基于移动闭塞-领航跟随的无人车跟驰控制方法及装置
本发明涉及自动驾驶与智能交通,具体涉及一种基于移动闭塞-领航跟随的无人车跟驰控制方法及装置。
背景技术:
1、领航跟随法由于结构简单可靠的优点,在无人货车编队控制中受到广泛的应用,但在兼顾行驶安全和运输效率的方面存在一定的不足。由于该方法跟驰车的目标点是领航车的尾部,这一结构会增加无人车跟驰系统发生追尾的概率;其次是设置的常数跟驰距离往往会较大,在车辆低速运行时仍然保持较大的跟驰距离会限制车辆的通行效率。而现有广为实用的滑模控制方法存在抖振、控制精度较低等问题,因此,需要针对编队建模和控制算法设计进行研究。
技术实现思路
1、本发明的目的在于提供一种基于移动闭塞-领航跟随的无人车跟驰控制方法及装置,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、第一方面,本发明提供一种基于移动闭塞-领航跟随的无人车跟驰控制方法,包括:
4、实时检测前方授权点的速度和角速度;
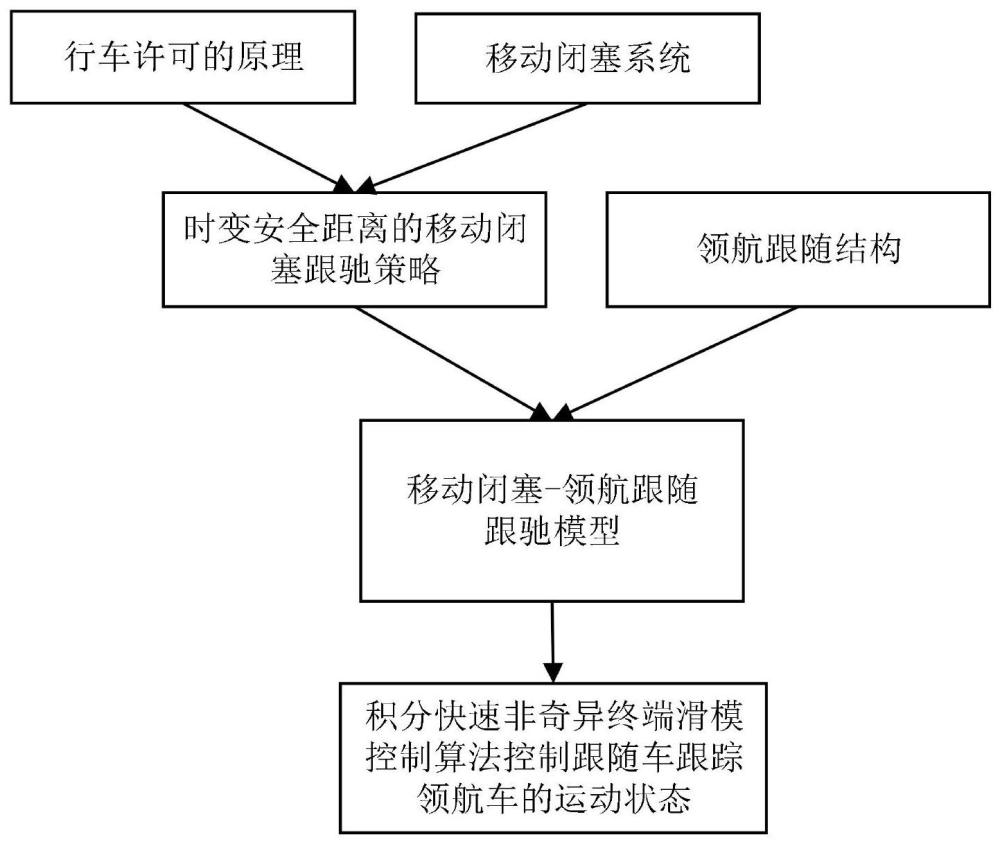
5、基于检测前方授权点的速度和角速度,建立领航者leader、跟随者follower和授权点的移动闭塞-领航跟随跟驰模型;
6、将移动闭塞-领航跟随跟驰模型中系统的被控量进行降维处理;
7、根据输入量计算滑模控制律的输出量;
8、输入量是前方授权点的线速度、角速度和当前车辆与前方车辆的纵向误差、横向误差以及角度误差,输出量是当前车辆的线速度和角速度,两个变量再作用于无人车辆跟驰运动学模型,形成一个完整的闭环管理系统。
9、可选的,由于车车跟驰误差分量中包含了纵向误差与角度误差,通过阿克曼转向几何原理找到二者之间的关系,实现对系统的降维,建立移动闭塞-领航跟随跟驰模型。
10、可选的,包括:v为车辆的实际运行速度,vf为后轮径向的线速度,vs为横移速度,θ为前轮的偏角,取左偏移为正向,l为车辆轴距的一半,则:
11、
12、考虑横向误差可以通过调整横向行驶速度进行消除,纵向误差可以通过调整纵向横移速度来消除,角度误差可以通过调整横摆角速度进行消除,因此结合阿克曼转向几何原理,对三个被控误差分量进行降维处理。
13、可选的,横移速度与偏航角速度满足:
14、vs=ω·l
15、其中,vs为横移速度,ω为车辆横摆角速度,l为车辆轴距的一半;
16、此时,对于follower而言仅存在两个可输出的控制量,即为follower的线速度与角速度,得到移动闭塞-领航跟随跟驰模型:
17、
18、
19、可选的,积分快速非奇异终端滑模控制算法作为控制模型的算法,构造的积分快速非奇异终端滑模面为:
20、
21、其中,且aij>0(i,j=1,2),1<p/q<2,且p,q均为正奇数;
22、则,
23、
24、
25、为了有效地抑制抖振,选用饱和函数作为趋近律进行控制器的设计;通过饱和函数本身存在“边界层”的特点,在设计的边界层内部保持连续的状态反馈进行控制,有效地抑制由于切换函数带来的抖振。
26、可选的,饱和函数为:
27、
28、其中,δ为边界层;
29、则,快速非奇异终端滑模控制器为:
30、
31、其中,η1>0,η2>0。
32、第二方面,本发明提供一种基于移动闭塞-领航跟随的无人车跟驰控制装置,包括:
33、传感器模块,用于实时检测前方授权点的速度和角速度;
34、模型建立模块,用于建立leader、follower和授权点的数学模型;
35、模型转化模块,用于将系统的被控量进行降维处理;
36、控制器模块,根据输入量计算滑模控制律的输出量;
37、管理模块,输入量是前方授权点的线速度、角速度和当前车辆与前方车辆的纵向误差、横向误差以及角度误差,输出量是当前车辆的线速度和角速度,两个变量再作用于无人车辆跟驰运动学模型,形成一个完整的闭环管理系统。
38、第三方面,本发明提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如第一方面所述的基于移动闭塞-领航跟随的无人车跟驰控制方法。
