机器人移动控制方法及装置、仿人机器人和可读存储介质与流程
本技术涉及机器人控制,具体而言,涉及一种机器人移动控制方法及装置、仿人机器人和可读存储介质。
背景技术:
1、随着科学技术的不断发展,机器人技术因具有极大的研究价值及应用价值受到了各行各业的广泛重视,其中仿人机器人因其外观酷似人类且功能也类似人类(例如,上肢具备操作能力,下肢具备运动能力等),能够被人类广泛接受地融入人类社会,故而仿人机器人便是当今机器人技术的一项重要研究方向。而对仿人机器人来说,其具有与人类类似的腿部结构,可以像人类一样通过复杂地形,但无法像轮式机器人一样平稳快速的运动,因此提升仿人机器人的运动速度便是仿人机器人使用过程中的一个长期课题。
2、目前,可通过使仿人机器人像人类一样使用人类的交通工具,来提升仿人机器人的运动速度,并使仿人机器人更拟人化,有助于仿人机器人在功能和人类认知等方面的发展,其中双轮平衡车便是众多交通工具中较为常用的小型交通工具。因此,如何提高仿人机器人在双轮平衡车骑行过程中的骑行稳定性和骑行平衡性,便是当今仿人机器人控制技术的一项亟需解决的重要问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种机器人移动控制方法及装置、仿人机器人和可读存储介质,能够通过控制仿人机器人在双轮平衡车上调整位姿,来保持双轮平衡车的骑行平衡,并驱动双轮平衡车在前进方向上携带着仿人机器人实现稳定的前后运动效果或静止停留效果,以有效提升仿人机器人在双轮平衡车骑行过程中的骑行稳定性和骑行平衡性,避免仿人机器人摔下双轮平衡车。
2、为了实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术提供一种机器人移动控制方法,应用于骑行在目标双轮平衡车上的仿人机器人,所述方法包括:
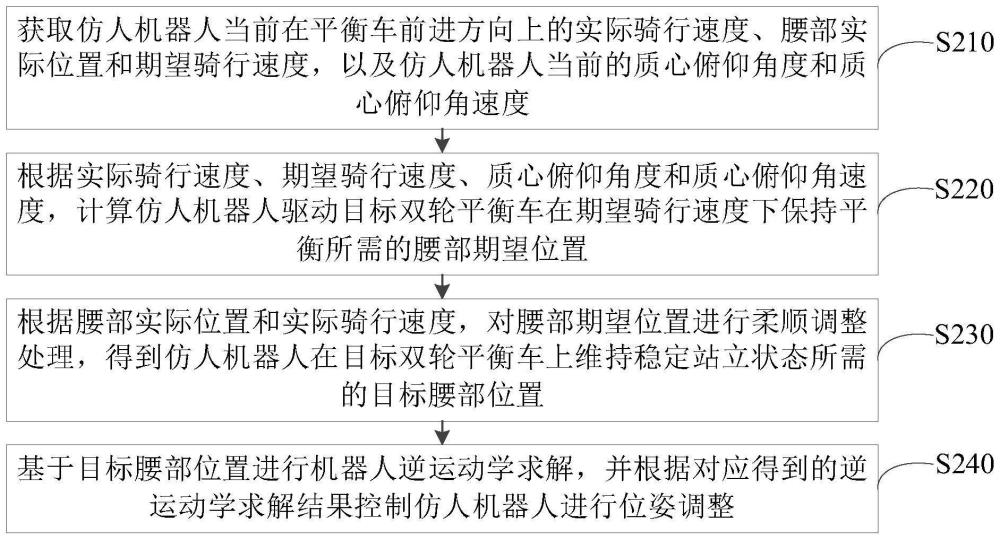
4、获取所述仿人机器人当前在平衡车前进方向上的实际骑行速度、腰部实际位置和期望骑行速度,以及所述仿人机器人当前的质心俯仰角度和质心俯仰角速度;
5、根据所述实际骑行速度、所述期望骑行速度、所述质心俯仰角度和所述质心俯仰角速度,计算所述仿人机器人驱动所述目标双轮平衡车在所述期望骑行速度下保持平衡所需的腰部期望位置;
6、根据所述腰部实际位置和所述实际骑行速度,对所述腰部期望位置进行柔顺调整处理,得到所述仿人机器人在所述目标双轮平衡车上维持稳定站立状态所需的目标腰部位置;
7、基于所述目标腰部位置进行机器人逆运动学求解,并根据对应得到的逆运动学求解结果控制所述仿人机器人进行位姿调整。
8、在可选的实施方式中,所述根据所述实际骑行速度、所述期望骑行速度、所述质心俯仰角度和所述质心俯仰角速度,计算所述仿人机器人驱动所述目标双轮平衡车在所述期望骑行速度下保持平衡所需的腰部期望位置的步骤,包括:
9、获取所述仿人机器人和所述目标双轮平衡车保持骑行平衡所需的平衡控制律方程;
10、将所述实际骑行速度、所述期望骑行速度、所述质心俯仰角度和所述质心俯仰角速度代入所述平衡控制律方程中进行方程求解,得到所述仿人机器人在平衡车前进方向上保持骑行平衡所需的腰部期望加速度,其中所述腰部期望加速度与所述期望骑行速度对应;
11、对所述腰部期望加速度进行二次积分运算,得到所述仿人机器人在平衡车前进方向上的腰部期望位置。
12、在可选的实施方式中,所述平衡控制律方程采用如下式子进行表达:
13、
