多航天器仅姿态反馈的分布式抗退绕姿态跟踪控制方法
本发明涉及一种多航天器系统的姿态跟踪控制方法,具体涉及一种仅姿态反馈的分布式抗退绕姿态跟踪控制方法。
背景技术:
1、随着空间技术的快速发展与太空任务的复杂化,通过多个结构简单的小型航天器构成多航天器系统完成既定的空间任务正在成为一种重要的工作模式。多航天器分布式协同控制系统中的每个小型航天器能够利用并交互信息,具有独立的决策能力,因此能够更加智能地完成复杂的空间任务。分布式姿态跟踪作为多航天器系统协同控制的一项基础而又关键的技术,因其在各种空间任务中的重要应用,受到了大量的关注。
2、现有的多航天器分布式姿态跟踪控制多是在分布式观测器-姿态跟踪控制律的框架下设计的。该方法先设计分布式观测器使得其输出的估计值收敛于领航者的状态信息或输出信息,然后设计独立的姿态跟踪控制律使跟随航天器跟踪估计值。需要指出的是,针对采用单位四元数描述航天器姿态的情况,现有的分布式观测器输出的姿态四元数估计值并不能保证其始终为单位四元数。这将导致后续设计的姿态跟踪控制律不符合刚体旋转的物理学定义,对实际工程应用带来挑战。
3、一方面,在轨航天器长时间运行于强辐射、高低温的太空环境将导致多航天器的角速度测量元件老化或故障。另一方面考虑成本,多航天器系统中的各小型航天器可能无法装配角速度测量元件。因此,针对多航天器系统,考虑仅姿态反馈的分布式姿态跟踪控制问题是具有实际工程意义的。此外,现有的仅姿态反馈的分布式跟踪控制算法没有考虑退绕问题。退绕问题指的是航天器姿态与目标姿态误差在很小的范围内,但是由于控制律设计不当,导致航天器本来只需要朝着一个方向旋转一个小于180度的角度就能跟踪上目标姿态,却反向旋转一个大于180度的角度才能跟踪上目标姿态,导致不必要的燃料消耗。
技术实现思路
1、针对现有多航天器分布式姿态跟踪控制方法存在的上述问题,本发明提供了一种多航天器仅姿态反馈的分布式抗退绕姿态跟踪控制方法。该方法针对跟随航天器,设计分布式姿态四元数、角速度以及角加速度观测器,保证角加速度和角速度估计值分别指数收敛至领航航天器角加速度和角速度,姿态四元数估计值渐近收敛至领航航天器姿态四元数,并保证姿态四元数估计值始终为单位四元数;针对每个跟随航天器,在没有角速度反馈的情况下,仅利用姿态反馈信息,设计姿态跟踪控制律,保证每个跟随航天器姿态和角速度渐近跟踪分布式观测器输出的角速度与姿态四元数的估计值,并保证姿态跟踪具有抗退绕性能。
2、本发明的目的是通过以下技术方案实现的:
3、一种多航天器仅姿态反馈的分布式抗退绕姿态跟踪控制方法,包括如下步骤:
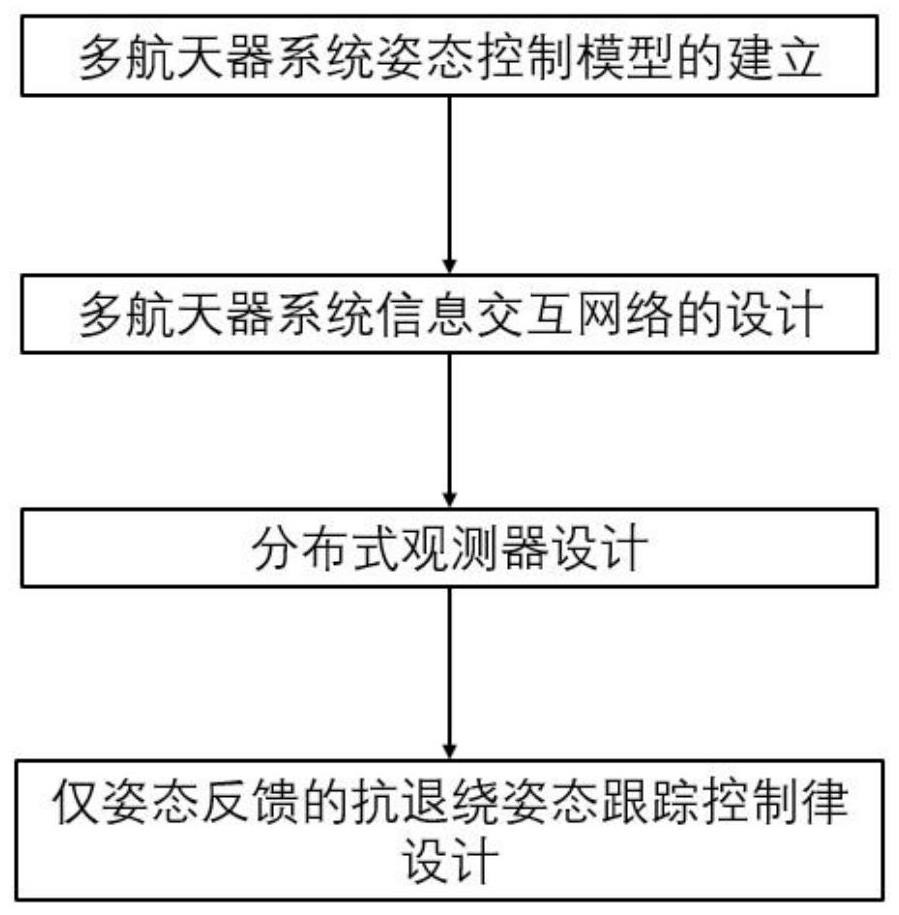
4、步骤1、多航天器系统姿态控制模型的建立
5、步骤1.1、多航天器系统相关坐标定义
6、多航天器系统由一个领航航天器以及n个跟随航天器构成,定义如下坐标系:
7、(1)地心惯性坐标系oi-xiyizi,记作其原点在地球的质心,zi轴为地球自转轴,xi轴指向春分点,yi与其他两轴构成右手旋转坐标系;
8、(2)领航航天器本体坐标系o0-x0y0z0,记作其原点在领航航天器的质心,坐标轴x0、y0、z0分别与领航航天器的惯量主轴重合;
9、(3)第i个跟随航天器本体坐标系oi-xiyizi,记作其原点在第i个跟随航天器的质心,坐标轴xi、yi、zi分别与第i个跟随航天器的惯量主轴重合;
