一种二自由度直升机的鲁棒性固定时间滑模姿态控制方法
本发明涉及自动控制,具体涉及一种二自由度直升机的鲁棒性固定时间滑模姿态控制方法。
背景技术:
1、近年来,无人机(uav)技术的飞速发展引起了广泛关注,其中直升机型无人机在物资运输、救援行动和探测任务等领域得到了广泛应用。然而,由于直升机系统的高度非线性和多输入多输出(mimo)特性,以及涉及复杂的动力学建模和耦合效应,其控制变得相当具有挑战性。同时,直升机系统的一些关键参数难以准确测量,因此对控制器的鲁棒性和抗干扰性提出了更高要求。为此,迫切需要设计出更为先进的控制技术来应对这些挑战。在直升机系统控制的研究中,已经提出了多种技术,如pid控制、最优跟踪控制、线性二次调节器(lqr)控制和滑模控制等。在这些技术中,滑模控制在提高鲁棒性和减少抖振方面发挥了重要作用,为直升机的稳定飞行提供了有效手段。
2、在实际应用和理论发展的推动下,为了满足直升机更快速度稳定,更好效果运行,直升机系统的稳定收敛时间是研究人员必须首先探索和关注的一个非常重要的问题。为了确保直升机系统能够满足固定时间规则下的稳定性,在设计控制系统时必须考虑固定时间稳定性,才能在实际背景下制定切实可行的策略。作为控制直升机系统的有效方法,与有限时间收敛相比,固定时间控制具有更短的收敛时间和更好的鲁棒性,受到了广泛的研究关注。固定时间控制作为有限时间控制的扩展方法,由于稳定时间不受系统初始状态的影响仅由可调参数决定,因此固定时间控制在实际应用中受到广泛关注从而迅速发展。
3、强化学习(rl)是一种根据环境信息进行训练的学习方法,专注于反馈、奖励或惩罚而不是错误信号。由于其出色的在线学习能力,强化学习在实际应用中得到了广泛的应用。然而,强化学习是一个渐进的学习过程,不可避免地需要大量的时间进行训练。上述问题亟待解决,为此,提出一种二自由度直升机的鲁棒性固定时间滑模姿态控制方法。
技术实现思路
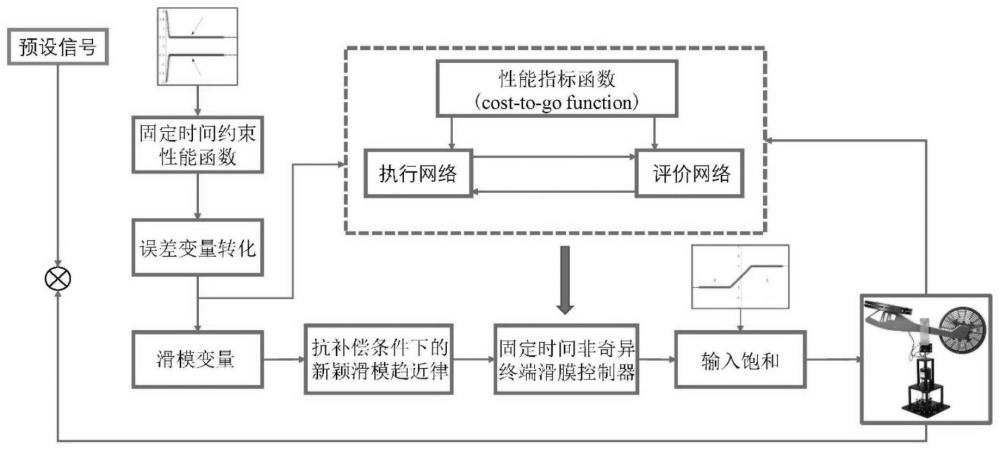
1、本发明所要解决的技术问题在于:如何解决现有无人机控制方法中应用强化学习方法需要大量时间进行稳定的问题,提供了一种二自由度直升机的鲁棒性固定时间滑模姿态控制方法,本方法基于执行-评价神经网络框架,不仅能优化成本函数,还能设计出符合要求的参考信号,从而获得良好的动、稳态性能。
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
3、s1:建立二自由度直升机控制系统的参考模型并设定原始跟踪误差;
4、s2:设计输入饱和与预测性能函数,采用预测性能函数来限制原始跟踪误差,并利用误差变换方法,定义变换误差,在设计控制器时利用变换误差代替原始跟踪误差;
5、s3:设计固定时间非奇异终端变结构滑模动态面、执行-评价神经网络,并设计滑模趋近律;
6、s4:基于固定时间非奇异终端变结构滑模动态面、执行-评价神经网络设计控制器,并引入滑模趋近律,得到固定时间非奇异终端变结构滑模控制器;
7、s5:利用固定时间非奇异终端变结构滑模控制器对二自由度直升机控制系统进行姿态控制,能够在给定的收敛时间范围内跟踪预设参考信号。
8、更进一步地,在所述步骤s1中,二自由度直升机控制系统的参考模型如下:
9、
10、
