一种太阳能无人机自毁系统及方法与流程
本发明属于太阳能无人机自毁,更具体地,涉及一种太阳能无人机自毁系统及方法。
背景技术:
1、自毁系统是一种安全措施,用于在火箭发生过程中出现危险或异常时,通过遥控或自动方式引爆火箭,防止其对地面或空中造成更大的损害。自毁系统通常由两部分组成:自毁装置和自毁指令。自毁装置是安装在火箭上的爆炸物或切割装置,用于破坏火箭的结构或推进剂系统,使其失去动力或解体。自毁指令是由地面或火箭上的计算机发出的信号,用于激活自毁装置。自毁指令可以是人工发出的,也可以是由火箭上的传感器检测到异常情况后自动发出的。
2、自毁系统在火箭或导弹上应用的较多,而传统的有人机或无人机因其航程和航时有限,在燃油或电能耗尽时即会失去动力坠毁,因此机上也无需额外配备自毁装置。而太阳能无人机等超长航时飞行器,因其实现了能量供给-消耗自闭环,具备超长航时和超长航程的能力。即使太阳能无人机失去动力,也具备较强的滑翔能力。在太阳能无人机遇到突发状况需要自毁时,如果不执行自毁,将会继续飞行,超出安全空域或造成其他事故。但太阳能无人机载重能力十分有限,一旦承载重量过大或功耗过大,将会大大影响其飞行性能,因此无法额外配置一套独立的自毁装置。因此,如何实现太阳能无人机的自毁,是一个亟需解决的技术难题。
技术实现思路
1、本发明的目的是针对现有技术中存在的不足,提供一种太阳能无人机自毁系统及方法,解决现有技术中没有适合于太阳能无人机自毁的自毁系统的问题。
2、为了实现上述目的,本发明提供一种太阳能无人机自毁系统,包括:
3、机载导航设备,用于实时获取无人机的位置信息;
4、飞控计算机,与所述机载导航设备连接,用于接收所述位置信息,所述飞控计算机包括自毁处理单元,所述自毁处理单元内设置有飞行空域边界信息,所述自毁处理单元用于判断所述位置信息是否超出所述飞行空域边界信息,若所述位置信号不超出所述飞行空域边界信息,则无人机正常执行飞行任务,若所述位置信号超出所述飞行空域边界信息,则发出自毁指令;
5、自毁执行机构,与所述自毁处理单元连接,包括无人机的驱动电机、无人机的平尾升降舵、无人机的垂尾方向舵、无人机的副翼中的至少一个。
6、可选地,所述自毁指令包括驱动电机停机指令、平尾升降舵负向满偏指令、垂尾方向舵正向满偏指令、副翼正向满偏指令中的至少一个。
7、可选地,所述无人机包括两个平尾和两个垂尾,每个所述平尾上设置有两个平尾升降舵,每个所述垂尾上设置有一个垂尾方向舵,所述无人机的机翼上在靠近机翼的两端的位置分别设置有三个副翼。
8、可选地,所述机载导航设备包括主导航设备和备用导航设备,所述主导航设备为惯性/天文/卫星组合导航设备,所述备用导航设备为mems导航设备。
9、可选地,还包括地面控制站,所述地面控制站能够向所述无人机发送遥控自毁指令。
10、本发明还提供一种太阳能无人机自毁方法,基于上述的太阳能无人机自毁系统,包括:
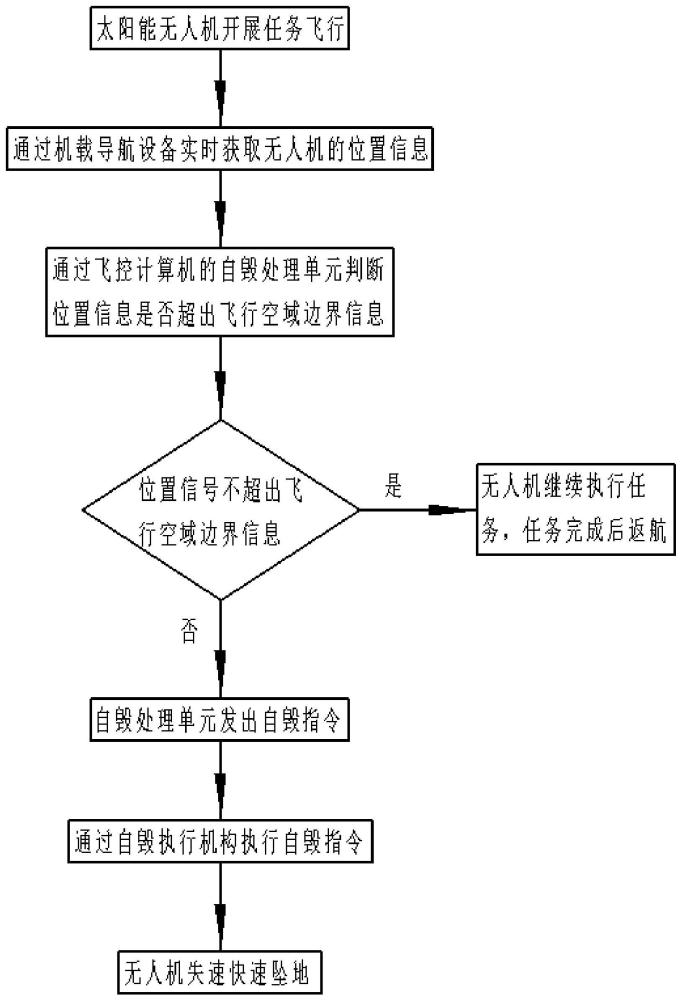
11、通过机载导航设备实时获取无人机的位置信息;
12、通过飞控计算机接收位置信息;
13、通过飞控计算机的自毁处理单元判断位置信息是否超出飞行空域边界信息,若位置信号不超出飞行空域边界信息,则无人机正常执行飞行任务,若位置信号超出飞行空域边界信息,则发出自毁指令;
14、通过自毁执行机构执行自毁指令。
15、可选地,若位置信号超出飞行空域边界信息,则通过所述自毁执行机构发出驱动电机停机指令、平尾升降舵负向满偏指令、垂尾方向舵正向满偏指令、副翼正向满偏指令中的至少一个。
16、可选地,在无人机上进行平尾升降舵、垂尾方向舵、副翼的冗余设置,使得平尾升降舵、垂尾方向舵、副翼的数量大于满足自毁动作所需的数量。
17、可选地,在无人机上设置主导航设备和备用导航设备,采用惯性/天文/卫星组合导航设备作为主导航设备,采用mems导航设备作为备用导航设备。
