一种室内物品飞行搬运机器人跟踪控制方法、装置及设备与流程
本发明涉及人工智能,具体涉及一种室内物品飞行搬运机器人跟踪控制方法、装置及设备。
背景技术:
1、飞行机器人与地面机器人相比,具有规避拥堵地面和复杂危险地面环境的优势,未来,飞行机器人室内巡逻、室内巡检、室内航拍等实际应用已经成为了生活或生产中不可缺少的一部分。利用飞行机器人开展室内搬运物品任务是被广泛研究和应用的一个方向,所谓搬运物品就是在飞行机器人上方或者下方安装物品输送系统,采用缆绳钩挂或者直接承受负载,在飞行机器人的控制下将物品运送到指定位置。采用飞行机器人做物品搬运无论是从升力效率、造价成本,还是可操控性、可靠性等方面都比其它机器人有优势。
2、在飞行搬运机器人搬运物品时,由于飞行机器人机体带动负载运动,物品的放置和取走的瞬间会导致整个系统重心发生变化,不稳定震荡造成的一系列气动干扰将导致系统难以实现有效的控制与跟踪。
技术实现思路
1、本发明主要解决的技术问题是在进行室内搬运物品时,飞行搬运机器人在物品放置和取走的瞬间所带来的不稳定震荡导致对飞行搬运机器人进行跟踪控制的准确度不够高。
2、根据第一方面,一种实施例中提供一种室内物品飞行搬运机器人跟踪控制方法,包括:
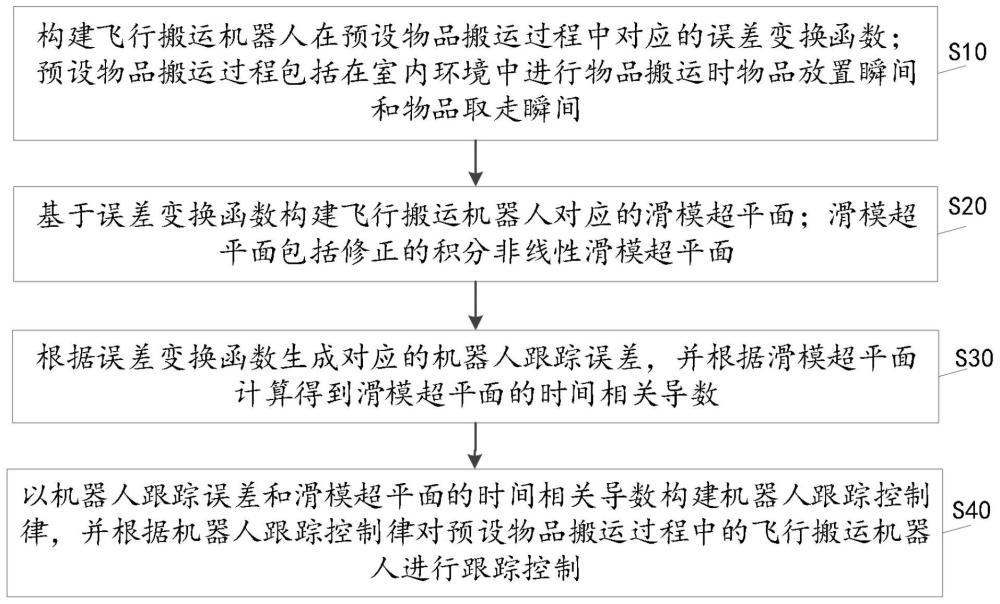
3、构建飞行搬运机器人在预设物品搬运过程中对应的误差变换函数;所述预设物品搬运过程包括在室内环境中进行物品搬运时物品放置瞬间和物品取走瞬间;
4、基于所述误差变换函数构建所述飞行搬运机器人对应的滑模超平面;所述滑模超平面包括修正的积分非线性滑模超平面;
5、根据所述误差变换函数生成对应的机器人跟踪误差,并根据所述滑模超平面计算得到滑模超平面的时间相关导数;
6、以所述机器人跟踪误差和所述滑模超平面的时间相关导数构建机器人跟踪控制律,并根据所述机器人跟踪控制律对所述预设物品搬运过程中的飞行搬运机器人进行跟踪控制。
7、一实施例中,所述构建飞行搬运机器人在预设物品搬运过程中对应的误差变换函数,包括:
8、根据所述预设物品搬运过程中的物品放置瞬间和物品取走瞬间构建轨迹跟踪误差函数;
9、根据所述飞行搬运机器人在预设时刻的稳态跟踪误差构建递减光滑函数;
10、获取预设误差函数,根据所述轨迹跟踪误差函数和所述递减光滑函数对所述预设误差函数进行函数变换处理,得到误差变换函数。
11、一实施例中,所述轨迹跟踪误差函数,包括:
12、
13、其中,e(t)表示t时刻的所述轨迹跟踪误差函数,x1(t)表示在t时刻所述飞行搬运机器人进行物品放置或者物品取走之后的状态,xd表示所述飞行搬运机器人进行物品放置或者物品取走之前的状态,表示在t时刻所述飞行搬运机器人进行物品放置或者物品取走之后的状态对应的一阶导数,表示所述飞行搬运机器人进行物品放置或者物品取走之前的状态对应的一阶导数,t表示转置矩阵。
14、一实施例中,所述递减光滑函数,包括:
15、ψ(t)=(ψ0-ψ∞)∈-μt+ψ∞
16、其中,ψ(t)表示t时刻的所述递减光滑函数,ψ0表示所述飞行搬运机器人在预设时刻为0时的稳态跟踪误差,ψ∞表示所述飞行搬运机器人在预设时刻接近∞时的稳态跟踪误差,∈表示欧拉数,μ表示收敛速度,t表示时间变量。
17、一实施例中,所述根据所述滑模超平面计算得到滑模超平面的时间相关导数,包括:
18、
