无人机轨迹规划方法、装置、设备及存储介质与流程
本发明涉及无人机,尤其涉及无人机轨迹规划方法、装置、设备及存储介质。
背景技术:
1、自主无人机因其高敏捷性、低成本以及可扩展性而受到越来越多的关注,并被广泛应用于许多领域,如搜救、自主导航与探索,但是在实际情况中,自主无人机智能在悬停条件附近低速飞行,虽然自主无人机能够自主感知、定位、规划和控制,但是还是无法在复杂环境中飞行,而造成上述缺陷最本质的原因是在复杂环境中规划路径的准确性较低。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种无人机轨迹规划方法、装置、设备及存储介质,旨在解决现有技术规划运动轨迹的准确性较低的技术问题。
2、为实现上述目的,本发明提供了一种无人机轨迹规划方法,所述无人机轨迹规划方法包括以下步骤:
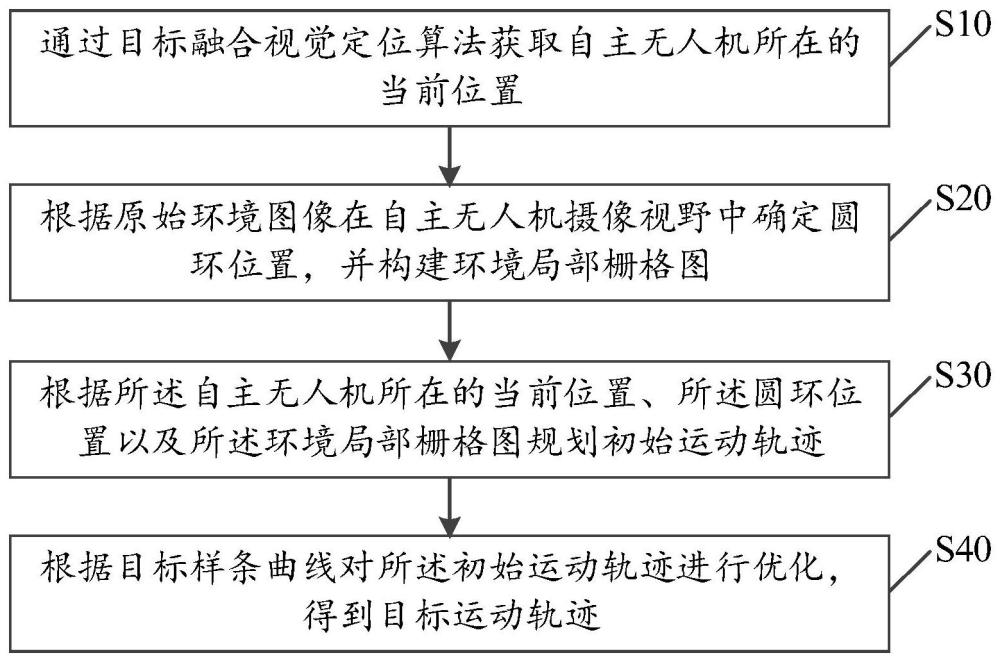
3、通过目标融合视觉定位算法获取自主无人机所在的当前位置;
4、根据原始环境图像在自主无人机摄像视野中确定圆环位置,并构建环境局部栅格图;
5、根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹;
6、根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹。
7、可选地,所述通过目标融合视觉定位算法获取自主无人机所在的当前位置,包括:
8、获取初始视觉定位算法和imu定位算法;
9、通过目标定位算法融合策略对所述初始视觉定位算法和所述imu定位算法进行融合,得到目标融合视觉定位算法;
10、获取自主无人机运动的环境类型;
11、在所述环境类型为极端环境类型时,通过所述目标融合视觉定位算法定位所述自主无人机所在的当前位置。
12、可选地,所述根据原始环境图像在自主无人机摄像视野中确定圆环位置,包括:
13、通过高斯滤波策略对所述原始环境图像进行去噪;
14、通过所述高斯滤波策略对去噪后的原始环境图像进行去模糊;
15、提取去模糊后的原始环境图像的色域;
16、根据所述色域对所述去模糊后的原始环境图像进行滤波;
17、根据滤波后的原始环境图像在自主无人机摄像视野中确定圆环位置。
18、可选地,所述根据滤波后的原始环境图像在自主无人机摄像视野中确定圆环位置,包括:
19、对滤波后的原始环境图像进行霍夫圆检测,并从霍夫圆检测结果中提取圆图像;
20、分别计算所述圆图像的中心坐标和圆图像的平面在局部坐标系中的法向量;
21、获取所述圆图像的先验维度;
22、基于所述先验维度根据颜色信息和深度信息对圆图像进行滤波,得到门坐标和门方向;
23、根据所述中心坐标、法向量、门坐标以及门方向在自主无人机摄像视野中确定圆环位置。
24、可选地,所述构建环境局部栅格图,包括:
25、根据占据栅格地图将路径规划区域的三维空间划分为统一栅格空间;
26、设置系列观察结果;
27、根据所述系列观察结果确定所述统一栅格空间中体素网格的被占用概率和空闲概率;
28、根据所述被占用概率和所述空闲概率定义对数置信度、逆观测参数以及先验概率;
29、基于所述统一栅格空间根据所述对数置信度、所述逆观测参数以及所述先验概率构建环境局部栅格图。
30、可选地,所述根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹,包括:
31、根据所述圆环位置确定所述自主无人机到达的当前节点;
32、在采用目标优先搜索算法根据所述环境局部栅格图搜索至目标位置点时,按照相反顺序搜索所述当前节点的父节点;
33、确定所述父节点与所述自主无人机所在的当前位置对应节点之间的视觉关系;
34、在所述视觉关系为目标视觉关系时,将所述当前节点添加至路径集合;
35、以所述当前节点为新的起点继续按照相反顺序进行遍历,直至所述当前节点为目标位置点,并将目标位置点添加至路径集合;
36、根据所述路径集合中的各点规划初始运动轨迹。
37、可选地,所述根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹,包括:
38、根据目标样条曲线生成参考轨迹;
39、确定所述初始运动轨迹的可优化控制点;
40、根据所述初始运动轨迹和所述可优化控制点确定优化平滑度维度、碰撞维度以及可行性代价维度;
41、分别设置所述优化平滑度维度、所述碰撞维度以及所述可行性代价维度的权重;
42、根据所述优化平滑度维度、所述碰撞维度、所述可行性代价维度以及所述权重生成轨迹优化策略;