14、其中,vdes用于表示所述仿人机器人在平衡车前进方向上的期望骑行速度,v用于表示所述仿人机器人在平衡车前进方向上的实际骑行速度,θ用于表示所述仿人机器人的质心俯仰角度,用于表示所述仿人机器人的质心俯仰角速度,用于表示所述仿人机器人在平衡车前进方向上的与所述期望骑行速度对应的腰部期望加速度,kp用于表示与质心俯仰变化操作相关的角度控制参数,kd用于表示与质心俯仰变化操作相关的角速度控制参数,kv用于表示与平衡车移动速度变化操作相关的线速度控制参数。
15、在可选的实施方式中,所述根据所述腰部实际位置和所述实际骑行速度,对所述腰部期望位置进行柔顺调整处理,得到所述仿人机器人在所述目标双轮平衡车上维持稳定站立状态所需的目标腰部位置的步骤,包括:
16、获取所述仿人机器人当前在所述目标双轮平衡车上的零力矩点位置,以及所述仿人机器人在处于静止状态的所述目标双轮平衡车上稳定站立时于平衡车前进方向上的腰部初始位置;
17、将所述零力矩点位置、所述腰部实际位置、所述实际骑行速度和所述腰部期望位置代入到与稳定站立状态对应的腰部加速度修正方程中进行方程求解,得到所述仿人机器人当前维持稳定站立状态所需的目标腰部加速度;
18、根据所述仿人机器人在当前时刻的前一时刻于平衡车前进方向上的历史质心期望速度,以及与当前时刻对应的目标腰部加速度,基于与所述仿人机器人匹配的线性倒立摆模型进行腰部位置柔顺预测,得到所述仿人机器人在平衡车前进方向上的腰部修正位置;
19、对所述腰部初始位置和所述腰部修正位置进行位置叠加,得到所述仿人机器人在平衡车前进方向上的目标腰部位置。
20、在可选的实施方式中,所述腰部加速度修正方程采用如下式子进行表达:
21、
22、其中,xdes用于表示所述仿人机器人在平衡车前进方向上的腰部期望位置,x用于表示所述仿人机器人在平衡车前进方向上的腰部实际位置,p用于表示所述零力矩点位置在平衡车前进方向上的位置分量,用于表示所述仿人机器人在平衡车前进方向上的实际骑行速度,用于表示所述仿人机器人在平衡车前进方向上的目标腰部加速度,kxp用于表示与腰部位置变化操作相关的位置控制参数,kxd用于表示与腰部位置变化操作相关的线速度控制参数,kxz用于表示与零力矩点相关的位置控制参数。
23、在可选的实施方式中,在所述目标双轮平衡车属于存在腿控杆的双轮平衡车的情况下,所述方法还包括:
24、获取所述仿人机器人当前的期望转向角速度,并根据所述期望转向角速度计算所述仿人机器人当前在平衡车侧移方向上的腰部期望侧移位置;
25、基于与平衡车前进方向对应的目标腰部位置和与平衡车侧移方向对应的腰部期望侧移位置进行机器人逆运动学求解,并根据对应得到的逆运动学求解结果控制所述仿人机器人进行位姿调整。
26、在可选的实施方式中,在所述目标双轮平衡车属于无腿控杆的双轮平衡车的情况下,所述方法还包括:
27、获取所述仿人机器人当前的期望转向角速度,并根据所述期望转向角速度计算所述仿人机器人的双腿踝关节各自的与所述期望转向角速度匹配的期望俯仰角度;
28、基于与平衡车前进方向对应的目标腰部位置和所述仿人机器人的双腿踝关节各自对应的期望俯仰角度进行机器人逆运动学求解,并根据对应得到的逆运动学求解结果控制所述仿人机器人进行位姿调整。
29、在可选的实施方式中,所述方法还包括:
30、检测所述目标双轮平衡车施加到所述仿人机器人的机器人足底上的目标作用力是否满足接触面摩擦锥约束条件;
31、在检测到所述目标作用力不满足接触面摩擦锥约束条件的情况下,控制所述仿人机器人将所述腰部实际位置往指向所述目标双轮平衡车的目标方向进行调整,其中所述目标方向与所述平衡车前进方向相互平行。
32、第二方面,本技术提供一种机器人移动控制装置,应用于骑行在目标双轮平衡车上的仿人机器人,所述装置包括:
33、运动参数获取模块,用于获取所述仿人机器人当前在平衡车前进方向上的实际骑行速度、腰部实际位置和期望骑行速度,以及所述仿人机器人当前的质心俯仰角度和质心俯仰角速度;