11、其中,θ、ψ、为二自由度直升机控制系统的状态变量,分别表示二自由度直升机控制系统的俯仰角、偏航角、俯仰角速度、偏航角速度,dp为俯仰的粘性摩擦常数;dy为偏航的粘性摩擦常数;jp为俯仰轴转动惯量;jy为偏航轴转动惯量;kpp为从俯仰轴作用于俯仰轴的推力扭矩增益;kpy为从偏航轴作用于俯仰轴的推力扭矩增益;kyp为从俯仰轴作用于偏航轴的推力扭矩增益;kyy为从偏航轴作用于偏航轴的推力扭矩增益;g为重力加速度;lcm为质心距机身固定架原点的距离;m为二自由度直升机的质量;τp、τy为二自由度直升机控制系统的控制输入。
12、更进一步地,在所述步骤s1中,设定原始跟踪误差的过程如下:
13、s11:设两个变量x1和x2分别表示为x1=[θ,ψ]t,
14、s12:定义引导信号x1d=[θd,ψd]t,将控制输入τ表示为τ=[τp,τy]t;
15、s13:将原始跟踪误差动态设定如下:
16、
17、
18、其中,e1=x1-x1d=[e1θ,e1ψ]t、表示对应的位置跟踪误差、速度跟踪误差;函数表示为d(t)是外部扰动扭矩,其是一种平滑连续函数,具有正上界,使得d(t)≤dmax(t);
19、其中,以上函数中的基本方程被定义为:
20、
21、
22、
23、
24、其中,e1θ表示俯仰角方向的位置跟踪误差,e1ψ表示偏航角方向的位置跟踪误差,e2θ表示俯仰角方向的角速度跟踪误差,e2ψ表示偏航角方向的角速度跟踪误差,表示二自由度直升机控制系统的期望角加速度。
25、更进一步地,在所述步骤s2中,设计输入饱和与预测性能函数的过程如下:
26、s21:二自由度直升机受到输入饱和影响,约束条件如下:
27、
28、其中,τmin和τmax表示控制输入的已知极限饱和值;并且τ=τ0+τu,τ0是系统的等效控制器;τu表示控制器未知部分,其由下列函数定义:
29、
30、s22:二自由度直升机受到预测性能函数影响,表示为如下形式:
31、-ωi<e1i<ωi
32、其中,ω为固定时间规则下的预测性能函数,表示如下:
33、
34、其中,ω0、ω∞分别表示固定时间规则下的预测性能函数的初始值与终值;t表示可定义的预设时间。
35、更进一步地,在所述步骤s2中,定义变换误差的过程如下:
36、s23:通过坐标变换得到:
37、
38、其中,与
39、s24:根据上式,将误差变量进行转化并整合如上的每一个子状态变量,得到变换误差如下:
40、
41、
42、其中,z1=[z11,z12,...,z1i]t,z2=[z21,z22,...,z2i]t,γ=[γ1,γ2,..,γi]t。
43、更进一步地,在所述步骤s3中,设计的固定时间非奇异终端变结构滑模动态面如下:
44、s=z2i+aγ1i(z1i)+bγ2i(z1i)
45、
46、
47、其中,s=[s1,s2]t,z1i=[z1θ,z1ψ]t,z2i=[z2θ,z2ψ]t,a>0,b>0,∈为正常数,
48、更进一步地,在所述步骤s3中,设计的滑模趋近律如下:
49、
50、
51、其中,as>0,bs>0,κξ是一个常数矩阵,aξ>0,bξ>0,ξ表示为一个抗饱和函数,其更新率用来表示,sigδ(x)表示矩阵[|x1|δsign(x1),|x2|δsign(x2),…,|xn|δsign(xn)]t,sign(x)表示矩阵[sign(x1),sign(x2),…,sign(xn)]t。
52、更进一步地,在所述步骤s3中,执行-评价神经网络的具体设计过程如下:
53、s31:定义评价神经网络来预测长期成本函数,并确定评价神经网络的更新规律;
