无人运载装备协同控制的非凸距离约束凸化方法及系统
本技术属于无人运载装备控制,具体涉及一种无人运载装备协同控制的非凸距离约束凸化方法及系统。
背景技术:
1、当如无人驾驶汽车、无人机及uuv(无人水下航行器)等无人运载装备执行复杂任务时,无人运载装备协同运动控制发挥着非常重要的作用,而其运动控制需要满足距离约束。无人运载装备之间的通信距离有限,若无人运载装备之间的距离超过了通信距离,那么无人运载装备将无法获得其他无人运载装备的状态信息,从而无法保持预设的期望编队,故需要将无人运载装备之间的距离控制在通信距离以内,即通信保持需求。而且,若无人运载装备之间的距离太小,将导致无人运载装备发生碰撞,从而损坏无人运载装备的结构及功能,故需要将无人运载装备之间的距离控制在安全距离以上,即避撞需求。
2、总之,将无人运载装备协同中各装备之间的距离控制在通信距离以内及安全距离以上是非常有必要的。也就是说,无人运载装备编队运动控制过程中需要同时满足通信保持需求及避撞需求。
3、现有技术无法同时实现无人运载装备协同运动过程中的通信保持需求及避撞需求,现有技术在处理该问题的方法主要有势场法及约束法。对于势场法,当无人运载装备的速度相对较高时,无人运载装备的运动会不稳定,从而影响编队的运动控制性能。对于约束法,现有方法是采用无人运载装备的位置构建距离的非凸约束,使得求解满足非凸约束的控制输入的问题是一个非凸优化问题。通常来说,非凸优化问题没有全局最优解,甚至很难找到局部最优解,故很难求解满足非凸优约束的控制输入的全局最优解。
4、现有技术一:
5、auv(自动水下航行器)是uuv的其中一个分支。为了实现auv编队的一致性控制,现有技术一(li,s.,and wang x."finite-time consensus and collision avoidancecontrol algorithms for multiple auvs."automatica 49.11(2013):3359-3367)将各auv所在区域划分为通信区域、保持区域、碰撞区域及避撞区域,并采用势场法设计了通信保持势函数及避撞势函数以将各auv之间的距离控制在通信距离以内及安全距离以上。
6、现有技术一的缺点是采用势场法,当auv速度较高时,auv的运动会极其不稳定,从而严重影响auv协同的运动控制性能。
7、现有技术二:
8、现有技术二(c.liu,q.hu,and t.sun."distributed formation control ofunderactuated ships with connectivity preservation and collision avoidance."ocean engineering 263)充分利用非线性模型预测控制可以处理约束的优势,将usv(无人水面船艇)编队跟踪控制过程中的通信保持及避撞需求转化为具有通信保持约束及避撞约束的优化问题以将各usv之间的距离控制在通信距离以内及安全距离以上。
9、现有技术二的缺点是采用约束法,通信保持约束及避撞约束是通过usv位置构建的非凸距离约束,使得无法求解满足要求的控制输入全局最优解或局部最优解,从而影响usv编队的跟踪控制性能。
技术实现思路