18、可选地,还包括提供能够向无人机发送遥控自毁指令的地面控制站,在地面控制站与无人机的通信链路正常时,通过地面控制站向无人机发送遥控自毁指令,在地面控制站与无人机的通信链路断开时,无人机通过自毁处理单元自动执行自毁判断和自毁指令的发出。
19、本发明提供一种太阳能无人机自毁系统及方法,其有益效果在于:该太阳能无人机自毁系统利用无人机上的机载导航设备和飞控计算机,通过机载导航设备实时获取无人机的位置信息,通过飞控计算机接收该位置信息,并通过飞控计算机内的自毁处理单元判断位置信息是否超出其预先储存的飞行空域边界信息,当位置信息超出飞行空域边界信息时,表示无人机飞出了飞行空域边界,此时自毁处理单元能够自动发出自毁指令,通过自毁执行机构接收自毁指令并执行自毁动作,进而实现无人机的自毁,自毁执行机构完全采用无人机本身具备的部件和机构,没有额外为无人机配置自毁装置,完全不增加无人机的重量和功耗,十分适合长航时航程的太阳能无人机的自毁需求。
20、本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
技术特征:
1.一种太阳能无人机自毁系统,其特征在于,包括:
2.根据权利要求1所述的太阳能无人机自毁系统,其特征在于,所述自毁指令包括驱动电机停机指令、平尾升降舵负向满偏指令、垂尾方向舵正向满偏指令、副翼正向满偏指令中的至少一个。
3.根据权利要求2所述的太阳能无人机自毁系统,其特征在于,所述无人机包括两个平尾和两个垂尾,每个所述平尾上设置有两个平尾升降舵,每个所述垂尾上设置有一个垂尾方向舵,所述无人机的机翼上在靠近机翼的两端的位置分别设置有三个副翼。
4.根据权利要求1所述的太阳能无人机自毁系统,其特征在于,所述机载导航设备包括主导航设备和备用导航设备,所述主导航设备为惯性/天文/卫星组合导航设备,所述备用导航设备为mems导航设备。
5.根据权利要求1所述的太阳能无人机自毁系统,其特征在于,还包括地面控制站,所述地面控制站能够向所述无人机发送遥控自毁指令。
6.一种太阳能无人机自毁方法,基于根据权利要求1-5任一项所述的太阳能无人机自毁系统,其特征在于,包括:
7.根据权利要求6所述的太阳能无人机自毁方法,其特征在于,若位置信号超出飞行空域边界信息,则通过所述自毁执行机构发出驱动电机停机指令、平尾升降舵负向满偏指令、垂尾方向舵正向满偏指令、副翼正向满偏指令中的至少一个。
8.根据权利要求7所述的太阳能无人机自毁方法,其特征在于,在无人机上进行平尾升降舵、垂尾方向舵、副翼的冗余设置,使得平尾升降舵、垂尾方向舵、副翼的数量大于满足自毁动作所需的数量。
9.根据权利要求6所述的太阳能无人机自毁方法,其特征在于,在无人机上设置主导航设备和备用导航设备,采用惯性/天文/卫星组合导航设备作为主导航设备,采用mems导航设备作为备用导航设备。
10.根据权利要求6所述的太阳能无人机自毁方法,其特征在于,还包括提供能够向无人机发送遥控自毁指令的地面控制站,在地面控制站与无人机的通信链路正常时,通过地面控制站向无人机发送遥控自毁指令,在地面控制站与无人机的通信链路断开时,无人机通过自毁处理单元自动执行自毁判断和自毁指令的发出。
技术总结
本发明提供一种太阳能无人机自毁系统及方法,涉及太阳能无人机自毁技术领域,包括:机载导航设备,用于实时获取无人机的位置信息;飞控计算机,与机载导航设备连接,用于接收位置信息,飞控计算机包括自毁处理单元,自毁处理单元内设置有飞行空域边界信息,自毁处理单元用于判断位置信息是否超出飞行空域边界信息,若位置信号不超出飞行空域边界信息,则无人机正常执行飞行任务,若位置信号超出飞行空域边界信息,则发出自毁指令;自毁执行机构,与自毁处理单元连接,包括无人机的驱动电机、无人机的平尾升降舵、无人机的垂尾方向舵、无人机的副翼中的至少一个;解决现有技术中没有适合于太阳能无人机自毁的自毁系统的问题。
技术研发人员:张凯,郭有光,宋璟,贺小艳,张寿勋,刘颖
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!