一种激光通信站捕获跟踪系统粗精跟踪协同控制优化方法与流程
本发明涉及激光通信,特别涉及一种激光通信站捕获跟踪系统粗精跟踪协同控制优化方法。
背景技术:
1、随着光通信技术的进一步完善,人们对光通信的传输速率的需求越来越高,传统的微波通信已经很难达到各项指标的要求。在此需求之下,激光通信传输应运而生,激光通信具有高速率、体积小、安全性能好和带宽高的特点,因此具有广泛的发展前景。由于激光通信经常用于远距离的数据通信,而激光通信系统的激光光束具有较小的束散角,而且地面终端和星上终端具有相对运动,这就需要具有很高的对准和跟踪精度,一般要求达到微弧度量级,保证能够接收到更多的有效信息。捕获跟踪系统是激光通信地面站的重要组成部分,是其实现高动态、高精度跟踪和高速率通信的前提和保障。
2、目前在激光通信捕获跟踪系统的专利相关内容上,多集中在捕获跟踪系统设备和装置,关于控制策略和优化方法涉及较少,大多数也只在实验室内部环境条件下实现了应用,没有在实际的星地激光通信上进行验证:公开号为cn115842585a,公开日为2022年10月23日,发明名称为“基于空间光束扫描的激光通信精瞄方法”,该发明在粗跟踪结束后,将信号光发射到接收端所在区域附近且带有角度偏差,通过图像处理单元对ccd上收到的光斑确定ccd上信号光的入射角再计算单元确定信号光的方向,从而快速完成精瞄工作。该发明虽然有效的实现了粗精跟踪之间的切换,但是没有考虑粗精跟踪之间的解耦,在两个激光终端相对位移较大的时候,精跟踪就会失效,导致跟踪失败。公开号为cn111665720a,公开日为2020年6月16日,发明名称为“一种卫星激光通信复合轴跟踪解耦控制系统及方法”,该发明通过神经网络自适应模型实现了粗跟踪和精跟踪之间的解耦,但是没有考虑到在实际激光通信过程中信号光在跟踪相机视场中丢失的情况,一旦发生丢失,控制系统就将失去跟踪作用,另一方面神经网络模型需要大量的数据进行训练,对于不同的跟踪装置不具备普遍适应性。公开号为cn112213872b,公开日为2020年9月11日,发明名称为“一种轻量化光学天线及基于其实现捕获跟瞄的方法”,该发明克服传统机械转台式光学天线重量功耗极大,响应时间短的问题,但是在实际激光通信站的建设中,承载的激光通信载荷和望远镜等设备不具备轻量化的条件,所以该发明没有解决在跟踪设备带宽较低的时候,无法快速的跟踪问题。
技术实现思路
1、本发明针对现有技术中的激光通信捕获跟踪系统和方法的缺陷,提出了一种激光通信站捕获跟踪系统粗精跟踪协同控制优化方法,以解决以下问题:
2、在捕获跟踪系统中的跟踪架带宽较低时,无法实现稳定的粗跟踪问题;
3、捕获跟踪系统跟踪相机开窗大小切换期间信号光丢失问题;
4、捕获跟踪系统粗精跟踪利用脱靶量进行光闭环控制期间产生的耦合问题。
5、为了解决上述技术问题,本发明的技术方案具体如下:
6、一种激光通信站捕获跟踪系统粗精跟踪协同控制优化方法,包括以下步骤:
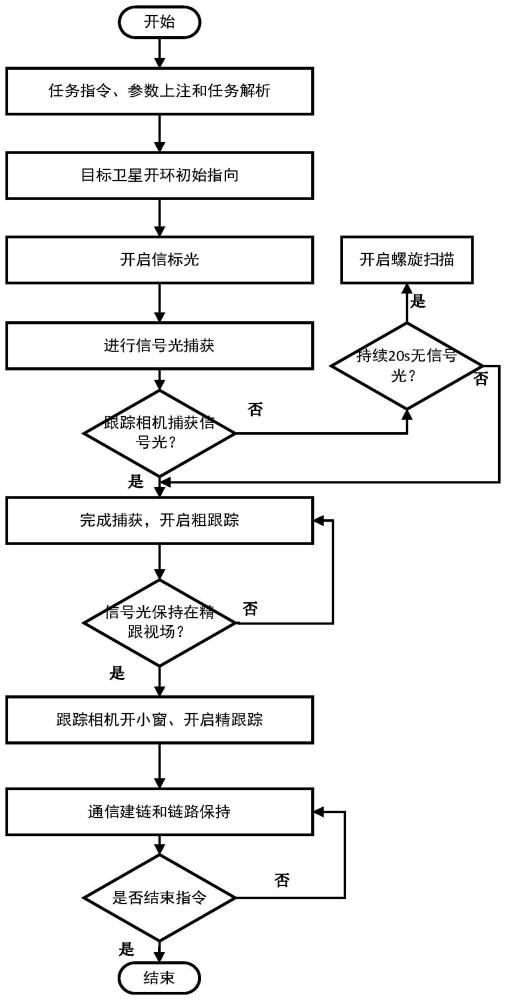
7、步骤1,对在轨目标卫星进行初始指向;
8、捕获跟踪系统利用目标卫星的精确轨道信息,计算出地面站相对目标卫星初始指向的方位、俯仰角度;
9、步骤2,等距螺旋扫描;
10、步骤3,粗跟踪;
11、将跟踪相机视场中的信号光光斑移动到精跟踪视场;
12、步骤4,粗精跟踪解耦控制;
13、通过粗精跟踪协同控制优化策略将信号光光斑锁定在精跟踪视场,建立激光通信链路并保持。
14、在上述技术方案中,步骤1具体为:
15、通过控制跟踪架带动跟踪相机完成对星上下行信号光的捕获,初始指向计算方法为:
16、
17、orik=arctan(xk/yk)*rad2deg+oricorrect
18、
19、式中:(xk,yk,zk)是k时刻视轴坐标系下的坐标值,(xstation_k,ystation_k,zstation_k)是地面站在k时刻wgs84系下的位置坐标,(xsate_k,ysate_k,zsate_k)是卫星在k时刻wgs84系下的位置坐标,是wgs84系和北东地坐标系的坐标转换矩阵;orik和pitchk分别为k时刻地面站对卫星指向的指令方位和指令俯仰角度;oricorrect和pitchcorrect分别是北东地坐标系到地面站坐标系的方位和俯仰修正量;rad2deg是弧度和度之间的转换关系,为180/π。
