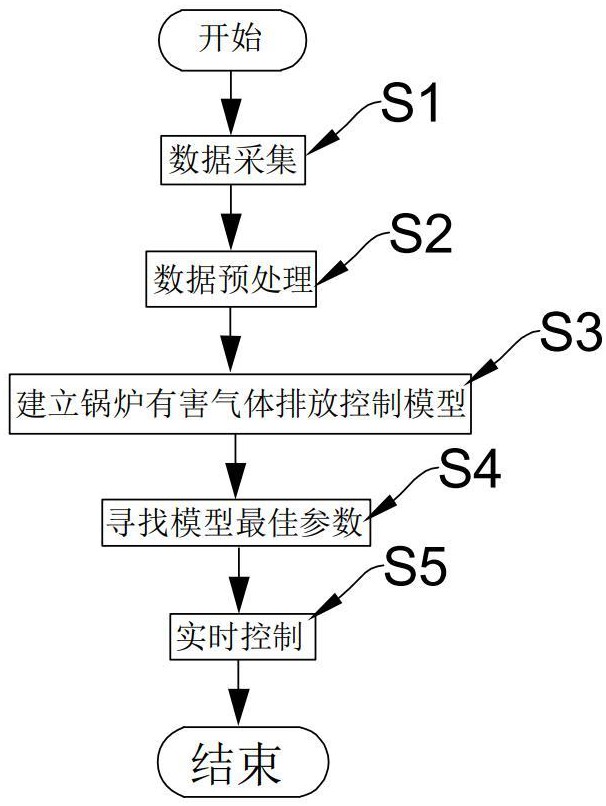
2、本发明提供的基于神经网络的锅炉有害气体排放控制方法,该方法包括以下步骤:
3、步骤s1:数据采集;
4、步骤s2:数据预处理;
5、步骤s3:建立锅炉有害气体排放控制模型;
6、步骤s4:寻找模型最佳参数;
7、步骤s5:实时控制。
8、进一步地,在步骤s1中,所述数据采集是采集温度数据、压力数据、燃气数据和有害气体排放浓度;将有害气体排放浓度作为数据标签。
9、进一步地,在步骤s2中,所述数据预处理是对采集的数据进行数据清洗、数据降维、特征标准化和对于具有高频噪声的数据进行数据平滑处理;最终划分数据集;所述划分数据集是将数据划分为训练集和测试集;利用训练集训练模型,利用测试集测试模型性能。
10、进一步地,在步骤s3中,所述建立锅炉有害气体排放控制模型是基于数据预处理后的数据集构建神经网络,使用均方误差作为损失函数,设计了一个自适应动量调整神经网络梯度的方法,并基于处理的数据对sigmoid激活函数进行改进,具体包括以下步骤:
11、步骤s31:设计自适应动量调整梯度,包括:
12、步骤s311:在神经网络梯度调整中添加动量项和动量系数,所用公式如下:
13、;
14、;
15、式中,和分别是第k+1次迭代后权重参数和偏置参数的更新值;和分别是第k次迭代的权重参数和偏置参数的当前值;η是学习率;和分别是损失函数对权重参数和偏置参数的梯度;和是动量系数,和是前一次迭代的更新量即动量项;
16、步骤s312:设计自适应动态项系数,系数的符号由当前负梯度下降方向与前一次权值更新方向之间的夹角决定;当两者夹角为锐角时,动量项的符号保证为负,否则动量项的系数取为0;所用公式如下:
17、;
18、;
19、式中,a是用于平衡自适应动量项系数大小的调整因子;和是相较于上次迭代的参数变化量;、、和分别是损失函数;α是用于控制梯度响应的幂指数;是伽马函数;是范数;
20、步骤s32:基于处理的数据对sigmoid激活函数改进,在x的正半轴上,子项0.5(x-1)被添加到sigmoid函数中,以确保保持正半轴的梯度,并增加非线性表达能力;在负半轴上,使用x和1/(1+e-x)的组合,以增加非线性表达能力和神经元的非线性映射能力,且不会杀死神经元;这种组合产生更高的神经元表达能力,并且使该网络更加健壮和有鲁棒性;此外,sigmoid函数的分母项也与x的正半轴进行线性组合,以满足梯度在正半轴上先大后小的要求,所用公式如下:
21、;
22、式中,σs(·)是模型使用的激活函数,x是输入。
23、进一步地,在步骤s4中,所述寻找模型最佳参数具体包括以下步骤:
24、步骤s41:初始化,基于参数搜索空间初始化参数个体位置,将基于参数位置建立的模型性能作为参数位置对应的适应度值;
25、步骤s42:定义策略一,包括:
26、步骤s421:将适应度值最高的三个个体作为较优解,分别命名为xα、xβ和xγ;将三个较优解的平均位置作为目标解;除三个较优解之外的参数个体作为一般解;
27、步骤s422:定义一般解移动策略,所用公式如下:
28、;
29、式中,和分别是第i个参数个体j维度第h+1次迭代和第h次迭代的位置;和分别是目标解j维度第h+1次迭代和第h次迭代的位置;t1和t2是属于0到1的随机数,相互独立;c是控制线性递减的参数;h是当前迭代次数,h是最大迭代次数;
30、步骤s423:定义较优解移动策略,所用公式如下:
31、;
32、;
33、;
34、式中,、和分别是三个较优解j维度第h+1次迭代的位置,、和分别是三个较优解j维度第h次迭代的位置;fα、fβ和fγ分别是三个较优解的影响力系数;是一般解的平均位置;
