龙门架式履带底盘调平控制方法、装置、设备及介质
本技术涉及山地运输,尤其涉及一种龙门架式履带底盘调平控制方法、相应的装置、电子设备及计算机可读存储介质。
背景技术:
1、龙门架式履带底盘在工程机械、农业机械和传送机械等领域得到广泛应用,主要是因为其面压强较小。然而,由于龙门架式履带底盘的结构相对笨重,为追求稳定性,底盘的重心高度设计相对较低。这种设计常常受到底盘搭载平台的限制。由于龙门架式履带底盘工作的地形相对复杂,因此龙门架在运动时很难达到平稳的效果。
2、适应现有技术中由于龙门架式履带底盘工作的地形相对复杂,龙门架在运动时很难达到平稳等问题,本技术人出于解决该问题的考虑作出相应的探索。
技术实现思路
1、本技术的目的在于解决上述问题而提供一种龙门架式履带底盘调平控制方法、相应的装置、电子设备及计算机可读存储介质。
2、为满足本技术的各个目的,本技术采用如下技术方案:
3、适应本技术的目的之一而提出的一种龙门架式履带底盘调平控制方法,包括:
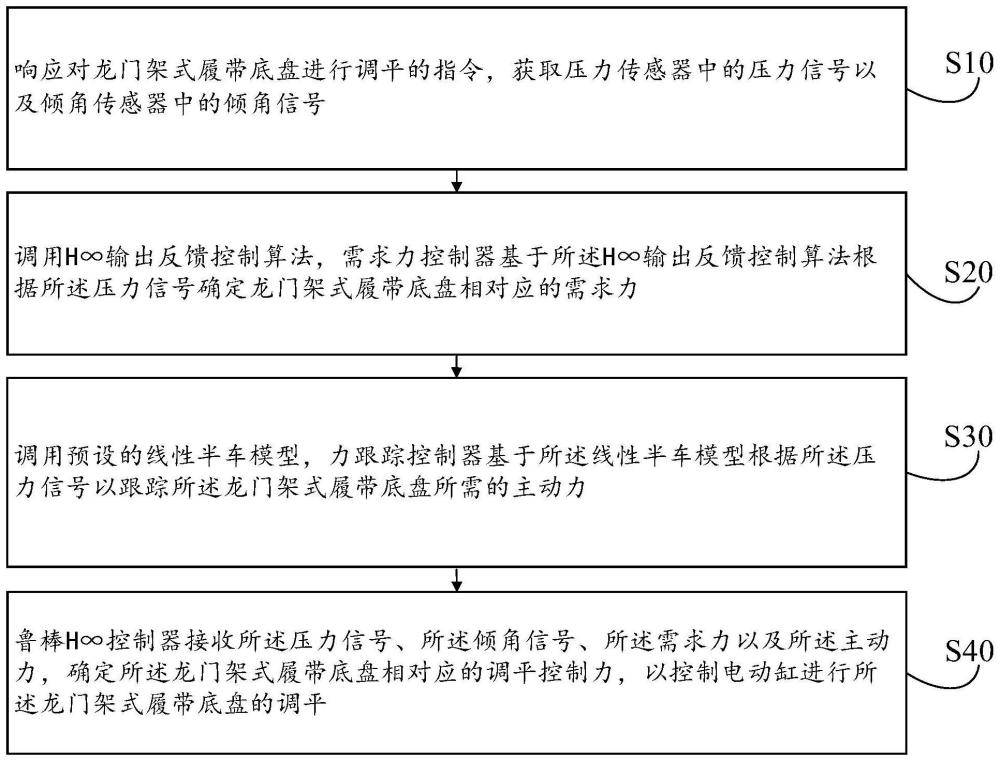
4、响应对龙门架式履带底盘进行调平的指令,获取压力传感器中的压力信号以及倾角传感器中的倾角信号;
5、调用h∞输出反馈控制算法,需求力控制器基于所述h∞输出反馈控制算法根据所述压力信号确定龙门架式履带底盘相对应的需求力;
6、调用预设的线性半车模型,力跟踪控制器基于所述线性半车模型根据所述压力信号以跟踪所述龙门架式履带底盘所需的主动力;
7、鲁棒h∞控制器接收所述压力信号、所述倾角信号、所述需求力以及所述主动力,确定所述龙门架式履带底盘相对应的调平控制力,以控制电动缸进行所述龙门架式履带底盘的调平。
8、可选的,构建线性半车模型的步骤,包括:
9、响应线性半车模型构建指令,确定簧载和非簧载质量的动力学方程以及主动力方程;
10、确定所述状态向量、路面扰动以及控制输入电压,将所述簧载和非簧载质量的动力学方程以及主动力方程相结合,以构建线性半车模型。
11、可选的,所述主动力方程为:
12、fsi=asplsi,
13、其中,plsi是执行机构的负载压力,所述plsi包括:
14、
15、
16、其中,as为电动塞的活塞面积,ps为供应压力,α=4βe/vt,β=αct,vt为电动缸总体积,ct为总活塞泄露系数,βe为有效体积模量,cd为流量系数,ρ为液压流体密度,ω为伺服阀面积梯度,xvi为伺服阀的排量,ui为伺服阀的输入电压,τ为伺服阀动力学的时间常数,kci是转换增益。
17、可选的,所述簧载和非簧载质量的动力学方程为:
18、
19、
20、
21、
22、其中,ms为车身质量,ktf和ktr分别为前后轮垂向刚度,muf和mur分别为前后悬架非簧载质量ip为俯仰转动惯量,ksf和ksr为前后悬架弹簧的刚数,csf和csr为前后悬架减振器的阳配系数,zs为簧载质量垂向运动和俯仰运动的状态向量,zsf和zsr为前后悬架与车身连接处的垂向位移zuf和zur为前后轴非管载质量的垂向位移,a和b为质心到前后轴的距离,fsf和fsr分别为电动缸为前后轴提供的主动力。
23、可选的,获取压力传感器中的压力信号以及倾角传感器中的倾角信号的步骤之后,包括:
24、当车身分别遇到弹跳和俯仰运动时,由f1和f2分别表示前、后悬架支柱的要求力;
