机器人骑平衡车时的外力预测方法、装置及机器人与流程
本技术属于机器人,尤其涉及机器人骑平衡车时的外力预测方法、装置、机器人及计算机可读存储介质。
背景技术:
1、人形机器人是机器人领域的研究热点。人形机器人的上肢具备操作能力,下肢具备运动能力,可以像人类一样使用交通工具,例如可以骑行双轮平衡车。人形机器人骑平衡车可以兼顾人形机器人的操作能力和轮式机器人的移动能力。其中,在机器人骑平衡车时,若机器人受到外力,会导致机器人和平衡车的运动状态发生改变。例如,当在机器人背后推机器人时,会导致机器人前倾、平衡车向前加速,影响机器人的稳定性。因此,需要对机器人骑平衡车时受到的外力进行预测,从而可以在控制中对外力进行补偿,保持机器人骑平衡车时的稳定性。
技术实现思路
1、本技术实施例提供了一种机器人骑平衡车时的外力预测方法、装置、机器人及计算机可读存储介质,可以准确预测机器人骑平衡车时所受到的外力,使得可以在控制中对机器人受到的外力进行补偿,以保持机器人骑平衡车时的稳定性。
2、第一方面,本技术实施例提供了一种机器人骑平衡车时的外力预测方法,可以包括:
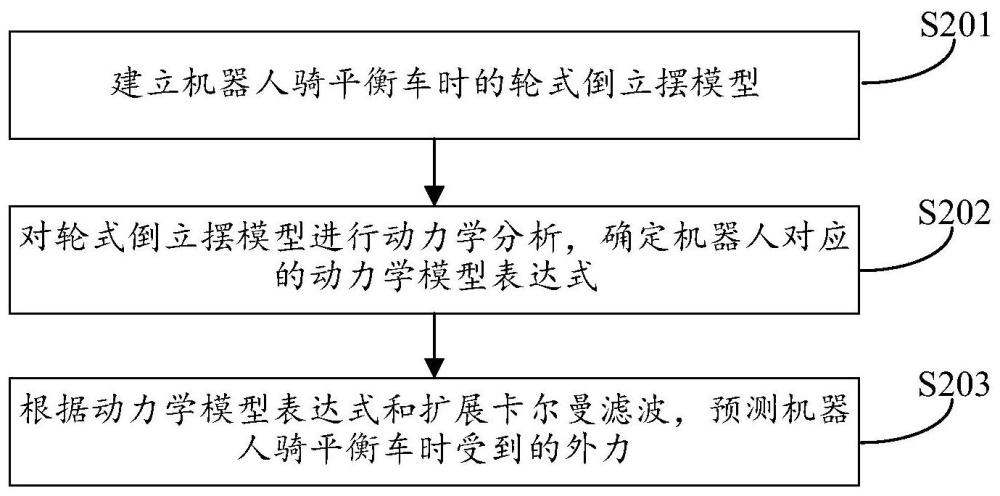
3、建立机器人骑平衡车时的轮式倒立摆模型;
4、对所述轮式倒立摆模型进行动力学分析,确定所述机器人对应的动力学模型表达式;
5、根据所述动力学模型表达式和扩展卡尔曼滤波,预测所述机器人骑平衡车时受到的外力。
6、在上述提供的机器人骑平衡车时的外力预测方法中,在需要对机器人骑平衡车时受到的外力进行预测时,可以建立机器人骑平衡车时的轮式倒立摆模型,并可以对轮式倒立摆模型进行动力学分析,确定机器人对应的动力学模型表达式。随后,可以根据动力学模型表达式和扩展卡尔曼滤波,预测机器人骑平衡车时受到的外力。即该预测方法可以准确预测机器人骑平衡车时所受到的外力,使得可以在控制中对机器人受到的外力进行补偿,以保持机器人骑平衡车时的稳定性。
7、在一种可能的实现方式中,所述动力学模型表达式包括状态表达式和观测表达式,所述根据所述动力学模型表达式和扩展卡尔曼滤波,预测所述机器人骑平衡车时受到的外力,可以包括:
8、根据所述状态表达式确定所述机器人对应的离散化状态表达式,并根据所述观测表达式确定所述机器人对应的离散化观测表达式;
9、根据所述离散化状态表达式、所述离散化观测表达式和所述扩展卡尔曼滤波,预测所述机器人在第一时刻时的第一预测状态量,所述第一预测状态量包括所述机器人在所述第一时刻受到的外力。
10、在一个示例中,所述根据所述离散化状态表达式、所述离散化观测表达式和所述扩展卡尔曼滤波,预测所述机器人在第一时刻时的第一预测状态量,可以包括:
11、获取所述机器人在第二时刻时的第二预测状态量,所述第二时刻为所述第一时刻之前的时刻;
12、根据所述第二预测状态量和所述离散化状态表达式,确定所述机器人在所述第一时刻时的候选状态量;
13、获取所述机器人在所述第一时刻时的实际观测量;
14、根据所述机器人在所述第一时刻时的实际观测量、所述离散化观测表达式和所述第一时刻对应的卡尔曼增益矩阵,对所述候选状态量进行校正,得到所述机器人在所述第一时刻时的第一预测状态量。
15、可选的,所述根据所述机器人在所述第一时刻时的实际观测量、所述离散化观测表达式和所述第一时刻对应的卡尔曼增益矩阵,对所述候选状态量进行校正,得到所述机器人在所述第一时刻时的第一预测状态量,可以包括:
16、根据下述公式确定所述机器人在所述第一时刻时的第一预测状态量:
17、x(k+1|k+1)=x(k+1|k)+k(k+1)[y(k+1)-h(x(k+1|k))];
18、其中,x(k+1|k+1)为所述机器人在所述第一时刻时的第一预测状态量,x(k+1|k)为所述机器人在所述第一时刻时的候选状态量,k(k+1)为所述第一时刻对应的卡尔曼增益矩阵,y(k+1)为所述机器人在所述第一时刻时的实际观测量,h(x(k+1|k))为根据所述第一时刻时的候选状态量预测的所述第一时刻时的预测观测量。
19、在一种可能的实现方式中,在所述根据所述机器人在所述第一时刻时的实际观测量、所述离散化观测表达式和所述第一时刻对应的卡尔曼增益矩阵,对所述候选状态量进行校正,得到所述机器人在所述第一时刻时的第一预测状态量之前,所述方法还可以包括:
20、确定所述第二预测状态量对应的第一误差协方差矩阵;
21、根据所述离散化状态表达式和所述第一误差协方差矩阵,确定所述候选状态量对应的第二误差协方差矩阵;
22、确定所述第一时刻时的测量噪声对应的协方差矩阵;
23、根据所述第二误差协方差矩阵、所述离散化观测表达式和所述测量噪声对应的协方差矩阵,确定所述第一时刻对应的卡尔曼增益矩阵。
24、示例性的,所述根据所述第二误差协方差矩阵、所述离散化观测表达式和所述测量噪声对应的协方差矩阵,确定所述第一时刻对应的卡尔曼增益矩阵,可以包括:
25、根据下述公式确定所述第一时刻对应的卡尔曼增益矩阵:
26、k(k+1)=p(k+1|k)ht(k)[h(k)p(k+1|k)ht(k)+rk+1]-1;
27、其中,k(k+1)为所述第一时刻对应的卡尔曼增益矩阵,p(k+1|k)为所述候选状态量对应的第二误差协方差矩阵,h(k)为h(x(k|k))的雅可比矩阵,h(x(k|k))为根据所述第二时刻时的第二预测状态量预测的所述第二时刻时的预测观测量,rk+1为所述第一时刻时的测量噪声对应的协方差矩阵。
28、在另一种可能的实现方式中,在所述确定所述第一时刻对应的卡尔曼增益矩阵之后,所述方法还可以包括:
29、根据所述候选状态量对应的第二误差协方差矩阵、所述离散化观测表达式和所述第一时刻对应的卡尔曼增益矩阵,确定所述第一预测状态量对应的第三误差协方差矩阵。
30、第二方面,本技术实施例提供了一种机器人骑平衡车时的外力预测装置,可以包括:
31、倒立摆模型建立模块,用于建立机器人骑平衡车时的轮式倒立摆模型;
32、动力学分析模块,用于对所述轮式倒立摆模型进行动力学分析,确定所述机器人对应的动力学模型表达式;
33、外力预测模块,用于根据所述动力学模型表达式和扩展卡尔曼滤波,预测所述机器人骑平衡车时受到的外力。
34、第三方面,本技术实施例提供了一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,使所述机器人实现上述第一方面中任一项所述的机器人骑平衡车时的外力预测方法。
35、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被机器人执行时,使所述机器人实现上述第一方面中任一项所述的机器人骑平衡车时的外力预测方法。
36、第五方面,本技术实施例提供了一种计算机程序产品,当计算机程序产品在机器人上运行时,使得机器人执行上述第一方面中任一项所述的机器人骑平衡车时的外力预测方法。
37、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!