35、步骤s424:基于移动后的位置,重新选择较优解、目标解和一般解;
36、步骤s43:定义策略二,包括:
37、步骤s431:将适应度值最高的解定义为目标解;
38、步骤s432:定义移动方向,所用公式如下:
39、;
40、式中,是i个体j维度第h+1次迭代时的移动方向;是目标解j维度的位置;是i个体j位置在h次迭代时的位置;是范数;
41、步骤s433:定义移动步长,所用公式如下:
42、;
43、式中,是i个体j维度第h次迭代时的移动步长;λ是影响因子;ymax是最大适应度值,yi是i个体的适应度值;n是参数个体总数量;是i-1个体j维度第h次迭代时的位置;
44、步骤s434:定义移动策略,所用公式如下:
45、;
46、步骤s44:选择移动策略,生成随机移动数a3,a3是属于0到1的随机数,若a3>0.5,则使用移动策略一移动参数位置,否则,使用移动策略二移动参数位置;
47、步骤s45:迭代判定,预先设有适应度阈值,若存在参数个体适应度值高于适应度阈值,则基于参数个体位置建立模型;若达到最大迭代次数,则重新初始化参数位置进行搜索;否则继续生成随机移动数迭代搜索。
48、进一步地,在步骤s5中,所述实时控制是基于步骤s4搜索的模型最佳参数建立锅炉有害气体排放控制模型,实时采集温度数据、压力数据和燃气数据,当模型预测的有害气体排放浓度高于预先设定的高浓阈值时,减少染料供给量和气体供给量,并增加氧气浓度,直到预测的有害气体排放浓度低于预先设定的低浓阈值。
49、本发明提供的基于神经网络的锅炉有害气体排放控制系统,包括数据采集模块、数据预处理模块、锅炉有害气体排放控制模型建立模块、模型最佳参数寻找模块和实时控制模块;
50、所述数据采集模块采集温度数据、压力数据、燃气数据和有害气体排放浓度,并将数据发送至数据预处理模块中;
51、所述数据预处理模块对采集的数据进行数据清洗、数据降维、特征标准化和对于具有高频噪声的数据进行数据平滑处理;最终划分数据集,并将数据发送至锅炉有害气体排放控制模型建立模块;
52、所述锅炉有害气体排放控制模型建立模块基于数据预处理后的数据集构建神经网络,使用均方误差作为损失函数,设计了一个自适应动量调整神经网络梯度的方法,并基于处理的数据对sigmoid激活函数进行改进,并将数据发送至模型最佳参数寻找模块;
53、所述模型最佳参数寻找模块基于生成的随机移动数选择不同移动策略以搜索模型最佳参数,并将数据发送至实时控制模块;
54、所述实时控制模块实时采集温度数据、压力数据和燃气数据,当模型预测的有害气体排放浓度高于预先设定的高浓阈值时,减少染料供给量和气体供给量,并增加氧气浓度,直到预测的有害气体排放浓度低于预先设定的低浓阈值。
55、采用上述方案本发明取得的有益效果如下:
56、(1)针对一般模型存在收敛速度慢、梯度扩散、一些神经单元在训练过程中不会被训练,导致神经元坏死现象的发生,影响模型的表示能力,降低模型的识别性能的问题,本方案通过设计自适应动量调整神经网络梯度的方法,并基于处理的数据对sigmoid激活函数进行改进,增加模型非线性表达能力和神经元的非线性映射能力,使得模型更加健壮和有鲁棒性。
57、(2)针对一般搜索算法存在搜索方法单一、搜索随机性不足以及搜索的精度和效率低的问题,本方案通过不同策略进行移动,同时考虑多个性能指标的优化,能够在搜索过程中寻找到具有较好综合性能的参数组合,并在搜索算法中添加参数递减控制和自适应调整,使得算法具有更强的探索能力和优化性能。
- 还没有人留言评论。精彩留言会获得点赞!