25、由执行器产生的控制器的相应力fdsi(i=f,r)分别为fdsf=f1,fdsr=f1和fdsf=f2,fdsr=-f2,当出现耦合运动时,前、后执行器所需的力表示为:
26、fdsf=σ1f1+σ2f2,
27、fdsr=σ1f1-σ2f2,
28、其中,σ1和σ2分别是弹跳和俯仰运动模式的能量贡献率。
29、可选的,据权利要求1任意一项所述的龙门架式履带底盘调平控制方法,其特征在于,确定所述龙门架式履带底盘相对应的调平控制力的步骤,包括:
30、鲁棒h∞控制器相应的控制输出为:
31、
32、
33、其中,λ1,λ2和λ3是对相互冲突的设计要求的加权系数;
34、将鲁棒h∞控制器相应的控制输出方程定义的控制目标描述为状态空间形式,表示为:
35、z1(t)=c1 xp(t)+dww(t)+d1f1(t),
36、z2(t)=c2 xp(t)+dww(t)+d2f2(t),
37、其中,ci,dw和di由状态向量xp(t)、道路扰动w(t)和控制力fi(t)所确定,h∞输出反馈控制抑制道路干扰输入w(t)对控制输出向量zi(t)的最大能量增益,表示为:
38、||hzw(s)||∞=sup(||zi||2/||w||2),
39、其中,η>0为最小化的正值。在有限能量的道路扰动下,||hzw(s)||∞的值越小,悬架性能越好。
40、可选的,控制电动缸进行所述龙门架式履带底盘的调平的步骤,包括如下步骤:
41、响应爬坡指令,获取所述鲁棒h∞控制器所确定的调平控制力;
42、电动缸根据所述调平控制力驱动所述龙门架式履带底盘进行爬坡运动,以完成龙门架式履带底盘的调平控制。
43、适应本技术的另一目的而提供的一种龙门架式履带底盘调平控制装置,包括:
44、信号获取模块,设置为响应对龙门架式履带底盘进行调平的指令,获取压力传感器中的压力信号以及倾角传感器中的倾角信号;
45、需求力确定模块,设置为调用h∞输出反馈控制算法,需求力控制器基于所述h∞输出反馈控制算法根据所述压力信号确定龙门架式履带底盘相对应的需求力;
46、主动力确定模块,设置为调用预设的线性半车模型,力跟踪控制器基于所述线性半车模型根据所述压力信号以跟踪所述龙门架式履带底盘所需的主动力;
47、调平控制模块,设置为鲁棒h∞控制器接收所述压力信号、所述倾角信号、所述需求力以及所述主动力,确定所述龙门架式履带底盘相对应的调平控制力,以控制电动缸进行所述龙门架式履带底盘的调平。
48、适应本技术的另一目的而提供的一种电子设备,包括中央处理器和存储器,所述中央处理器用于调用运行存储于所述存储器中的计算机程序以执行本技术所述龙门架式履带底盘调平控制方法的步骤。
49、适应本技术的另一目的而提供的一种计算机可读存储介质,其以计算机可读指令的形式存储有依据所述龙门架式履带底盘调平控制方法所实现的计算机程序,该计算机程序被计算机调用运行时,执行相应的方法所包括的步骤。
50、相对于现有技术,本技术针对现有技术中由于龙门架式履带底盘工作的地形相对复杂,龙门架在运动时很难达到平稳等问题,本技术能够快速、准确实现对龙门架式履带底盘进行调平控制,使龙门架能够平稳地通过复杂的山地等地形,能够大大提高山地运输效率,显著减少人力物力,有力推动山地农业的进一步发展,为智能化农业打下坚实的理论基础。
- 还没有人留言评论。精彩留言会获得点赞!