20、在上述技术方案中,步骤2具体为:
21、螺旋扫描的半径和步长之间的关系为:
22、
23、式中:r为螺旋扫描的半径,iθ是螺旋扫描步长,θ为极坐标变量。
24、在上述技术方案中,步骤3中,粗跟踪方位和俯仰修正累加量的计算方法为:
25、oriupdate_k=ori_tk*pixel/f
26、pitchupdate_k=pitch_tk*pixel/f
27、oricorrect_k=oricorrect_k-1+k1*oriupdate_k
28、pitchcorrect_k=pitchcorrect_k-1+k2*pitchupdate_k
29、式中:ori_tk和pitch_tk分别为k时刻方位脱靶量和俯仰脱靶量分别与光闭环中心点的偏差,pixel为像元尺寸,f为焦距,oriupdate_k为k时刻粗跟踪方位修正量累加值,pitchupdate_k为k时刻粗跟踪俯仰修正量累加值,oricorrect_k-1为k-1时刻粗跟踪方位修正量,pitchcorrect_k-1为k-1时刻粗跟踪俯仰修正量,oricorrect_k为k时刻粗跟踪方位修正量,pitchcorrect_k为k时刻粗跟踪俯仰修正量,k1和k2分别为粗跟踪方位和俯累加量的系数,系数小于1。
30、在上述技术方案中,步骤4中,精跟踪方位和俯仰修正累加量的计算方法为:
31、orip_update_k=oripzt_k
32、pitchp_update_k=pitchpzt_k
33、oripcorrect_k=oripcorrect_k-1+k3*orip_update_k
34、pitchpcorrect_k=pitchpcorrect_k-1+k4*pitchpupdate_k
35、式中:oripzt_k为k时刻快反镜x轴偏转角度,orip_update_k为k时刻精跟踪方位修正累加量,pitchpzt_k为k时刻快反镜y轴偏转角度,pitchp_update_k为k时刻精跟踪俯仰修正累加量,oripcorrect_k-1和pitchpcorrect_k-1分别为k-1时刻精跟踪方位修正量和精跟踪俯仰修正量,oripcorrect_k和pitchpcorrect_k分别为k时刻精跟踪方位修正量和精跟踪俯仰修正量,k3和k4分别为精跟踪方位和俯累加量的系数,系数小于1。
36、在上述技术方案中,步骤1和2之间还设有步骤:
37、通过信标光发射筒开启信标光,使信标光对准目标卫星;
38、通过信号光端机开启信号光,使信号光对准目标卫星;
39、目标卫星接收到信标光,会将信号光束指向激光通信地面站;
40、如果目标卫星没有接收到信标光,则捕获跟踪系统开启等距螺旋扫描,直到目标卫星接收到信标光,将信号光束指向激光通信地面站,跟踪相机完成对星上下行信号光的捕获。
41、本发明具有以下有益效果:
42、本发明的激光通信站捕获跟踪系统粗精跟踪协同控制优化方法,在粗精跟踪阶段,地面站仍然保持对卫星的初始指向,当星上信号光捕获到跟踪相机视场后,在跟踪相机开窗大小切换期间,信号光仍可以保持在跟踪相机视场,不丢失。
43、本发明的激光通信站捕获跟踪系统粗精跟踪协同控制优化方法,在初始指向方位、俯仰角度的基础上计算粗跟踪方位、俯仰角度修正量,将星上下行信号光光斑调整到精跟踪视场,即使在粗跟踪控制带宽小的时候仍能实现稳定的粗跟踪,不会导致信号光在跟踪相机的视场出现大的抖动。
44、本发明的激光通信站捕获跟踪系统粗精跟踪协同控制优化方法,在精跟踪开启的同时,将快反镜的偏转角度作为粗跟踪控制的输入,粗跟踪控制不断的调整跟踪架的转动,使快反镜始终在小范围偏转,同时保证了精跟踪的有效性,有效的实现了粗精跟踪的解耦。
- 还没有人留言评论。精彩留言会获得点赞!