一种无人车的控制系统、无人车和云控平台的制作方法
本公开涉及无人驾驶,尤其涉及一种无人车的控制系统、无人车和云控平台。
背景技术:
1、对于封闭/半封闭园区(例如矿山场景),无人驾驶车辆在基本固定的道路行驶,当路面洒水、降雨降雪时路面通常会变得湿滑,而路面湿滑会导致车辆失去控制发生碰撞危险,因而获取路面湿滑状态信息对无人驾驶车辆的安全行驶至关重要。
2、相关技术中,在无人驾驶车辆通过打滑路段时,都需要进行实时判断,而由于存在车辆检测失效的可能,或者打滑检测的实时性要求(如果检测较晚,即使检测到打滑进行安全保护动作仍然可能导致车辆失控),相关技术无法有效减小车辆在湿滑路面失控的风险。
技术实现思路
1、本公开实施例提供了一种无人车的控制系统、无人车和云控平台,用以解决现有的基于自车的打滑判断的方式,无法降低车辆在湿滑路面失控的风险问题。
2、基于上述问题,第一方面,提供一种无人车的控制系统,包括:
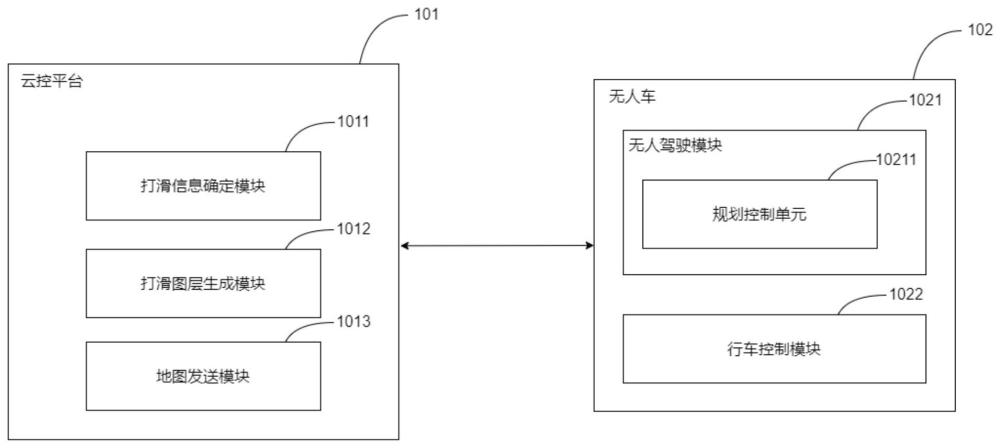
3、云控平台,包括打滑信息确定模块、打滑图层生成模块和地图发送模块,所述打滑信息确定模块用于获取打滑区域的位置信息,所述打滑图层生成模块用于根据所述位置信息在地图中生成所述打滑区域对应的打滑图层,得到目标地图,所述地图发送模块用于将所述目标地图发送给至少一辆无人车;以及
4、所述至少一辆无人车,每辆无人车包括无人驾驶模块和行车控制模块,所述无人驾驶模块包括规划控制单元,所述规划控制单元用于获取所述目标地图,并根据所述目标地图确定行驶策略;所述行车控制模块用于控制所述无人车按照所述行驶策略行驶。
5、结合第一方面,在一种可能的实施方式中,所述打滑信息确定模块还用于确定所述打滑区域对应的第一限速等级;所述打滑图层生成模块用于根据所述位置信息和所述第一限速等级在地图中生成所述打滑区域对应的打滑图层。
6、结合第一方面,在一种可能的实施方式中,所述打滑信息确定模块,还用于根据所述至少一辆无人车的行驶情况对所述第一限速等级进行更新,并将限速等级更新后的地图发送给所述至少一辆无人车。
7、结合第一方面,在一种可能的实施方式中,所述行驶策略包括:按照所述第一限速等级对应的限速范围,降速通过所述打滑区域;或者,绕过所述打滑区域行驶。
8、结合第一方面,在一种可能的实施方式中,所述规划控制单元包括全局规划单元和局部规划单元;其中,所述全局规划单元,用于根据所述目标地图,为全局轨迹中的打滑区域设置限速;所述局部规划单元,用于根据设置限速的全局轨迹,确定设置有限速的局部参考轨迹,并将所述设置有限速的局部参考轨迹发送给所述行车控制模块;所述行车控制模块,用于在控制所述无人车按照所述设置有限速的局部参考轨迹行驶并检测到所述无人车行驶到所述打滑区域之前,将所述无人车的速度控制在所述第一限速等级对应的限速范围内,并控制所述无人车行驶通过所述打滑区域。
9、结合第一方面,在一种可能的实施方式中,所述规划控制单元包括全局规划单元和局部规划单元,其中,所述全局规划单元,用于根据所述目标地图,对全局轨迹进行调整,得到调整后的全局轨迹;所述局部规划单元,用于根据所述调整后的全局轨迹,确定局部参考轨迹,所述局部参考轨迹不经过所述打滑区域;所述行车控制模块,用于控制所述无人车按照所述局部参考轨迹行驶。
10、结合第一方面,在一种可能的实施方式中,所述系统还包括:第一无人车,包括打滑检测模块,所述打滑检测模块用于在所述第一无人车发生打滑的情况下确定打滑区域的位置信息,并将所述位置信息发送给所述打滑信息确定模块。
11、结合第一方面,在一种可能的实施方式中,所述第一无人车还包括限速等级确定模块,所述限速等级确定模块用于获取所述第一无人车在发生打滑时的打滑特征参数,根据所述打滑特征参数确定所述第一限速等级,并将所述第一限速等级发送给所述打滑信息确定模块;或者,所述第一无人车还包括打滑特征上报模块,用于获取所述第一无人车在发生打滑时的打滑特征参数,并将所述打滑特征参数发送给所述打滑信息确定模块,其中,所述打滑信息确定模块用于根据所述打滑特征参数确定所述第一限速等级;或者所述打滑信息确定模块,用于在所述打滑检测模块将所述位置信息发送给所述打滑信息确定模块之后,将对应打滑区域的限速等级在当前限速等级的基础上升高第一预设数量个等级,得到所述第一限速等级;所述第一限速等级为多个预设打滑限速等级之一,且打滑限速等级越高表征对应打滑区域设置的限速越低。