43、根据所述轨迹优化策略对所述初始运动轨迹进行优化,得到目标运动轨迹。
44、此外,为实现上述目的,本发明还提出一种无人机轨迹规划装置,所述无人机轨迹规划装置包括:
45、获取模块,用于通过目标融合视觉定位算法获取自主无人机所在的当前位置;
46、确定模块,用于根据原始环境图像在自主无人机摄像视野中确定圆环位置,并根据原始环境图像构建环境局部栅格图;
47、规划模块,用于根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹;
48、优化模块,用于根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹。
49、此外,为实现上述目的,本发明还提出一种无人机轨迹规划设备,所述无人机轨迹规划设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人机轨迹规划程序,所述无人机轨迹规划程序配置为实现如上文所述的无人机轨迹规划方法。
50、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有无人机轨迹规划程序,所述无人机轨迹规划程序被处理器执行时实现如上文所述的无人机轨迹规划方法。
51、本发明提出的无人机轨迹规划方法,通过目标融合视觉定位算法获取自主无人机所在的当前位置;根据原始环境图像在自主无人机摄像视野中确定圆环位置,并根据原始环境图像构建环境局部栅格图;根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹;根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹;通过上述方式,利用目标融合视觉定位算法获取在各种环境下自主无人机所在的当前位置,然后确定圆环位置以及构建环境局部栅格图,再利用目标样条曲线优化规划的初始运动轨迹,从而能够有效提高规划目标运动轨迹的准确性。
技术特征:
1.一种无人机轨迹规划方法,其特征在于,所述无人机轨迹规划方法包括以下步骤:
2.如权利要求1所述的无人机轨迹规划方法,其特征在于,所述通过目标融合视觉定位算法获取自主无人机所在的当前位置,包括:
3.如权利要求1所述的无人机轨迹规划方法,其特征在于,所述根据原始环境图像在自主无人机摄像视野中确定圆环位置,包括:
4.如权利要求3所述的无人机轨迹规划方法,其特征在于,所述根据滤波后的原始环境图像在自主无人机摄像视野中确定圆环位置,包括:
5.如权利要求1所述的无人机轨迹规划方法,其特征在于,所述构建环境局部栅格图,包括:
6.如权利要求1所述的无人机轨迹规划方法,其特征在于,所述根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹,包括:
7.如权利要求1至6中任一项所述的无人机轨迹规划方法,其特征在于,所述根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹,包括:
8.一种无人机轨迹规划装置,其特征在于,所述无人机轨迹规划装置包括:
9.一种无人机轨迹规划设备,其特征在于,所述无人机轨迹规划设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人机轨迹规划程序,所述无人机轨迹规划程序配置有实现如权利要求1至7中任一项所述的无人机轨迹规划方法。
10.一种存储介质,其特征在于,所述存储介质上存储有无人机轨迹规划程序,所述无人机轨迹规划程序被处理器执行时实现如权利要求1至7中任一项所述的无人机轨迹规划方法。
技术总结
本发明涉及无人机技术领域,公开了一种无人机轨迹规划方法、装置、设备及存储介质,所述方法包括:通过目标融合视觉定位算法获取自主无人机所在的当前位置;根据原始环境图像在自主无人机摄像视野中确定圆环位置,并根据原始环境图像构建环境局部栅格图;根据所述自主无人机所在的当前位置、所述圆环位置以及所述环境局部栅格图规划初始运动轨迹;根据目标样条曲线对所述初始运动轨迹进行优化,得到目标运动轨迹;通过上述方式,利用目标融合视觉定位算法获取在各种环境下自主无人机所在的当前位置,然后确定圆环位置以及构建环境局部栅格图,再利用目标样条曲线优化规划的初始运动轨迹,从而能够有效提高规划目标运动轨迹的准确性。
技术研发人员:崔金强,李若成
受保护的技术使用者:鹏城实验室
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!