54、s32:接着定义执行神经网络及误差,并确定执行神经网络的更新规律;
55、在所述步骤s31中,具体处理过程如下:
56、s311:定义一个评价神经网络来预测长期成本函数,如下所示:
57、
58、其中,是h(t)的近似值;是估计值的更新率,表示权重向量wc的最优值,ψc表示评价神经网络的基隶属度函数,σc表示评价神经网络的一个有界的估计误差,表示对权重向量wc的估计值;
59、s312:在梯度下降策略的支持下,将评价神经网络的更新规律表示如下:
60、
61、其中,γc表示评价神经网络的学习率,wc表示评价神经网络的权重向量,表示长期成本函数的逼近误差;表示瞬时成本函数,其中d、r均为正定矩阵;
62、s313:将更新规律进一步推导如下:
63、
64、其中,λc表示由z1、z2组成的函数;
65、s314:基于参数投影策略,将权重向量wc设计为有界,然后,将更新规律重置如下:
66、
67、其中,表示为权重向量wc的均值;为在参数投影策略中使用的矢量微分算符;
68、在所述步骤s32中,具体处理过程如下:
69、s321:定义执行神经网络,如下所示:
70、
71、其中,表示权重向量wai的最优值,表示权重向量wai的估计值,ψai表示执行神经网络的基隶属度函数,执行神经网络的输入向量为φi=[z1i,z2i]t;
72、s322:将执行神经网络的误差定义为:
73、
74、其中,ho代表最优长期成本函数,ζ为正常数,代表对长期成本函数的估计值;
75、s323:在梯度下降策略的支持下,将执行神经网络的更新规律表示如下:
76、
77、其中,ea=ln[cosh(σa(t))],γa表示执行神经网络的学习率,λai表示由φi组成的函数,wai表示执行神经网络的权重向量;
78、s324:基于参数投影策略,将权重向量wai设计为有界,然后,将更新规律重置如下:
79、
80、其中,表示为权重向量wai的均值。
81、更进一步地,在所述步骤s4中,固定时间非奇异终端变结构滑模控制器如下:
82、
83、其中,表示对实际二自由度直升机中各种不确定性d(t)的近似,wai和ψan分别表示权重向量和用高斯函数表达的基隶属度函数,i=1,2,…,n;dmax表示为不确定性d(t)的上确界。
84、本发明相比现有技术具有以下优点:
85、1、在固定时间内完成状态的收敛,为应用场景提供了明显的时间效率优势,这不仅加速了系统的响应速度,也提升了系统性能,特别适用于需要迅速调整的直升机实时控制任务。
86、2、滑模趋近律的引入不仅强化了系统的鲁棒性,还使系统更能适应外部干扰和参数波动。这使得固定时间滑模控制器在复杂且变化多端的工程环境中表现出色,确保直升机系统在各种条件下的可靠性。
87、3、采用基于滑模趋近律的控制器对直升机系统的超调和震荡有明显的抑制效果。通过精心设计滑模动态面,能够有效地降低系直升机控制系统的振荡幅度,使得直升机系统在变化和不确定性的情况下更为稳定。
88、4、固定时间非奇异终端滑模控制器注重在固定时间内实现非奇异状态,避免了直升机控制系统可能面临的奇异性问题,这种设计确保了直升机控制系统的稳定性,降低了系统运行中的异常风险。
89、5、由于控制器对直升机系统模型不准确性和参数变化具有较强适应性,因此在实际工程应用中更具可行性,这种广泛适应性使得固定时间滑模控制器在面对复杂多变的工程场景时表现突出,仿真结果验证了本发明所提出的控制效果是有效的。
- 还没有人留言评论。精彩留言会获得点赞!