12、结合第一方面,在一种可能的实施方式中,所述限速等级确定模块,还用于获取管理员输入的打滑信息,所述打滑信息包括所述打滑区域的位置信息和/或所述第一限速等级。
13、结合第一方面,在一种可能的实施方式中,所述打滑信息确定模块还用于在将所述打滑区域对应的限速等级确定为第一限速等级之后,执行以下步骤:
14、步骤1,启动计时器计时,并在计时时间达到第一预设时长后,将所述打滑区域限速等级降低第二预设数量个等级;步骤2,判断所述打滑区域当前对应的限速等级是否表征取消打滑限速,若否,则将当前时间作为计时起点,并返回执行所述步骤1,直到得到的最新的打滑区域限速等级表征取消打滑限速;或步骤3,对经过所述打滑区域且未发生打滑的无人车进行计数,并在计数数量达到第一数量后,将所述打滑区域限速等级降低第三预设数量个等级;步骤4,判断所述打滑区域当前对应的限速等级是否表征取消打滑限速,若否,则将当前时间作为计时起点,并返回执行所述步骤3,直到得到的最新的打滑区域限速等级表征取消打滑限速;或步骤5,启动计时器计时,并对经过所述打滑区域且未发生打滑的无人车进行计数;在计时时间达到第二预设时长且无人车计数数量达到第二数量后,将所述打滑区域限速等级降低第四预设数量个等级;步骤6,判断所述打滑区域当前对应的限速等级是否表征取消打滑限速,若否,则将当前时间作为计时起点,并返回执行所述步骤5,直到得到的最新的打滑区域限速等级表征取消打滑限速。
15、结合第一方面,在一种可能的实施方式中,所述限速等级确定模块,还用于在所述行驶策略包括绕过所述打滑区域行驶且所述控制模块控制所述无人车开始绕行后,执行以下步骤:步骤7,启动计时器对绕行时间进行计时,并在绕行时间达到预设绕行时长后,将所述打滑区域限速等级降低第五预设数量个等级;步骤8,判断所述打滑区域当前对应的限速等级是否表征取消打滑限速,若否,则将当前时间作为计时起点,并返回执行所述步骤7,直到得到的最新的打滑区域限速等级表征取消打滑限速。
16、第二方面,提供一种无人车,包括:无人驾驶模块和行车控制模块;所述无人驾驶模块包括规划控制单元,所述规划控制单元用于获取目标地图,并根据所述目标地图确定行驶策略;所述行车控制模块用于控制所述无人车按照所述行驶策略行驶;其中,所述目标地图包括打滑图层,所述打滑图层为根据打滑区域的位置信息生成。
17、第三方面,提供一种云控平台,包括:打滑信息确定模块、打滑图层生成模块和地图发送模块;
18、所述打滑信息确定模块用于获取打滑区域的位置信息;所述打滑图层生成模块用于根据所述位置信息在地图中生成所述打滑区域对应的打滑图层,得到目标地图;所述地图发送模块用于将所述目标地图发送给至少一辆无人车,以使所述至少一辆无人车分别根据所述目标地图确定行驶策略并按照所述行驶策略行驶。
19、本公开实施例的有益效果包括:
20、本公开实施例提供的一种无人车的控制系统、无人车和云控平台,包括:云控平台,包括打滑信息确定模块、打滑图层生成模块和地图发送模块,打滑信息确定模块用于获取打滑区域的位置信息,打滑图层生成模块用于根据位置信息在地图中生成该打滑区域对应的打滑图层,得到目标地图,地图发送模块用于将目标地图发送给至少一辆无人车;以及至少一辆无人车,每辆无人车包括无人驾驶模块和行车控制模块,无人驾驶模块包括规划控制单元,规划控制单元用于获取目标地图,并根据目标地图确定行驶策略;行车控制模块用于控制无人车按照该行驶策略行驶。本公开实施例中,可以通过云控平台获取打滑区域的位置信息,并基于该位置信息生成具有对应打滑图层的目标地图,无人车可以获取该目标地图,并根据该目标地图制定行驶策略,按照该行驶策略行驶,与现有技术中只能依靠单车在行驶到打滑区域时进行实时判断相比,无人车能够预先获取到具有对应打滑图层的目标地图,并根据该目标地图制定行驶策略,从而降低了无人车在湿滑路面失控的风险,提升了无人车的行车安全性和行驶效率。
- 还没有人留言评论。精彩留言会获得点赞!