34、腰部位置计算模块,用于根据所述实际骑行速度、所述期望骑行速度、所述质心俯仰角度和所述质心俯仰角速度,计算所述仿人机器人驱动所述目标双轮平衡车在所述期望骑行速度下保持平衡所需的腰部期望位置;
35、腰部位置调整模块,用于根据所述腰部实际位置和所述实际骑行速度,对所述腰部期望位置进行柔顺调整处理,得到所述仿人机器人在所述目标双轮平衡车上维持稳定站立状态所需的目标腰部位置;
36、机体位姿调整模块,用于基于所述目标腰部位置进行机器人逆运动学求解,并根据对应得到的逆运动学求解结果控制所述仿人机器人进行位姿调整。
37、在可选的实施方式中,所述装置还包括转向参数计算模块;
38、所述转向参数计算模块,用于获取所述仿人机器人当前的期望转向角速度,并在所述目标双轮平衡车属于存在腿控杆的双轮平衡车时,根据所述期望转向角速度计算所述仿人机器人当前在平衡车侧移方向上的腰部期望侧移位置,或者在所述目标双轮平衡车属于无腿控杆的双轮平衡车时,根据所述期望转向角速度计算所述仿人机器人的双腿踝关节各自的与所述期望转向角速度匹配的期望俯仰角度;
39、所述机体位姿调整模块,还用于在所述目标双轮平衡车属于存在腿控杆的双轮平衡车时,基于与平衡车前进方向对应的目标腰部位置和与平衡车侧移方向对应的腰部期望侧移位置进行机器人逆运动学求解,或者在所述目标双轮平衡车属于无腿控杆的双轮平衡车时,基于与平衡车前进方向对应的目标腰部位置和所述仿人机器人的双腿踝关节各自对应的期望俯仰角度进行机器人逆运动学求解,接着根据对应得到的逆运动学求解结果控制所述仿人机器人进行位姿调整。
40、在可选的实施方式中,所述装置还包括摩擦约束检测模块;
41、所述摩擦约束检测模块,用于检测所述目标双轮平衡车施加到所述仿人机器人的机器人足底上的目标作用力是否满足接触面摩擦锥约束条件;
42、所述腰部位置调整模块,还用于在所述摩擦约束检测模块检测到所述目标作用力不满足接触面摩擦锥约束条件的情况下,控制所述仿人机器人将所述腰部实际位置往指向所述目标双轮平衡车的目标方向进行调整,其中所述目标方向与所述平衡车前进方向相互平行。
43、第三方面,本技术提供一种仿人机器人,所述仿人机器人骑行在目标双轮平衡车上,其中所述仿人机器人包括处理器和存储器;
44、所述存储器存储有可被所述处理器执行的计算机程序,所述处理器可执行所述计算机程序,以实现前述实施方式中任意一项所述的机器人移动控制方法。
45、第四方面,本技术提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被骑行在目标双轮平衡车上的仿人机器人执行时,实现前述实施方式中任意一项所述的机器人移动控制方法。
46、在此情况下,本技术实施例的有益效果可以包括以下内容:
47、本技术根据仿人机器人当前在平衡车前进方向上的实际骑行速度、期望骑行速度,以及仿人机器人当前的质心俯仰角度和质心俯仰角速度,计算仿人机器人驱动目标双轮平衡车在期望骑行速度下保持平衡所需的腰部期望位置,并基于仿人机器人在平衡车前进方向上的腰部实际位置和实际骑行速度,对腰部期望位置进行柔顺调整处理,得到仿人机器人在目标双轮平衡车上维持稳定站立状态所需的目标腰部位置,而后基于目标腰部位置进行机器人逆运动学求解,并根据对应得到的逆运动学求解结果控制仿人机器人进行位姿调整,来保持双轮平衡车的骑行平衡,并驱动双轮平衡车在前进方向上携带着仿人机器人实现稳定的前后运动效果或静止停留效果,从而有效提升仿人机器人在双轮平衡车骑行过程中的骑行稳定性和骑行平衡性,避免仿人机器人摔下双轮平衡车。
48、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!