1、本技术实施例的目的是提供一种无人运载装备协同控制的非凸距离约束凸化方法及系统,其将无人运载装备编队运动过程中为满足通信保持及避撞两大需求而基于无人运载装备位置、通信距离及安全距离构建的非凸约束转化为凸约束,为求解满足这两大需求的控制输入的全局最优解提供便利,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本技术是这样实现的:
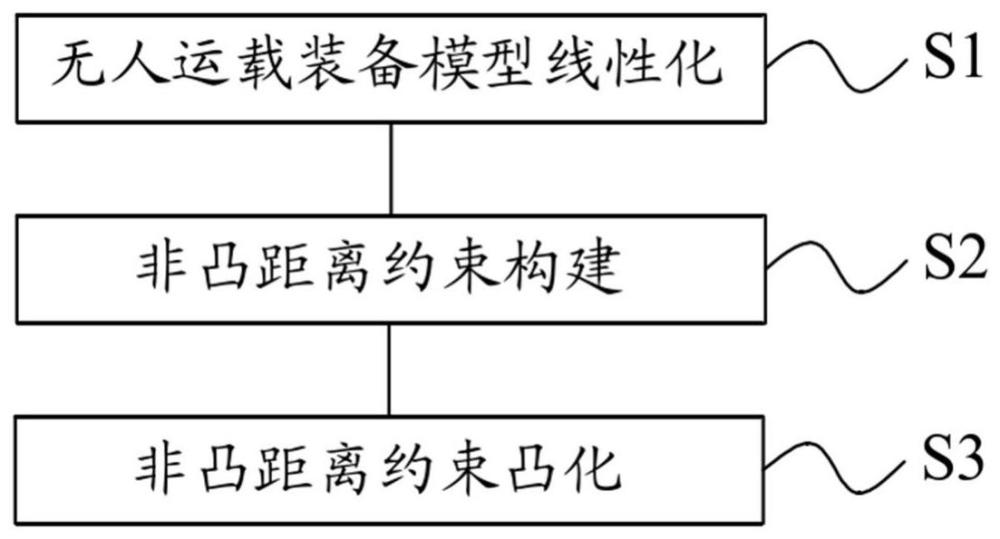
3、本技术提供了一种无人运载装备协同控制的非凸距离约束凸化方法,包括以下步骤:
4、步骤s1、无人运载装备模型线性化,构建无人运载装备编队中无人运载装备的非线性模型,对构建的非线性模型进行雅可比线性化;
5、步骤s2、非凸距离约束构建,根据各无人运载装备的位置、通信距离及安全距离,建立非凸通信保持约束及避撞约束;
6、步骤s3、非凸距离约束凸化,采用区域匹配算法将建立的非凸通信保持约束及避撞约束转化为凸约束。
7、步骤s1中,非线性模型表示为:
8、
9、式中,xi(t)是第i个无人运载装备的状态,τi(t)是控制输入,ai(t)和bi(t)是系数矩阵。
10、作为本发明的一限定,步骤s1中,对构建的非线性模型进行雅可比线性化,具体包括:
11、定义假设的平衡点为(xi(t0),τi(t0)),那么
12、采用雅可比线性化将公式(1)线性化,如下式所示:
13、
14、式中,且a′i及b′i是常量矩阵。
15、作为本发明的一限定,步骤s2中,非凸通信保持约束及避撞约束由下式表示:
16、||f(xi(t)-xj(t))||2≤dcp (3)
17、||f(xi(t)-xj(t))||2≥dca (4)
18、式中,xi(t)及xj(t)分别是无人运载装备编队中编号为分别为i及j的无人运载装备的状态,dcp与dca分别是通信距离及安全距离,f为系数矩阵。
19、作为本发明的一限定,步骤s3中,采用非凸约束凸化算法将建立的非凸通信保持约束及避撞约束转化为凸约束,具体包括:
20、以及分别表示xi(t)与xj(t)的名义值,则及表示为:
21、
22、
23、定义则公式(3)可近似描述如下式(6)所示凸通信保持约束:
24、
25、采用分布式模型预测控制,在预测时域n内的凸通信保持约束表示:
26、
27、
28、
29、其中,是预测时域n内第i个无人运载装备的控制输入序列,并且的取值如下:
30、
31、预测时域n内的凸避撞约束表示为:
32、
33、
34、本技术还提供了一种用于实现所述的方法的无人运载装备协同控制的非凸距离约束凸化系统,包括:
35、无人运载装备模型线性化模块,其用于构建无人运载装备编队中无人运载装备的非线性模型,对构建的非线性模型进行雅可比线性化;
36、非凸距离约束构建模块,其用于根据各无人运载装备的位置、通信距离及安全距离,建立非凸通信保持约束及避撞约束;以及
37、非凸距离约束凸化模块,其用于采用非凸约束凸化算法将建立的非凸通信保持约束及避撞约束转化为凸约束。
38、本技术提出无人运载装备协同运动控制问题中的非凸距离约束转化为凸约束的方法,有利于求解可以使无人运载装备编队中各装备之间的距离同时满足通信保持需求及避撞需求的控制输入全局最优解,从而可以同时实现无人运载装备协同运动过程中的通信保持需求及避撞需求。
- 还没有人留言评论。精彩留言会获得点赞!