10、步骤1.2、基于四元数的航天器姿态动力学和运动学
11、步骤1.2.1、一个四元数q采用向量的形式表示为:其中q0为四元数q的标量部分,qv=[q1 q2 q3]t为四元数q的矢量部分,将全体四元数集合记作若四元数q的欧几里德范数等于1,即此时,称q为单位四元数,将全体单位四元数集合记作对任意两个四元数定义四元数乘法其中q1,0和q1,v分别是四元数q1的标量部分和矢量部分,q2,0和q2,v分别是四元数q2的标量部分和矢量部分,“⊙”是四元数乘法符号;
12、步骤1.2.2、根据欧拉旋转定理,刚体绕固定点的任意位移,由绕通过该点的某个固定轴旋转一定角度得到,将此固定轴的单位矢量记作e,将转动的角度记作γ,则刚体的旋转运动用单位四元数表示为:
13、
14、步骤1.2.3、基于单位四元数,建立n个跟随航天器的姿态运动学方程和动力学方程为:
15、
16、
17、其中为单位四元数,表示坐标系相对于坐标系的姿态;qi,0和qi,v分别是四元数qi的标量部分和矢量部分;是全体单位四元数的集合;表示坐标系相对于坐标系的角速度,并且表示在坐标系下;是第i个跟随航天器的转动惯量;表示第i个跟随航天器的控制输入;是姿态四元数qi的导数;是角速度ωi的导数,即为第i个跟随航天器的角加速度;e(qi)是一个4*3的矩阵;
18、步骤1.2.4、领航航天器的姿态运动学方程为:
19、
20、其中为单位四元数,表示坐标系相对于坐标系的姿态;q0,0和q0,v分别是q0的标量部分和矢量部分;表示坐标系相对于坐标系的角速度,并且表示在坐标系下;是姿态四元数q0的导数;e(q0)是一个4*3的矩阵;
21、步骤1.2.4、领航航天器满足以下假设:
22、假设1:领航航天器的角速度ω0和它的前两阶导数是连续有界的,且存在一个正常数δω0满足这里是角速度ω0二阶导数的无穷范数;
23、步骤2、多航天器系统信息交互网络的设计
24、步骤2.1、用一个有向图表示n+1个主从式多航天器之间的信息交互关系,图中节点集合为这里的节点0代表领航航天器;
25、步骤2.2、对于有向图其每一条边(j,i)∈ε对应一个权值aij,此时,有向图的邻接矩阵定义为是一个(n+1)×(n+1)的矩阵,aij表示矩阵的第i行第j列的元素,当(j,i)∈ε时,aij>0,反之则aij=0,对所有的都有aii=0;有向图的laplacian矩阵定义为其中矩阵是以d0,d1,d2,…,dn为对角元素的对角矩阵,且
26、步骤2.3、定义子图表示跟随航天器之间的信息交互网络,其中子图的邻接矩阵记作aij表示矩阵的第i行第j列的元素;子图的laplacian矩阵记作lij表示矩阵的第i行第j列的元素;
27、步骤2.4、有向图的laplacian矩阵和子图的laplacian之间存在如下关系:
28、
29、其中,向量b=[a10a20…an0]t,矩阵b是以a10,a20,…an0为对角元素的对角矩阵;
30、步骤2.5、针对多航天器系统,将其信息交互网络设计为一棵以领航航天器为根节点的有向树,并根据设计的信息交互网络,确定信息交互网络拓扑图的邻接矩阵与laplacian矩阵
31、步骤3、分布式观测器设计
32、步骤3.1、针对第i个跟随者航天器,将领航者航天器信息q0,ω0,的估计分别记作ηi,ξi,ζi;