39、第四方面,本发明提供一种计算机设备,包括存储器和处理器,所述处理器和所述存储器相互通信,所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令执行如第一方面所述的基于移动闭塞-领航跟随的无人车跟驰控制方法。
40、第五方面,本发明提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如第一方面所述的基于移动闭塞-领航跟随的无人车跟驰控制方法的指令。
41、本发明有益效果:提出了移动闭塞-领航跟随模型,确保跟驰安全性的同时,兼顾了跟驰运行效率,提出了设计了改进的积分快速非奇异终端滑模面,并采用饱和函数作为切换函数削弱抖振影响,可以有效实现无人车稳定精准跟驰控制。
技术特征:
1.一种基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,包括:
2.根据权利要求1所述的基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,由于车车跟驰误差分量中包含了纵向误差与角度误差,通过阿克曼转向几何原理找到二者之间的关系,实现对系统的降维,建立移动闭塞-领航跟随跟驰模型。
3.根据权利要求2所述的基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,包括:v为车辆的实际运行速度,vf为后轮径向的线速度,vs为横移速度,θ为前轮的偏角,取左偏移为正向,l为车辆轴距的一半,则:
4.根据权利要求3所述的基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,横移速度与偏航角速度满足:
5.根据权利要求4所述的基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,积分快速非奇异终端滑模控制算法作为控制模型的算法,构造的积分快速非奇异终端滑模面为:
6.根据权利要求5所述的基于移动闭塞-领航跟随的无人车跟驰控制方法,其特征在于,饱和函数为:
7.一种基于移动闭塞-领航跟随的无人车跟驰控制装置,其特征在于,包括:
8.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如权利要求1-6任一项所述的基于移动闭塞-领航跟随的无人车跟驰控制方法。
9.一种计算机设备,其特征在于,包括存储器和处理器,所述处理器和所述存储器相互通信,所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令执行如权利要求1-6任一项所述的基于移动闭塞-领航跟随的无人车跟驰控制方法。
10.一种电子设备,其特征在于,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如权利要求1-6任一项所述的基于移动闭塞-领航跟随的无人车跟驰控制方法的指令。
技术总结
本发明提供一种基于移动闭塞‑领航跟随的无人车跟驰控制方法及装置,属于自动驾驶及智能交通技术领域,基于列车速度监督控制中移动闭塞安全信号控制模式,建立了面向安全的无人车跟驰移动闭塞‑领航跟随运动学模型;设计了积分快速非奇异终端滑模算法作为跟驰控制算法,构成控制器模块,这一控制器在传统滑模控制器的基础上进一步提高了控制精度。本发明提出了移动闭塞‑领航跟随模型,确保跟驰安全性的同时,兼顾了跟驰运行效率,提出了设计了改进的积分快速非奇异终端滑模面,并采用饱和函数作为切换函数削弱抖振影响,可以有效实现无人车稳定精准跟驰控制。
技术研发人员:李润梅,钟哲睿
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!