19、其中,表示所述滑模超平面的时间相关导数,表示积分非线性函数对应的一阶导数,θ1(e,t)是第一时间相关导数,θ2(e,t)表示第二时间相关导数,表示轨迹跟踪误差函数对应的二阶导数,s表示所述飞行搬运机器人在预设物品搬运过程中对应的误差变换函数,ρ0表示所述飞行搬运机器人的第一机体参数,ρ1表示所述飞行搬运机器人的第二机体参数,表示所述飞行搬运机器人在物品放置和物品取走之前的状态对应的二阶导数。
20、一实施例中,所述基于所述误差变换函数构建所述飞行搬运机器人对应的滑模超平面,包括:
21、
22、其中,s表示所述飞行搬运机器人对应的滑模超平面,s表示所述飞行搬运机器人在预设物品搬运过程中对应的误差变换函数,t表示时间变量,s(0)表示当时间变量为0时误差变换函数对应的函数值,t1表示物品放置的瞬间的时间,t2表示物品取走的瞬间的时间,ρ0表示所述飞行搬运机器人的第一机体参数,ρ1表示所述飞行搬运机器人的第二机体参数。
23、一实施例中,所述根据所述误差变换函数生成对应的机器人跟踪误差,包括:
24、分别对所述误差变换函数进行进行一阶求导和二阶求导,得到所述误差变换函数对应的一阶导数及所述误差变换函数对应的二阶导数;
25、分别对所述误差变换函数对应的一阶导数及所述误差变换函数对应的二阶导数进行归一化处理,得到归一化后的所述误差变换函数对应的一阶导数和归一化后的所述误差变换函数对应的二阶导数;
26、根据所述归一化后的所述误差变换函数对应的一阶导数和所述归一化后的所述误差变换函数对应的二阶导数生成机器人跟踪误差。
27、根据第二方面,一种实施例中提供一种室内物品飞行搬运机器人跟踪控制装置,包括:
28、函数构建模块,用于构建飞行搬运机器人在预设物品搬运过程中对应的误差变换函数;所述预设物品搬运过程包括在室内环境中进行物品搬运时物品放置瞬间和物品取走瞬间;
29、超平面构建模块,用于基于所述误差变换函数构建所述飞行搬运机器人对应的滑模超平面;所述滑模超平面包括修正的积分非线性滑模超平面;
30、误差生成模块,用于根据所述误差变换函数生成对应的机器人跟踪误差,并根据所述滑模超平面计算得到滑模超平面的时间相关导数;
31、跟踪控制模块,用于以所述机器人跟踪误差和所述滑模超平面的时间相关导数构建机器人跟踪控制律,并根据所述机器人跟踪控制律对所述预设物品搬运过程中的飞行搬运机器人进行跟踪控制。
32、根据第三方面,一种实施例中提供一种室内物品飞行搬运机器人跟踪控制设备,包括:
33、存储器,用于存储程序;
34、处理器,用于通过执行所述存储器存储的程序以实现如本文中任一实施例所述的方法。
35、根据第四方面,一种实施例提供一种计算机可读存储介质,所述介质上存储有程序,所述程序能够被处理器执行以实现如本文中任一实施例所述的方法。
36、依据上述实施例的室内物品飞行搬运机器人跟踪控制方法、装置、设备及计算机可读存储介质,由于构建飞行搬运机器人在预设物品搬运过程中对应的误差变换函数,误差变换函数可以管理进行物品搬运时物品放置瞬间和物品取走瞬间误差变量的收敛速度。基于误差变换函数构建飞行搬运机器人对应的滑模超平面,滑模超平面可以消除飞行搬运机器人在物品放置和取走瞬间的奇异性问题,保证飞行搬运机器人在有限时间的滑模运动维持期望的瞬态。以根据误差变换函数生成的机器人跟踪误差和滑模超平面的时间相关导数构建机器人跟踪控制律,根据机器人跟踪控制律对预设物品搬运过程中的飞行搬运机器人进行跟踪控制,以实现对飞行搬运机器人在搬运物品时的准确跟踪控制。
- 还没有人留言评论。精彩留言会获得点赞!