33、步骤3.2、对任意的任意两个姿态估计值ηi和ηj之间的误差定义为:
34、
35、其中和分别是的标量部分和矢量部分;ηi,0和ηi,v分别是ηi的标量部分和矢量部分;ηj,0和ηj,v分别是ηj的标量部分和矢量部分;
36、步骤3.3、对任意的定义姿态估计值ηi相对于领航航天器姿态q0的误差为:
37、
38、其中和分别是的标量部分和矢量部分;ηi,0和ηi,v分别是ηi的标量部分和矢量部分;q0,0和q0,v分别是q0的标量部分和矢量部分;
39、步骤3.4、对任意的定义局部姿态估计相对误差eηi、局部角速度估计相对误差eξi和局部角加速度估计相对误差分别为:
40、
41、
42、
43、步骤3.5、利用局部姿态估计相对误差eηi、局部角速度估计相对误差eξi和局部角加速度估计相对误差建立如下分布式观测器:
44、
45、
46、
47、式中ηi,0和ηi,v分别是ηi的标量部分和矢量部分;和分别是ηi,ξi和ζi的导数;μ1,μ2,μ3和μ4是大于0的可调参数;e(ηi)是一个4*3的矩阵;
48、步骤4、仅姿态反馈的抗退绕姿态跟踪控制律设计
49、步骤4.1、姿态跟踪误差模型的建立
50、步骤4.1.1、定义第i个跟随航天器的姿态四元数qi和角速度ωi与分布式观测器输出的估计信号ηi和ξi之间的误差为:
51、
52、
53、式中是ηi的逆,是姿态跟踪误差,是角速度跟踪误差,是旋转矩阵;
54、步骤4.1.2、对姿态跟踪误差和角速度跟踪误差求导,可以推导姿态跟踪误差系统的方程为:
55、
56、
57、上式中,和分别为和的导数;是一个4*3的矩阵;
58、步骤4.2、仅姿态反馈的姿态抗退绕跟踪控制律设计
59、步骤4.2.1、设计如下辅助滤波系统:
60、
61、
62、其中λi是大于0的可调参数,是辅助滤波系统的输出;是引入的辅助变量;是的矢量部分,是一个4*3的矩阵;
63、步骤4.2.2、利用引入的辅助变量和姿态跟踪误差信号设计如下仅姿态反馈的姿态跟踪控制律:
64、
65、式中k1i和k2i是大于0的可调参数;和分别是的标量部分和矢量部分;是的矢量部分;表示的初始值;表示初始值的符号。
66、相比于现有技术,本发明具有如下优点:
67、1、本发明所提出的分布式观测器能够保证姿态四元数的估计值始终保持单位四元数的性质,这一性质确保了分布式观测器设计与姿态跟踪控制律设计满足分离原理。这样已有的姿态跟踪算法能够直接移植到分布式姿态跟踪控制算法中,极大程度上降低了算法设计的难度和理论分析的难度。另外,姿态四元数的估计值始终保持单位四元数符合姿态旋转的物理意义,使得所提出的分布式观测器与实际应用场景更加契合。
68、2、本发明在提出的分布式观测器基础上,考虑跟随航天器无角速度反馈的情况,通过引入辅助滤波系统,设计了仅姿态反馈的抗退绕姿态跟踪控制律,不需要角速度反馈信息,进一步扩大了航天器的使用场景。此外,通过在控制律中引入姿态跟踪误差四元数标量的初始值,保证跟随航天器姿态能够渐近跟踪分布式观测器输出的领航航天器姿态估计值的同时具有抗退绕特性,大大降低了姿态跟踪的时间,减少了燃料的消耗,提高了航天器的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!